技术特征:
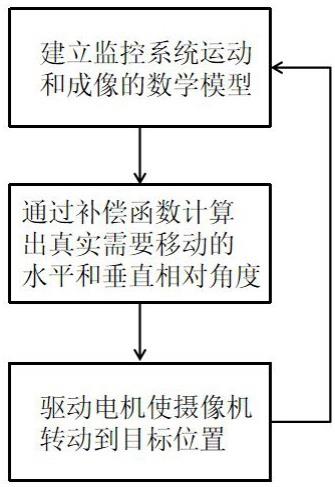
1.一种精准自动跟踪目标的方法,其特征在于,包括如下步骤:s1:建立监控系统运动和成像的数学模型;s2:根据监控系统运动和成像的数学模型,通过补偿函数计算出真实需要移动的水平和垂直相对角度;s3:由监控系统电机控制模块驱动电机运行到相应的位置,实现目标跟踪。2.根据权利要求1所述的一种精准自动跟踪目标的方法,其特征在于,所述s1中,建立监控系统运动和成像的数学模型的具体方法为:摄像机在水平和垂直方向360
°
旋转,能够观测到以摄像机为球心的环境画面,将摄像机所在位置抽象为球心,能够观测到的图像在空间上为一球面,摄像机转动到任一位置时,成像范围即为以摄像机轴心在球面上的投影为中心,以摄像机当前视场角为球心角的一个弧面,摄像机轴心在球面上的投影即对应当前成像画面的中心像素点。3.根据权利要求1所述的一种精准自动跟踪目标的方法,其特征在于,所述s2中,水平需要移动的相对角度函数为:ω = asin(sin(|x/w|*
ɑ
)/cos(asin(cos(|x/w|*
ɑ
)*sinθ)))上式中,ω 为水平方向需要移动的相对角度,x为目标像素点的水平坐标(以画面中心为坐标系原点),w为图像的水平方向分辨率,
ɑ
为摄像机当前的水平方向视场角,θ为摄像机当前物理仰角。4.根据权利要求1所述的一种精准自动跟踪目标的方法,其特征在于,所述s2中,垂直需要移动的相对角度函数为:φ = |y/h|*β-(θ-asin(cos(|x/w|*
ɑ
)*sinθ))上式中,φ为垂直方向需要移动的相对角度,x,y分别为目标像素点的水平、垂直坐标(以画面中心为坐标系原点),w、h分别为图像的水平、垂直方向分辨率,θ、β分别为摄像机当前水平、垂直方向视场角。
技术总结
本发明公开了一种精准自动跟踪目标的方法,包括如下步骤:S1:建立监控系统运动和成像的数学模型;S2:根据监控系统的数学模型,通过补偿函数计算出真实需要移动的水平和垂直相对角度;S3:由监控系统电机控制模块驱动电机运行到相应的位置,实现目标跟踪,本发明通过合理的数学建模和严谨模型推导,具有较高的精确度,同时利用算法自动实现避免了前期标定的复杂度;直接角度控制可以使系统通过电机控制算法以最快速度精确运动到目标位置,避免了使用PID调节容易造成画面晃动的问题,提高了系统的动态响应能力和稳定性,具有广阔的应用前景,有利于推广应用。有利于推广应用。有利于推广应用。
技术研发人员:米向飞
受保护的技术使用者:天津光电集团有限公司
技术研发日:2022.08.31
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。