1.本实用新型属于翻车机卸载技术领域,具体地说是一种铁路运输作业正钩机器人。
背景技术:
2.陆上的燃煤电厂是主要的生产电力的来源,在众多的燃煤电厂中主要都是以火车车厢来运输煤矿。然后通过翻车机将火车车厢的煤矿卸下。陆上燃煤电厂中翻车机系统为主要装卸煤炭的方式,在其布置和形式种类上多种多样,其中又以往返式翻车线最为普遍使用。
3.人员穿插在折返式翻车机作业现场作业时,整列满载煤炭的车厢进入电厂到达翻车线前方停止,操作员按照翻车机卸载能力找到相应的车厢处将车钩进行提钩作业,在由重车调车机上的车钩和分开的车厢前段车钩进行连接,将分组车厢移动至翻车机上进行卸载作业,当翻车机进行作业过程中,在分组区,把车钩进行摘钩和需要把车钩掰开以便于重车调车机进行下次作业;当翻车机完成卸载作业后,作业员需要进入翻车机将因为翻车机旋转导致车钩整体位置偏移的车钩扶正;作业员退出作业场地后,重车调车机将卸载完成的车厢送往另一侧,通过移动平台将卸载完成的车厢送到返回轨道处。
4.而目前只能通过人工将车钩整体位置偏移的车钩扶正,对于作业员来说,操作繁琐,效率低下,且需要进入翻车机有较大的安全隐患。
技术实现要素:
5.针对目前只能通过人工将车钩整体位置偏移的车钩扶正的问题,本实用新型的目的在于提供一种铁路运输作业正钩机器人。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种铁路运输作业正钩机器人,包括作业平台、旋转驱动机构、传动机构、旋转盘及伸缩扶正组件,所述旋转驱动机构安装于所述作业平台上,所述旋转驱动机构的输出端通过所述传动机构与旋转盘连接、驱动所述旋转盘旋转;
8.所述伸缩扶正组件包括旋转臂、伸缩驱动件及扶正顶板,所述旋转臂安装于所述旋转盘上,所述伸缩驱动件的外壳安装于所述旋转臂上,所述伸缩驱动件的驱动端与所述扶正顶板连接,所述扶正顶板具有随旋转盘旋转的自由度及沿旋转臂长度方向往复移动的自由度。
9.所述旋转臂一端的左右两侧面上分别通过螺钉连接有若干个旋转臂连接座,各所述旋转臂连接座均通过螺钉安装于所述旋转盘上。
10.所述旋转臂上设有若干个导轨,所述扶正顶板上与各所述导轨对应的位置上分别设有滑块,各所述滑块分别与对应的所述导轨滑动连接。
11.所述扶正顶板远离所述旋转盘的一端设有垂直于所述扶正顶板轴向中心线的顶板面部。
12.所述旋转臂的一端上设有用于对所述扶正顶板进行限位的限位挡板。
13.所述作业平台固接有多个底座立柱。
14.每个所述底座立柱的上端均与所述作业平台固接,每个所述底座立柱的下端均固接有固定地脚,每个所述固定地脚上均开设有若干个螺栓穿过孔。
15.所述旋转驱动机构包括旋转电机及减速机,所述减速机的外壳分别与所述作业平台的底面及所述旋转电机的外壳连接,所述旋转电机的驱动轴与所述减速机的输入轴连接,所述减速机的输出轴作为旋转驱动机构的输出端与所述主动链轮连接。
16.所述作业平台上安装有止推轴承,所述从动链轮轮轴通过所述止推轴承与所述作业平台转动连接。
17.所述传动机构包括主动链轮、从动链轮及链条,所述主动链轮安装于所述旋转驱动机构的输出端上,所述作业平台上转动连接有从动链轮轮轴,所述从动链轮及所述旋转盘分别安装于所述从动链轮轮轴上,所述从动链轮与所述主动链轮之间通过链条连接。
18.本实用新型的优点与积极效果为:
19.1.本实用新型通过旋转驱动机构的设置,并采用链条作为传动部分来完成设备的旋转部分,可以适用的环境更加多样,不需要很高的安装精度和使用精度,可以方便精确地将伸缩扶正组件旋转到指定位置;
20.2.本实用新型通过旋转臂、伸缩驱动件及扶正顶板的配合设置,使伸缩驱动件伸出带动扶正顶板伸出,扶正顶板和车钩进行碰撞,使车钩可以有效进行扶正,结构更加简洁,保证了所需功能又使设备机械结构更加简便。
附图说明
21.图1为本实用新型的扶正顶板收回状态时的整体结构示意图;
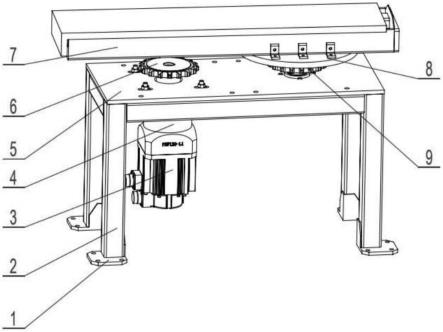
22.图2为本实用新型的扶正顶板伸出状态时的整体结构示意图;
23.图3为本实用新型的扶正顶板伸出状态时的部分结构示意图。
24.图中:1为固定地脚、2为底座立柱、3为旋转电机、4为减速机、5为作业平台、6为主动链轮、7为旋转臂、8为旋转盘、9为从动链轮、10为止推轴承、11为伸缩驱动件、12为扶正顶板、13为旋转臂连接座、14为限位挡板、15为导轨。
具体实施方式
25.下面结合附图1-3对本实用新型作进一步详述。
26.一种铁路运输作业正钩机器人,如图1-3所示,本实施例中包括作业平台5、旋转驱动机构、传动机构、旋转盘8及伸缩扶正组件,旋转驱动机构安装于作业平台5上,旋转驱动机构的输出端通过传动机构与旋转盘8连接、驱动旋转盘8旋转。
27.传动机构包括主动链轮6、从动链轮9及链条,主动链轮6安装于旋转驱动机构的输出端上,作业平台5上转动连接有从动链轮轮轴,从动链轮9及旋转盘8分别安装于从动链轮轮轴上,从动链轮9的轴向中心线、旋转盘8的轴向中心线及从动链轮轮轴的轴向中心线均共线,从动链轮9、旋转盘8及从动链轮轮轴安装设置结构均为现有技术,从动链轮9与主动链轮6之间通过链条连接,伸缩扶正组件安装于旋转盘8上。
28.具体而言,本实施例中作业平台5的四角分别固接有一个底座立柱2,每个底座立
柱2的上端均与作业平台5通过焊接固接,每个底座立柱2的下端均通过焊接固接有固定地脚1,每个固定地脚1上均开设有若干个螺栓穿过孔。通过使用螺栓穿过螺栓穿过孔使装置整体固定于待安装位置上,保证作业平台5的安装稳定。在翻车机系统头尾两侧分别安装本实用新型的正钩机器人,以对因为翻转而发生偏移的车钩进行整体的扶正。
29.具体而言,本实施例中旋转驱动机构包括旋转电机3及减速机4,减速机4的外壳分别与作业平台5的底面及旋转电机3的外壳连接,旋转电机3的驱动轴与减速机4的输入轴连接,减速机4的输出轴作为旋转驱动机构的输出端与主动链轮6连接。本实施例中减速机4为市购产品,旋转电机3也为市购的伺服电机,通过伺服电机的设置,使得旋转驱动机构可以实现精准的控制。
30.具体而言,本实施例中作业平台5上安装有止推轴承10,从动链轮轮轴通过止推轴承10与作业平台5转动连接,确保从动链轮轮轴稳定转动。止推轴承10为市购产品,止推轴承10与作业平台5及从动链轮轮轴的安装设置结构均为现有技术。
31.具体而言,本实施例中伸缩扶正组件包括旋转臂7、伸缩驱动件11及扶正顶板12,旋转臂7一端的左右两侧面上分别通过螺钉连接有若干个旋转臂连接座13,各旋转臂连接座13均通过螺钉安装于旋转盘8上,伸缩驱动件11的外壳安装于旋转臂7上,伸缩驱动件11的驱动端与扶正顶板12连接,扶正顶板12具有随旋转盘8旋转的自由度及沿旋转臂7长度方向往复移动的自由度。本实施例中伸缩驱动件11为市购的气缸,通过外接控制器控制动作,气缸的控制连接方式为现有技术,采用气缸响应速度快。伸缩驱动件11伸出带动扶正顶板12伸出,扶正顶板12和车钩进行碰撞,使车钩可以进行扶正。扶正顶板12远离旋转盘8的一端设有垂直于扶正顶板12轴向中心线的顶板面部,该顶板面部作为与车钩直接接触的直接碰撞端,碰撞面积较大,可有效扶正车钩。旋转臂7上设有两个导轨15,各导轨15的轴向中心线均与伸缩驱动件11的轴向中心线平行,扶正顶板12上与各导轨15对应的位置上分别设有滑块,各滑块分别与对应的导轨15滑动连接。旋转臂7的一端上设有用于对扶正顶板12进行限位的限位挡板14,防止扶正顶板12因意外故障脱离甚至与其他外部结构发生碰撞。
32.工作原理:
33.通过底座立柱2及固定地脚1的配合设置,可稳定固定作业平台5,并对作业平台5起到支撑作用;通过旋转驱动机构、主动链轮6、从动链轮9、旋转盘8的配合设置,可方便精确地将伸缩扶正组件旋转到指定位置,也可在不工作时旋回;通过旋转臂7、伸缩驱动件11及扶正顶板12的配合设置,使伸缩驱动件11伸出带动扶正顶板12伸出,扶正顶板12和车钩进行碰撞,使车钩可以有效进行扶正。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。