1.本发明涉及智能监控技术领域,尤其涉及一种精准自动跟踪目标的方法。
背景技术:
2.现有的监控系统一般是分析捕获到敏感信息(如有人入侵、画面移动等)能够触发报警、自动录像等,但是如果敏感信息移动到当前视角盲区后监控系统就无法实现自动全程跟踪。市面上还有一些通过提前标定的方式能够实现简单的自动跟踪,但是此方法局限性较大,对标定区域范围之外跟踪效果较差,另外还有一些根据图像分析对摄像机运动进行pid调节,此方案的缺点是当物体移动较快时摄像机转动会发生转动过冲,造成目标在画面中位置晃动模糊,转动过冲严重时会直接丢失目标,同时由于摄像机运动过程中空间位置的相对变化,造成单纯靠图像分析给出的运动策略会与实际图像变化有较大差别,尤其是摄像机仰角变大时,误差会更为明显。因此,急需开发一种精准自动跟踪目标的方法以解决上述技术问题。
3.有鉴于此,特提出本发明。
技术实现要素:
4.本发明的目的是提供一种精准自动跟踪目标的方法,通过合理的数学建模和严谨模型推导,具有较高的精确度,同时利用算法自动实现避免了前期标定的复杂度;直接角度控制可以使系统通过电机控制算法以最快速度精确运动到目标位置,避免了使用pid调节容易造成画面晃动的问题,提高了系统的动态响应能力和稳定性,具有广阔的应用前景,有利于推广应用。
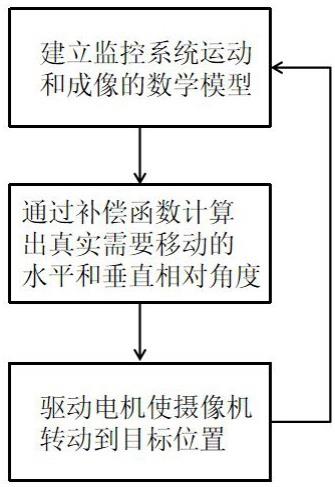
5.为了实现上述目的,本发明提供的一种精准自动跟踪目标的方法,包括如下步骤:s1:建立监控系统运动和成像的数学模型;s2:根据监控系统运动和成像的数学模型,通过补偿函数计算出真实需要移动的水平和垂直相对角度;s3:由监控系统电机控制模块驱动电机运行到相应的位置,实现目标跟踪。
6.优选地,所述s1中,建立监控系统运动和成像的数学模型的具体方法为:摄像机在水平和垂直方向360
°
旋转,能够观测到以摄像机为球心的环境画面,将摄像机所在位置抽象为球心,能够观测到的图像在空间上为一球面,摄像机转动到任一位置时,成像范围即为以摄像机轴心在球面上的投影为中心,以摄像机当前视场角为球心角的一个弧面,摄像机轴心在球面上的投影即对应当前成像画面的中心像素点。
7.优选地,所述s2中,水平需要移动的相对角度函数为:ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ)))上式中,ω 为水平方向需要移动的相对角度,x为目标像素点的水平坐标(以画面中心为坐标系原点),w为图像的水平方向分辨率,
ɑ
为摄像机当前的水平方向视场角,θ为摄像机当前物理仰角。
8.优选地,所述s2中,垂直需要移动的相对角度函数为:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ))上式中,φ为垂直方向需要移动的相对角度,x,y分别为目标像素点的水平、垂直坐标(以画面中心为坐标系原点),w、h分别为图像的水平、垂直方向分辨率,θ、β分别为摄像机当前水平、垂直方向视场角。
9.本发明提供的一种精准自动跟踪目标的方法,具有如下有益效果。
10.1.本发明通过合理的数学建模,将摄像机监控系统及其成像原理建立数学模型,并通过补偿函数计算出真实需要移动的水平和垂直相对角度,可以实现目标像素的精准跟踪定位,确保目标像素准确移动到画面中心,极大地提高了对目标跟踪的精确度。
11.2.本发明通过直接角度控制,可以使摄像机系统旋转机构以最快速度准确到达指定位置,避免了使用pid调节画面晃动和稳定时间长的缺点。
附图说明
12.图1为本发明提供的一种精准自动跟踪目标的方法的工作流程图;图2为摄像机监控系统数学模型;图3为摄像机成像水平面与空间水平面数学模型。
具体实施方式
13.下面结合具体实施例和附图对本发明做进一步说明,以助于理解本发明的内容。
14.如图1所示,为本发明提供的一种精准自动跟踪目标的方法的工作流程图。该精准自动跟踪目标的方法包括如下步骤:s1:建立监控系统运动和成像的数学模型,具体方法为:摄像机在水平和垂直方向360
°
旋转,能够观测到以摄像机为球心的环境画面,将摄像机所在位置抽象为球心,能够观测到的图像在空间上为一球面,摄像机转动到任一位置时,成像范围即为以摄像机轴心在球面上的投影为中心,以摄像机当前视场角为球心角的一个弧面,摄像机轴心在球面上的投影即对应当前成像画面的中心像素点。摄像机监控系统运动和成像数学模型如图2所示,球心o点为摄像机所在位置,g点为摄像机轴心在球面上的投影点,即为当前图像的中心点,当前摄像机水平视场角为
ɑ
,成像画面的水平中心线为cd,垂直中心线为sg所在弧线,且球心角∠cod = ɑ
。
15.如图2所示,假设要到达目标位置(t), 当前摄像机应从g点开始,x方向水平运动到达m点,再由m点垂直运动到目标位置(t)。这样,在垂直方向便会存在一个弧线mn对应的误差,即垂直方向的误差,该误差和水平方向走的角度有一定关系。
16.假设当前摄像机仰角为θ。θ = ∠gos。监控系统若想把目标点t移动到画面水平居中位置,需要水平转过的角度为∠sok(为了描述方便,我们把水平需要移动的角度称为ω,垂直需要转动的角度称为φ ),此时m点位于画面中心,再垂直运动∠mot即可,摄像机垂直视场角β可以通过摄像机规格书获取,因此∠not可通过t点像素点计算得到,∠mot = ∠not
ꢀ‑
∠mon。 因此我们只需计算∠mon即可,∠mon等于摄像机当前仰角θ减去n点对应的仰角∠kon。
17.将当前视场角所在的圆(经过圆心o)投影到水平面上,可得到新的模型进行分析。
摄像机成像水平面与空间水平面数学模型如图3所示,设n点在水平面上的投影点为l,可以知道点l会在半径 ok上,同理g点在水平面上的投影j会落在半径os上。沿n点向两个平面的相交线做垂线,垂足为p,则可知op面npl,所以oppl,且θ =∠gos=∠npl,图中pl//os,同时由于pn和go均垂直水平面和成像面的相交线op,因此∠nog=∠pno。
18.假设在二维摄像机画面中,以画面中心点(g点对应像素)为坐标原点,画面水平像素尺寸为w,垂直像素尺寸为h,t点坐标为(x,y),则t点相对于画面中心线对应的角度:∠nog=|x/w|*
ɑ
sin∠kon=nl/on=on*cos∠nog*sinθ /on=cos(|x/w|*
ɑ
)sinθ∠kon=asin(cos(|x/w|*
ɑ
)sinθ)上式中
ɑ
和w由摄像机规格书可以查询获取,x代表当前待跟踪目标在画面中的水平坐标位置(以画面中心为坐标原点),θ为摄像机当前仰角,由电机控制单元可以获取,由此可以计算出摄像机在垂直方向上需要补偿的运动角度为(θ-∠kon)。摄像机垂直方向实际需要转动的角度:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ))
ꢀꢀꢀ
(1)假设ω为水平方向上需要转动的角度,则ω=∠sok=∠plo,则sinω=op/ol=(on*sin∠pno)/(on*cos∠kon)=sin∠pno/cos∠kon=sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ))ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ)))
ꢀꢀꢀꢀ
(2)s2:根据监控系统运动和成像的数学模型,通过补偿函数计算出真实需要移动的水平和垂直相对角度;水平需要移动的相对角度函数为:ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ)))上式中,ω 为水平方向需要移动的相对角度,x为目标像素点的水平坐标(以画面中心为坐标系原点),w为图像的水平方向分辨率,
ɑ
为摄像机当前的水平方向视场角,θ为摄像机当前物理仰角。
19.垂直需要移动的相对角度函数为:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ))上式中,φ为垂直方向需要移动的相对角度,x,y分别为目标像素点的水平、垂直坐标(以画面中心为坐标系原点),w、h分别为图像的水平、垂直方向分辨率,θ、β分别为摄像机当前水平、垂直方向视场角。
20.s3:由监控系统电机控制模块驱动电机运行到相应的位置,实现目标跟踪。
21.例如:使用200w像素摄像机(画面尺寸1920*1080)进行移动目标跟踪,摄像机监测到移动目标,像素位置为(1800,540),则以画面中心点为坐标原点,转换后移动目标中心坐标为(840,0)摄像机当前视场角为56
°
*30
°
。当前已知参数如下:x=840,y=0,w=1920,h=1080,
ɑ
=56
°
,β=30
°
(1)假设当前摄像机仰角为0
°
,即摄像机水平摆放,则θ = 0
°
,带入补偿公式垂直需要移动的角度:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ)) = 0水平需要转动的角度
ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ))) = 24.5
°
结论:摄像机位于水平位置,目标点在画面中心线上,与中心点偏移角度为摄像机只需水平旋转24.5
°
,垂直方向无需补偿。
22.(2)假设当前摄像机仰角为45
°
,即θ = 45
°
,带入补偿公式垂直需要移动的角度:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ)) =
ꢀ‑
4.95
°
水平需要转动的角度ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ))) = 32.8
°
结论:摄像机当前仰角45
°
时,若需把目标点(840,0)移动到屏幕中心,摄像机需水平旋转32.8
°
,垂直方向向下旋转4.95
°
。
23.(3)假设当前摄像机仰角为90
°
,即θ = 90
°
,带入补偿公式垂直需要移动的角度:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ)) =
ꢀ‑
24.5
°
水平需要转动的角度ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ))) = 90
°
结论:摄像机当前仰角90
°
时,此时画面中心点为模型中球体正上(下)方z点,若需把目标点(840,0)移动到屏幕中心,摄像机需水平旋转90
°
,垂直方向向下旋转24.5
°
。
24.本发明通过合理的数学建模,将摄像机监控系统及其成像原理建立数学模型,并通过补偿函数计算出真实需要移动的水平和垂直相对角度,可以实现目标像素的精准跟踪定位,确保目标像素准确移动到画面中心,极大的提高了对目标跟踪的精确度。本发明通过直接角度控制,可以使摄像机系统旋转机构以最快速度准确到达指定位置,避免了使用pid调节画面晃动和稳定时间长的缺点。
25.本文中应用了具体个例对发明构思进行了详细阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离该发明构思的前提下,所做的任何显而易见的修改、等同替换或其他改进,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
