1.本实用新型涉及管道切割领域,具体涉及一种管道切割装置。
背景技术:
2.对管道进行斜切的过程中,管道容易产生滑动,进而影响斜切轨迹的准确性。
3.现有技术中,采用夹紧机构对管道进行夹紧,进而防止管道滑动。然而,切割机构通常从上至下对管道进行切割,夹紧机构为避免与切割机构碰撞,通常采用左右夹紧的方式,而由于斜切后的管道一侧长度大于另一侧,管道两侧斜切面与夹紧位置的距离不相等,斜切过程中,夹紧机构对管道两侧的约束力不相等,管道两侧受力不均,进而影响斜切轨迹准确性。
技术实现要素:
4.本实用新型意在提供一种管道切割装置,以提高斜切轨迹的准确性,进而使斜切面的更加平整。
5.为达到上述目的,本实用新型采用如下技术方案:一种管道切割装置,包括切割机构、夹紧机构,夹紧机构包括相对设置的抱紧管和抵紧件,抵紧件长度大于抱紧管,抱紧管和抵紧件远离切割机构一端对齐,抱紧管能包裹管道,抱紧管上设有第一缺口,抵紧件能于第一缺口处将管道抵紧。
6.本方案的有益效果为:
7.1.抱紧管将管道包裹,进而防止管道在斜切时发生变形,保证管道密度的均匀性,进而保证斜切轨迹准确性。
8.2.将抵紧件穿过第一缺口将管道抵紧,以防止管道在斜切时发生晃动,以保证斜切轨迹准确性。
9.3.在抱紧管和抵紧件没有对齐的一端,对悬挑的管道进行斜切,斜切后的管道一侧长度大于另一侧,而抵紧件长度大于抱紧管,进而使管道两侧悬挑的长度相近,夹紧机构对管道两侧的约束力相近,避免由于管道两侧受力不均而影响斜切轨迹准确性。
10.优选的,作为一种改进,抵紧件靠近管道一侧设有第二缺口,第二缺口的侧壁与抵紧管侧面过渡的棱能分别与管道的上部和下部抵紧。如此设置,抵紧件能通过第二缺口约束管道的竖向移动,进一步限制管道的位移,提高了斜切轨迹准确性。
11.优选的,作为一种改进,还包括送料机构,送料机构包括送料单元和送料气缸,送料单元能夹紧管道,送料气缸能使送料单元靠近夹紧机构。如此设置,相较于人工送料,送料机构送料更加平稳,能够减少送料中对管道的磨损;当对一个管道进行两次斜切时,由于送料气缸的输出轴长度固定,每次送料的距离固定,进而能够控制两个斜切面之间的距离。
12.优选的,作为一种改进,还包括箱体,切割机构设置在靠近抱紧管一侧,切割机构包括基体、机械臂、切割锯、切割气缸,机械臂的一端与基体转动连接,机械臂的另一端与切割锯中心转动连接,切割气缸的输出轴与机械臂靠近切割锯一端转动连接,切割气缸与箱
体转动连接。如此设置,通过切割气缸驱动切割锯靠近管道,通过旋转切割锯,对管道进行斜切。
13.优选的,作为一种改进,夹紧机构、送料机构、切割机构设置在箱体内,箱体靠近送料机构一侧设有箱体缺口,箱体其余侧为透明板。如此设置,斜切过程中,碎屑被控制在箱体内,避免碎屑乱飞,便于清理。
14.优选的,作为一种改进,切割锯上套有防护罩,防护罩与机械臂固定连接。如此设置,防止切割锯伤到人,增加切割机构的安全性。
附图说明
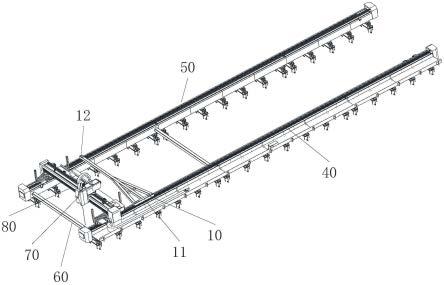
15.图1为实施例三维轴测图。
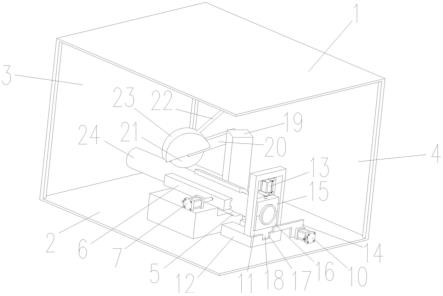
16.图2为夹紧机构截面示意图。
具体实施方式
17.下面通过具体实施方式进一步详细说明:
18.说明书附图中的附图标记包括:顶板1、底板2、玻璃板3、箱体缺口4、抱紧管5、抵紧件6、抵紧气缸7、第一缺口8、第二缺口9、送料气缸10、送料架11、滑道12、下压气缸13、连接板14、上夹具15、下夹具16、送料槽17、送料凸起18、基体19、机械臂20、切割锯21、切割气缸22、防护罩23、管道24。
19.实施例
20.实施例基本如图1所示:一种管道切割装置,包括箱体,箱体内设有夹紧机构、切割机构、送料机构,箱体为矩形,箱体包括顶板1、底板2、玻璃板3,箱体右侧开有箱体缺口4,玻璃板3安装在其余三个侧面,玻璃板3分别与顶板1、底板2固定连接,底板2上焊有底座,送料机构设置在箱体右侧。
21.夹紧机构包括相对设置的抱紧管5、抵紧件6和抵紧气缸7,抱紧管5与底座焊接,抵紧件6长度大于抱紧管5,抱紧管5和抵紧件6远离切割机构一端对齐,抱紧管5能包裹管道24,抵紧气缸7型号为亚德客型sc,抵紧气缸7螺栓连接在底座上,抵紧件6焊接在抵紧气缸7右侧的输出轴端部。;如图2所示,抱紧管5截面上偏左0
°‑
α
°
范围内开有第一缺口8,α
°
为135
°
,第一缺口8贯穿抱紧管5两端,抵紧件6能于第一缺口8处将管道24抵紧;抵紧件6右侧开有第二缺口9,第二缺口9的侧壁能分别与管道24的上部和下部抵紧。
22.如图1所示,送料机构包括送料单元、送料气缸10。送料单元能夹紧管道24,送料单元包括送料架11、滑道12、下压气缸13、连接板14、上夹具15和下夹具16,上夹具15和下夹具16上各开有一个半圆形缺口,这两个半圆形缺口能拼合成包裹管道24的圆形,该圆形与抱紧管5同轴心,滑道12螺栓连接在底板2上,滑道12上侧开有送料槽17,送料架11下侧焊有送料凸起18,送料凸起18滑动设置于送料槽17内,对送料架11的移动起导向作用,下夹具16焊在送料架11下部,下压气缸13螺栓连接在送料架11上部,上夹具15焊接在下压气缸13的输出轴下端,送料气缸10气缸螺栓连接在底板2上,连接板14两面分别与送料架11、送料气缸10输出轴焊接。
23.切割机构设置在靠近抱紧管5一侧,切割机构包括基体19、机械臂20、切割锯21、伺服电机和切割气缸22,基体19螺栓连接在底板2上,机械臂20通过销轴与基体19转动连接;
伺服电机型号为mr-j2s-100a,伺服电机螺栓连接在机械臂20上,机械臂20端部开有旋转孔,切割锯21中心焊有旋转轴,旋转轴穿过旋转孔,伺服电机驱动旋转轴旋转;切割气缸22与箱体的顶板1铰接,切割气缸22输出轴与机械臂20靠近切割锯21一端铰接;切割锯21上套有防护罩23,防护罩23焊接在机械臂20上。
24.下压气缸13、送料气缸10和切割气缸22的型号均为亚德客型sc。
25.具体实施步骤如下:
26.1.首先,将管道24放在下夹具16上,下压气缸13驱动上夹具15将管道24夹紧,送料气缸10驱动送料架11靠近夹紧机构,进而将管道24放在抱紧管5上,使管道24端部相对于抵紧件6端部突出。
27.2.抵紧气缸7驱动抵紧件6于第一缺口8处将管道24抵紧。
28.3.下压气缸13驱动上夹具15上升,送料气缸10驱动送料架11远离夹紧机构,下压气缸13驱动上夹具15将管道24夹紧。
29.4.伺服电机驱动切割锯21旋转,切割气缸22驱动机械臂20向下旋转,进而对管道24进行斜切。
30.5.抵紧气缸7驱动抵紧件6远离气缸,与第1-4步同理,进行第二次切割。
31.6.下压气缸13驱动上夹具15上升,取走切割后的管道24,清理废料。
32.以上所述的仅是本实用新型的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。