:
1.本实用新型涉及橡胶加工设备技术领域,更具体的说涉及一种橡胶输送定位机构。
背景技术:
2.现有的橡胶制造加工过程中,其需要将加工好的合成橡胶切割呈大型块状后,通过输送机构输送,而现有的输送机构一般将输送机构输送到操作人员位置处后,通过人工搬运,其效果差,效率低;
3.因此,现有的方式是采用六轴机器人从输送机构上抓取搬运,为了保证抓取位置的准确性,其需要将橡胶块进行定位,现有的方式是在输送架的一侧设置挡板,进行阻挡,但在输送过程中,橡胶块还是会偏移等问题出现,抓取的位置会改变,从而影响后续将橡胶块摆放到其他位置时,摆放位置容易产生偏差,影响后续取料等操作的精确度。
技术实现要素:
4.本实用新型的目的就是针对现有技术之不足,而提供一种橡胶输送定位机构,它可以将输送架上输送的橡胶块进行阻挡并将其对中,保证后续机械手抓取时的抓取位置准确,保证抓取效果。
5.本实用新型的技术解决措施如下:
6.一种橡胶输送定位机构,包括输送架,所述输送架的后部设有后固定板,后固定板的后壁面上固定有后水平连接板,后水平连接板的底面固定有升降油缸,升降油缸的推杆的顶端伸出后水平连接板的顶面并固定有升降块,升降块的前壁面上固定有升降挡板,升降挡板的上部处于输送架的上方的后部处;
7.所述输送架的后部的左右两侧均固定有侧水平固定板,侧水平固定板的顶面固定有竖直支撑板,竖直支撑板的外侧壁上固定有侧限位油缸,侧限位油缸的推杆的端部伸出竖直支撑板的内侧壁并固定有侧限位板。
8.所述后固定板的后壁面左右两侧均固定有竖直导轨,升降挡板的前壁面左右两侧均固定有导向滑块,竖直导轨插套在对应的导向滑块的滑槽中。
9.所述侧限位板的外壁面上固定有多个外导向杆,外导向杆插套在对应的竖直支撑板的导向通孔中。
10.所述升降挡板的前壁面上固定有加强块,加强块的前壁面上固定有防护耐磨板。
11.所述输送架包括左右对应的两个连接侧梁,多个传动辊处于两个连接侧梁之间,传动辊的两端转轴部通过轴承活动连接在两个连接侧梁上,传动辊的其中一端转轴部的端部伸出连接侧梁并固定有双排链轮,相邻两个传动辊的双排链轮的对应的两个链轮部之间张紧有链条,所述连接侧梁的中部外侧壁上固定有电机架,电机架的外连接板上固定有减速电机,减速电机的输出轴的端部伸处电机架的外连接板的内壁面并通过联轴器与对应的传动辊的一端转轴部的端部通过联轴器连接。
12.所述输送架的两个连接侧梁的中部顶面固定有竖直支腿,上水平板固定在所有的竖直支腿的顶面上,上水平板的后部上固定有升降机构,升降机构的下部安装有升降架,升降架的底板上固定有接近开关,接近开关的感应端竖直向下并靠近升降挡板的防护耐磨板的前壁面上方
13.所述升降机构包括竖直调节螺杆,竖直调节螺杆的中部插套在上水平板的后部成型的竖直通孔中,竖直调节螺杆的上端伸出竖直通孔的顶面,竖直调节螺杆上螺接有两个锁紧螺母,上水平板夹持在两个锁紧螺母之间。
14.本实用新型的有益效果在于:
15.它可以将输送架上输送的橡胶块进行阻挡并将其对中,保证后续机械手抓取时的抓取位置准确,保证抓取效果和后续放置位置的准确性。
附图说明:
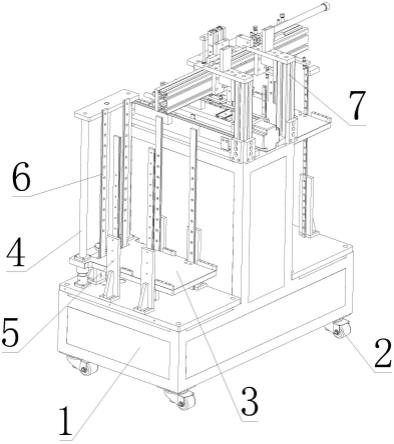
16.图1为本实用新型的局部俯视图;
17.图2为本实用新型的局部剖视图。
具体实施方式:
18.实施例:见图1至图2所示,一种橡胶输送定位机构,包括输送架10,所述输送架10的后部设有后固定板11,后固定板11的后壁面上固定有后水平连接板12,后水平连接板12的底面固定有升降油缸13,升降油缸13的推杆的顶端伸出后水平连接板12的顶面并固定有升降块14,升降块14的前壁面上固定有升降挡板15,升降挡板15的上部处于输送架12的上方的后部处;
19.所述输送架10的后部的左右两侧的支腿的外侧壁上均固定有侧水平固定板16,侧水平固定板16的顶面固定有竖直支撑板17,竖直支撑板17的外侧壁上固定有侧限位油缸18,侧限位油缸18的推杆的端部伸出竖直支撑板17的内侧壁并固定有侧限位板19。
20.进一步的说,所述后固定板11的后壁面左右两侧均固定有竖直导轨1,升降挡板15的前壁面左右两侧均固定有导向滑块2,竖直导轨1插套在对应的导向滑块2的滑槽中。
21.进一步的说,所述侧限位板19的外壁面上固定有多个外导向杆191,外导向杆191插套在对应的竖直支撑板17的导向通孔中。
22.进一步的说,所述升降挡板15的前壁面上固定有加强块151,加强块151的前壁面上固定有防护耐磨板152。
23.进一步的说,所述输送架10包括左右对应的两个连接侧梁101,连接侧梁101的底面固定有多个支腿,后固定板11固定在两个连接侧梁101的后端面上,多个传动辊102处于两个连接侧梁101之间,传动辊102的两端转轴部通过轴承活动连接在两个连接侧梁101上,传动辊102的其中一端转轴部的端部伸出连接侧梁101并固定有双排链轮103,相邻两个传动辊102的双排链轮103的对应的两个链轮部之间张紧有链条,所述连接侧梁101的中部外侧壁上固定有电机架20,电机架20的外连接板上固定有减速电机21,减速电机21的输出轴的端部伸处电机架20的外连接板的内壁面并通过联轴器与对应的传动辊102的一端转轴部的端部通过联轴器连接。
24.进一步的说,所述输送架10的两个连接侧梁101的中部顶面固定有竖直支腿30,上
水平板31固定在所有的竖直支腿30的顶面上,上水平板31的后部上固定有升降机构40,升降机构40的下部安装有升降架41,升降架41的底板上固定有接近开关42,接近开关42的感应端竖直向下并靠近升降挡板15的防护耐磨板152的前壁面上方。
25.进一步的说,所述升降机构40包括竖直调节螺杆43,竖直调节螺杆43的中部插套在上水平板31的后部成型的竖直通孔中,竖直调节螺杆43的上端伸出竖直通孔的顶面,竖直调节螺杆43上螺接有两个锁紧螺母44,上水平板31夹持在两个锁紧螺母44之间。其可以通过拧松两个锁紧螺母44,从而调节竖直调节螺杆43的高低位置,调节接近开关42的高低位置,保证其与输送的橡胶块的顶面相接近,方便不同批次的不同高度的橡胶块的输送感应。
26.所述后水平连接板12的顶面固定有上弹性防护块9,上弹性防护块9的顶面对着升降挡板15的底面,在使用时,通过升降挡板15的底面压靠在上弹性防护块9上,实现限位,并降低冲撞力。
27.本实施例在使用时,其可以将橡胶块放置在输送架10的传动辊102上,通过减速电机21运行,使得所有传动辊102转动,使得其上的橡胶块进行输送,一直向后输送并压靠到防护耐磨板152上,此时,接近开关42感应到橡胶块,就将感应信号输送给控制主机,控制主机就控制相应的液压系统(液压系统为常用的结构系统,其保证油泵、油箱、控制阀等结构)的控制阀运行,使得两个侧限位油缸18的推杆推动,使得两个侧限位板19压靠在橡胶块的左右两侧壁,将其对中,然后,减速电机21停止运行,两个侧限位油缸18的推杆回缩,然后,升降油缸13的推杆回缩,将升降挡板15下降并低于传动辊102的顶面,此时,即可通过六轴机器人将橡胶块抓取,其抓取效果好,抓取位置准确。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。