1.本发明涉及医疗辅助器械技术领域,具体涉及一种腹腔镜戳卡最优位点模拟定位选择系统。
背景技术:
2.医学数字三维重建技术是指通过对ct、mr等影像数据进行数字化处理,再重建构成虚拟三维立体模型。三维重建得到的虚拟模型可以直观的展示人体内各组织、脏器的解剖结构关系及病灶在人体内的部位。
3.腹腔镜手术是目前微创外科手术的主要组成部分,通过在腹腔、胸腔等人体表面使用戳卡穿刺器穿刺出用于后续腔镜器械通过的戳卡孔,是进行腹腔镜手术的第一步骤。戳卡区域为整个腹部肚皮所在的区域。手术的第一步是在腹部这片肚皮区域内选定5个点位,用来打孔,刺穿这5处的皮肤和腹壁,打5个通往腹腔内部的孔洞。这5个孔位除了其中一个用来放摄像头的孔位比较固定以外,其余的4个孔是用来放操作器械的。
4.由于人体站位方位、人体手腕关节与腹腔镜操作器械持握手柄存在一定角度,而并非可以360
°
自由旋转。使得腔镜手术操作时,会受到戳卡孔打孔位置的影响,使其内部腔镜器械操作范围存在一定限制,超出限制范围的位置将无法使用腔镜手术器械进行有效外科操作。同时,在可及的操作范围内,由于人体运动的生理习性,存在一个人体活动最佳舒适度的操作空间。如果病灶位于此空间内,则将使得操作者能更加灵活、顺手的进行腔镜下精准操作,降低不必要的操作损伤。
5.现实中,戳卡孔位的选择常常依赖经验,根据病灶不同的位置,操作者不同的习惯、以及对腔镜操作器械的认知,不同的腔镜操作者常使用不同的戳卡孔位。由于缺乏对戳卡孔位选择位置与最佳操作范围的可视化工具来进行模拟打孔,部分经验尚不成熟的腔镜初级操作者时常会面临戳卡孔位选择欠佳的情况。导致要么使用别扭的姿态完成操作,要么重新调整打孔位置,增加新的戳卡孔位。无论是前者使用别扭的姿态,还是后者新增加孔位,都将给患者带来不利影响,增加手术的并发症风险。
技术实现要素:
6.鉴于目前存在的上述不足,本发明提供一种腹腔镜戳卡最优位点模拟定位选择系统,可以用于模拟出最优位点,使得操作更加方便和舒适,降低并发症的风险。
7.为了达到上述目的,本发明提供一种腹腔镜戳卡最优位点模拟定位选择系统,包括:用于承载目标对象的手术床,所述目标对象的多个解剖位置处均设有体表标贴,所述体表标贴内设有辅助定位芯片,所述目标对象的模拟位置还设有模拟定位芯片,所述手术床上设置有多个探测装置;显示器;位置计算模块,所述位置计算模块与探测装置和所述显示器连接,所述位置计算
模块用于:以所述手术床所在的手术室内的任意一点为原点构建坐标系;根据探测装置探测到的第一信号,确定多个所述辅助定位芯片在所述坐标系中的位置;所述第一信号为多个所述辅助定位芯片发射的信号;将预先构建的所述目标对象的三维重建模型转换至所述坐标系下;所述三维重建模型中与所述解剖位置对应的位置,与该解剖位置在所述坐标系中的位置重合;根据探测装置探测到的第二信号,确定所述模拟定位芯片在所述坐标系中的位置,并通过所述显示器显示所述坐标系、所述三维重建模型和所述模拟定位芯片在所述坐标系中的位置;所述第二信号为所述模拟定位芯片发射的信号;根据所述模拟定位芯片在三维重建模型的位置模拟确定其是否为最优位点。
8.依照本发明的一个方面,还包括:激光器,所述激光器与所述位置计算模块进行连接,所述激光器用于:根据所述位置计算模块在三维重建模型模拟出的最优位点将所述激光器的激光照射到目标对象的对应的位置。
9.依照本发明的一个方面,所述的根据所述模拟定位芯片在三维重建模型的位置模拟确定其是否为最优位点具体是通过以下函数确定的,其中是三维空间坐标点的集合,符合:其中,分别为4个不同的模拟位置的最佳操作空间;为4个不同的模拟位置的最佳操作空间的交汇空间;为任一模拟位置的空间坐标;h为目标对象平躺时测量到的躯干垂直厚度;为拟打孔位置与坐标原点o所形成的直线映射在xoy平面与x轴正方向的逆时针的夹角;;;当时,;当,;目标对象中轴线平行标准手术床坐标系的yoz平面,为目标对象的中轴线在x轴上对应的坐标值。
10.依照本发明的一个方面,所述手术床包括床板,所述床板下方设有可升降床柱,所述可升降床柱的底部连接有底板,所述底板的一端垂直连接有竖直杆,竖直杆的上端连接有一平行床板的矩形支架,所述矩形支架位于床板的正上方;所述矩形支架的每个角均设有一探测装置,所述矩形支架的两侧边设有第一导轨,第一导轨上滑动连接有第一滑轮,两侧第一导轨上的第一滑轮通过第二导轨进行连接,第二导轨上滑动连接有第二滑轮,第二滑轮连接有激光器,第一滑轮和第二滑轮上均设有驱动电机,所述驱动电机与位置计算模
块进行连接。
11.依照本发明的一个方面,所述位置计算模块还用于:根据三维重建模型模拟出的最优位点在所述坐标系中的位置,对第一滑轮的驱动电机的运动量、第二滑轮的驱动电机的运动量进行控制,使所述激光器的激光束垂直指向所述目标对象体内的最优位点。
12.依照本发明的一个方面,所述位置计算模块还用于:将目标对象的未充气状态下的操作空间模拟生成已充气状态下的三维重建模型。
13.依照本发明的一个方面,所述体表标贴包括第一外壳和包裹在第一外壳内的射频芯片电路板与连接所述射频芯片电路板的金属天线板,所述金属天线板与所述探测装置进行无线连接。
14.依照本发明的一个方面,所述模拟定位芯片包括第二外壳和包括在第二外壳内的定位芯片和连接定位芯片和第二外壳的芯片固定锚,所述定位芯片与所述探测装置进行无线连接。
15.依照本发明的一个方面,所述探测装置包括底座、设置于底座上的球形外壳、设置于球形外壳内的信号收发机,以及设置于底座上的收发天线,所述收发天线分别与所述信号收发机和所述位置计算模块连接。
16.依照本发明的一个方面,所述模拟定位芯片的背面均有双面胶贴,所述双面胶贴由抗过敏粘胶制成。
17.本发明的上述方案有如下的有益效果:在本技术的实施例中,腹腔镜戳卡最优位点模拟定位选择系统通过位置计算模块为手术床构建坐标系,将预先构建的三维重建模型转换至该坐标系下,并在显示器中显示该三维重建模型以及模拟定位芯片在该三维重建模型的位置,并判断出模拟定位芯片是否为最优位点,和/或通过控制激光器运动之位置计算模块中虚拟出的最优位点的范围内。
18.本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
附图说明
19.图1为本技术一实施例的腹腔镜戳卡最优位点模拟定位选择系统的结构示意图;图2为本技术一实施例提供的体表标贴的结构示意图一;图3为本技术一实施例提供的体表标贴的结构示意图二;图4为本技术一实施例提供的模拟定位芯片的结构示意图一;图5为本技术一实施例提供的模拟定位芯片的结构示意图二;图6为本技术一实施例提供的探测装置的结构示意图一;图7为本技术一实施例提供的探测装置的结构示意图二;图8为本技术一实施例提供的体表标贴或模拟定位芯片与各探测装置的位置关系示意图;图9为本技术一实施例提供的显示器显示的任意一个模拟位置的最佳操作范围图;图10为本技术一实施例提供的显示器显示的任意两个模拟位置的最佳操作范围交汇的图;
图11为图1中a处的局部放大图;图12为图1中b处的局部放大图;图13为本技术一实施例提供的手术床的局部图。
20.附图说明:100、手术床;101、床板;102、可升降床柱;103、底板;104、竖直杆;105、第一导轨;106、第二导轨;107、第一滑轮;108、第二滑轮;109、驱动电机; 200、显示器;300、位置计算模块;400、体表标贴;401、第一外壳;402、射频芯片电路板;403、金属天线板;500、模拟定位芯片;501、第二外壳;502、定位芯片;503、芯片固定锚;504、双面胶贴;600、探测装置;601、底座;602、球形外壳;603、信号收发机;604、收发天线;700、激光器。
具体实施方式
21.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
22.应当理解,当在本技术说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
23.还应当理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
24.另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
25.在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
26.目前由于戳卡孔位的选择常常依赖经验,根据病灶不同的位置,操作者不同的习惯、以及对腔镜操作器械的认知,不同的腔镜操作者常使用不同的戳卡孔位。由于缺乏对戳卡孔位选择位置与最佳操作范围的可视化工具来进行模拟打孔,部分经验尚不成熟的腔镜初级操作者时常会面临戳卡孔位选择欠佳的情况。导致要么使用别扭的姿态完成操作,要么重新调整打孔位置,增加新的戳卡孔位。无论是前者使用别扭的姿态,还是后者新增加孔位,都将给患者带来不利影响,增加手术的并发症风险。
27.针对上述问题,本技术实施例提供一种腹腔镜戳卡最优位点模拟定位选择系统,腹腔镜戳卡最优位点模拟定位选择系统通过位置计算模块为手术床构建坐标系,将预先构建的三维重建模型转换至该坐标系下,并在显示器中显示该三维重建模型以及模拟定位芯片在该三维重建模型的位置,并判断出模拟定位芯片是否为最优位点,和/或通过控制激光器运动之位置计算模块中虚拟出的最优位点的范围内。
28.下面结合具体实施例对本技术提供的腹腔镜戳卡最优位点模拟定位选择系统进
行示范性的说明。
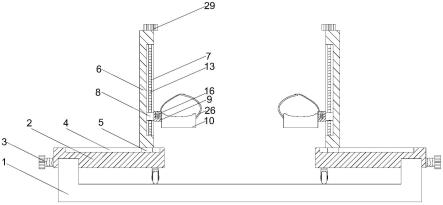
29.如图1所述,本技术的实施例提供一种腹腔镜戳卡最优位点模拟定位选择系统,该腹腔镜戳卡最优位点模拟定位选择系统包括:用于承载目标对象的手术床100,显示器200,位置计算模块300(图1中的位置计算模块位于与显示器连接的主机设备内)。
30.其中,目标对象的多个解剖位置处均设有体表标贴,所述体表标贴内设有辅助定位芯片,所述目标对象的模拟位置还设有模拟定位芯片,手术床100上设置有多个探测装置,体表标贴或辅助定位芯片与探测装置通过无线进行通信连接,探测装置与位置计算模块300通过无线进行通信连接。
31.在本技术的一些实施例中,手术床100包括床板101,床板101下方设有可升降床柱102,可升降床柱102的底部连接有底板103,所述底板103的一端垂直连接有竖直杆104,竖直杆104的上端连接有一平行床板101的矩形支架,所述矩形支架位于床板101的正上方;所述矩形支架的每个角均设有一探测装置。在本技术的一些实施例中,目标对象的多个解剖位置处均设有体表标贴,其目的是将目标对象的实际位置与位置计算模块300中进行虚拟显示,上述多个解剖位置可以为该人员体表“剑突”、“髂前上棘”等位置。
32.在本技术的一些实施例中,为便于将目标对象的实际位置在位置计算模块300中进行虚拟显示,如图2-3所示,上述体表标贴400包括第一外壳401和包裹在第一外壳401内的射频芯片电路板402与连接射频芯片电路板402的金属天线板403,所述金属天线板403与所述探测装置进行无线连接。
33.示例性的,在本技术的一些实施例中,第一外壳401为聚氯乙烯(pvc)医用外壳,体表标贴400的大小为直径3mm,长径10mm。
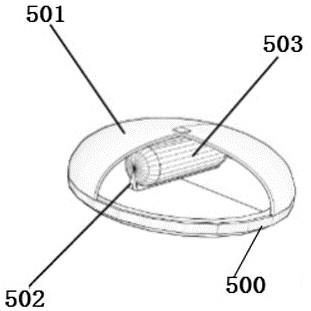
34.在本技术的一些实施例中,为便于将目标对象的模拟位置在位置计算模块300中进行虚拟显示出模拟出最佳操作空间,如图4所示,上述模拟定位芯片500包括第二外壳501和包括在第二外壳501内的定位芯片502和连接定位芯片502和第二外壳501的芯片固定锚503,所述定位芯片502与所述探测装置进行无线连接。
35.示例性的,在本技术的一些实施例中,如图5所示,第二外壳501为聚氯乙烯(pvc)医用外壳,模拟定位芯片500的背面有双面胶贴504,所述双面胶贴由抗过敏粘胶制成。
36.上述体表标贴和模拟定位芯片主要用于以一定频率发射信号,以使探测装置在接收到该信号以及信号强度后,将信号强度传输给处理器,进而使处理器计算确定其在三维重建模型中对应的位置。需要说明的是,体表标贴和模拟定位芯片所发射的信号的频率不同,从而使得位置计算模块能通过频率对接收到的各信号强度进行区分,分别确定体表标贴以及各模拟定位芯片的位置。
37.在本技术的一些实施例中上述多个探测装置用于探测体表标贴以及各模拟定位芯片的发送的信号及信号强度,以便位置计算模块根据对比的信号强度确定体表标贴以及各模拟定位芯片在三维重建模型的对应位置。
38.具体的,如图6-7所示,上述探测装置600包括底座601、设置于底座601上的球形外壳602、设置于球形外壳602内的信号收发机603,以及设置于底座601上的收发天线604,所述收发天线604分别与所述信号收发机603和位置计算模块连接。
39.其中,上述信号收发机主要用于:通过收发天线接收体表标贴以及各模拟定位芯片所发射的信号及信号强度,并通过收发天线将接收到的信号及信号强度传输给位置计算
模块。
40.上述处理器用于执行以下行为(即步骤一至步骤四)来实现最优位点模拟定位选择:步骤一:以手术床所在的手术室内的任一点为原点在构建坐标系,并在位置计算模块显示。
41.在本技术的一些实施例中,如图1所示,在手术床100床板101,床板101下方设有可升降床柱102,可升降床柱102的底部连接有底板103,所述底板103的一端垂直连接有竖直杆104,竖直杆104的上端连接有一平行床板101的矩形支架,所述矩形支架位于床板101的正上方;所述矩形支架的每个角均设有一探测装置。在实际应用中,可通过可升降床柱102的控制端(如控制开关)控制可升降床柱102的升降,从而使床板101在一适当高度。
42.在本技术的一些实施例中,处理器在构建上述坐标系时,为便于描述,选择以手术床上的某一探测装置所在位置为原点构建坐标系。
43.步骤二:根据探测装置探测到的第一信号(该第一信号为多个辅助定位芯片发射的信号),确定多个辅助定位芯片在坐标系中的位置。
44.在本技术的一些实施例中,为便于描述,将手术床上的4个探测装置分别记为,将以所在位置为原点o构建的坐标系的三个坐标轴分别记为x轴、y轴、z轴,假设辅助定位芯片在该坐标系下的坐标为,矩形支架为正方形框。基于此,针对上述多个辅助定位芯片中的每个辅助定位芯片,确定该辅助定位芯片在坐标系中的位置的具体过程可以为:首先,如图8所示,分别计算与辅助定位芯片之间的距离,其中,与辅助定位芯片之间的距离为 ,与辅助定位芯片之间的距离为,与辅助定位芯片之间的距离为,与辅助定位芯片之间的距离为;然后联合求解下列四个方程,解出辅助定位芯片的坐标值:其中,距离为中相邻两探测装置之间
的距离,均是通过探测装置获取的。为避免过多重复,在此以为例对辅助定位芯片与探测装置之间的距离计算方式进行示例性说明:,为接收到的信号强度(该信号强度是辅助定位芯片发射的),为辅助定位芯片和相距1m时的信号强度,为环境衰减因子。
45.步骤三:将预先构建的目标对象的三维重建模型转换至坐标系下。
46.具体的,在上述坐标系中,针对上述多个解剖位置中的每个解剖位置,三维重建模型中与该解剖位置对应的位置,与该解剖位置在坐标系中的位置重合,从而使三维重建模型在坐标系中与手术床的相对位置,与现实中目标对象与手术床的相对位置一致,进而确保后续模拟定位的准确性。
47.在本技术的一些实施例中,可以预先根据目标对象的电子计算机断层扫描(ct)数据构建目标对象的三维重建模型,在将该三维重建模型转移至上述坐标系的过程中,需要移动旋转三维重建模型,直至该三维重建模型中与解剖位置对应的位置,与目标对象的未充气状态下的解剖位置在坐标系中的位置重合。
48.在本技术的一些实施例中,将与目标对象的未充气状态下的解剖位置重合后的三维重建模型转换为已充气状态下的三维重建模型。需要说明的是,将未充气状态下的目标对象的三维重建模型转换为充气状态下的三维重建模型是公知的常识,这里不再赘述。
49.步骤四:根据探测装置探测到的第二信号(该第二信号为模拟定位芯片发射的信号),确定模拟定位芯片在坐标系中的位置,并通过位置计算模块显示坐标系、三维重建模型和模拟定位芯片在坐标系中的位置。
50.在本技术的一些实施例中,确定模拟定位芯片在坐标系中的位置的具体过程,与确定辅助定位芯片在坐标系中的位置的具体过程相同,因此,为避免过多重复,在此不在对该过程进行赘述。
51.在本技术的一些实施例中,在为确定出模拟定位芯片在坐标系中的位置后,可在显示器中显示上述坐标系、上述三维重建模型以及模拟定位芯片的位置。需要说明的是,由于三维重建模型与模拟定位芯片的位置在同一坐标系下,因此显示器能实时显示出模拟定位芯片在三维重建模型中的位置。
52.在本技术的一些实施例中,确定模拟定位芯片是否为最优位点的具体过程可以为:通过以下函数确定的,其中是三维空间坐标点的集合,符合:
其中,分别为4个不同的模拟位置的最佳操作空间;为4个不同的模拟位置的最佳操作空间的交汇空间;为任一模拟位置的空间坐标;h为目标对象平躺时测量到的躯干垂直厚度;为拟打孔位置与坐标原点o所形成的直线映射在xoy平面与x轴正方向的逆时针的夹角;;;当时,;当,;;目标对象中轴线平行标准手术床坐标系的yoz平面,为目标对象的中轴线在x轴上对应的坐标值。当在目标对象贴上模拟定位芯片,显示器会显示最佳操作空间,下面结合图9-10进行说明,如图9所示,模拟定位芯片所在水平面(参见图9的水平线参考线所在的平面)的下方顺时针0-15
°
不投影,15-30
°
投射范围形成外围灰区,30-60
°
投射范围为最佳操作范围,60-75
°
投射范围形成内围灰区,75-90
°
投射范围形成内围黑区。模拟定位芯片垂直方向沿着操作者面向方向(图9中的箭头方向为操作者面向方向),操作者面向方向后方120
°
不投影。如图10所示,任意两个模拟位置的最佳操作范围交汇的示意图,当4个模拟位置确定后,且病灶为最佳操作范围交汇空间内时,这4个模拟定位芯片所在的模拟位置即为4个最优位点。
53.在本技术的一些实施例中,在模拟定位芯片数量足够的情况下,可通过在目标对象的4个不同位置贴上模拟定位芯片,并通过位置计算模块300确定其是否为最优位点;若否,更换目标对象上模拟定位芯片的位置再通过位置计算模块300进行判断确定。即本实施例是在现实中选点。
54.在本技术的一些实施例中,当没有模拟定位芯片可用时,可通过在位置计算模块中进行虚拟选点模拟其是否为最优位点,在位置计算模块中进行选点具体为:通过手动控制激光器的位置使得激光器的激光垂直指向模拟打孔点,激光器将位置传回位置计算模块,传回的位置坐标作为生成最佳操作空间的坐标点,同时通过前述最佳操作空间函数,生成对应的最佳空间范围并显示,从而在位置计算模块判断其是否为最优位点;若否,继续手动控制激光器再通过位置计算模块判断。即本实施例是在虚拟模型中选点。
55.在本技术的一些实施例中,当出现模拟定位芯片不够的情况,可将模拟定位芯片和激光器结合起来进行选点,并通过位置计算模块判断其是否为最优位点,若否,可通过更换模拟定位芯片的位置和/或手动控制激光器的位置再通过位置计算模块判断。即本实施例通过现实选点和虚拟选点相结合的方式。
56.在本技术的一些实施例中,激光器安装在所述手术床的矩形支架,具体如图11-12所示,矩形支架的两侧边设有第一导轨105,第一导轨105上滑动连接有第一滑轮107,两侧第一导轨105上的第一滑轮107通过第二导轨106进行连接,第二导轨106上滑动连接有第二滑轮108,第二滑轮108连接有激光器700,第一滑轮和第二滑轮上均设有驱动电机109,驱动电机109与位置计算模块300进行连接。
57.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应
涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。