1.本发明涉及海带育苗生产领域,具体涉及一种海带育苗帘清洗机。
背景技术:
2.海带是一种在低温海水中生长的大型海生褐藻,也是我国养殖总产量最大的海藻品种;海带是一种海洋绿色时蔬,海带中含有人体所需的碘、铁、钙、蛋白质、维生素、甘露醇等营养元素,具有防治便秘、排毒养颜、预防肠癌、降血脂、预防动脉硬化、降血压、降血糖等多种作用,海带中含有的褐藻胶、盐藻多糖、甘露醇和碘等成分是海藻化工、农业废料、医疗保健等行业的重要原料。
3.育苗帘是海带育苗中的一种重要器具,海带苗在培育初期,在室内的育苗池内铺设苗帘,海带孢子附着在苗帘上生长,在海带苗的养殖过程中会反复出现杂藻,如果不及时进行清理会导致烂根并产生细菌,细菌会损伤海带苗,导致海带苗产量下降。为了确保海带苗健康成长,需要每隔2~3天对海带苗以及苗帘进行冲刷,确保不长杂藻以及苗帘的清洁。另外为了实现重复使用,用过后的育苗帘也需要进行清洗。现有的清洗方式一般采用人工清洗,由工人蹲在育苗池的走道上,手工将海带苗进行刷洗和喷淋冲洗,这种方式不仅劳动强度大,而且效率较为低下,且不便于对清洗水的回收利用,易造成水资源的浪费。因此,研制一种自动化程度高,使用方便,效率高,功能丰富的育苗帘清洗机,具有重要的实用价值。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一种海带育苗帘清洗机,能够代替人工完成育苗帘的清洁工作,降低人工劳动强度的同时,提高育苗帘的清洁效率,还能实现水资源的循环利用。
5.本发明采取的技术方案为:一种海带育苗帘清洗机,其特征在于:净水器固定设置于地面上,净水器可过滤水中的杂质和细菌;机架下端设有四个支撑腿,机架上设有一个水槽,水槽的后侧设有两组导轨,每组导轨均由两个平行的导轨组成,机架上端安装有增压水泵,增压水泵通过第一进水管与净水器的出水口接通,排水泵固定安装于机架后侧,并且水槽底部的出水口与排水泵的入口接通,排水泵的出口通过出水管与净水器的入口接通,从而排水泵可将水槽中的污水排进净水器中;翻板机构安装于机架上,翻板机构可用于夹持可翻转育苗帘;机器人机构固定安装于机架的上端下侧,机器人机构为delta并联机器人结构,其下端的动平台具有三个空间移动自由度,动平台内部设有一个圆形的竖向贯通孔,弹簧管盘旋为弹簧状,弹簧管可根据需要自动变化长度,弹簧管上端通过第二进水管与增压水泵接通,弹簧管下端与动平台中竖向贯通孔的上端接通,换模电机通过螺钉固定安装于动平台上侧的中心位置;旋转盘为圆盘结构,旋转盘同轴安装于动平台下侧并可自由转动,旋转盘的上侧中心位置与换模电机的输出轴同轴紧固连接,从而换模电机可实现旋转盘的转动和定位,旋转盘下侧周向均布设有四个螺纹通孔,四个螺纹孔中分别安装有横排喷头、粗喷头、细喷头、圆形喷头;摄像头安装于旋转盘的下侧中心位置,摄像头可用于实时采集
育苗帘上杂藻分布的图像信息,并将图像信息上传至上位机进行分析。
6.作为优选,水槽为开口向上的喇叭口结构。
7.作为优选,机器人机构主要包括静平台、第三电机、第一上臂、第一电机、第一杆组、弹簧管、动平台、旋转盘、换模电机、第二杆组、第二上臂、第二电机、第三杆组、第三上臂,其中静平台通过螺钉固定安装于机架的上端下侧,第一上臂、第二上臂、第三上臂的内端分别与静平台转动连接并分别由第一电机、第二电机、第三电机进行驱动,第一杆组、第二杆组、第三杆组分别与第一上臂、第二上臂、第三上臂的外端构成球面副,三个杆组的下端均与动平台构成球面副。
8.作为优选,第一杆组、第二杆组、第三杆组结构相同,并且每个杆组均由两个结构相同的长杆组成,每个长杆的两端均设有球窝结构。
9.作为优选,旋转盘与动平台之间设有防水密封结构,可防止水从两者之间的接触面溢出。
10.作为优选,横排喷头下端设有一字排开的多个喷水孔;粗喷头下端为圆形喷口;细喷头下端为圆形喷口,并且细喷头下端圆形喷口的直径小于粗喷头下端圆形喷口的直径;圆形喷头下端设有多个成圆形分布的喷水孔。
11.作为优选,横排喷头便可喷出一字形水帘,用于着重清洗育苗帘内条带之间的缝隙;粗喷头便可喷出高压圆形水柱,用于着重清洗聚集密度较大的杂藻;细喷头便可喷出较细的圆形水柱,用于着重清洗较为分散的杂藻;圆形喷头便可喷出面积较大的分散水柱,用于对育苗帘快速冲洗。
12.本发明的有益效果:
13.(1)本发明中采用了净水器对使用过的污水进行清洁,净水器可将水中的杂质和细菌过滤,清洁后的纯净水可循环使用,提高了水的利用率,可有效节约水资源。
14.(2)本发明中采用delta并联机器人作为喷头的承载和移动平台,delta机器人具有刚度大、定位精度高、动作速度快等优点,可更高效地完成对育苗帘的清洗工作,同时delta机器人也可长时间重复清洗动作,避免了人工长时间重复清洗工作产生疲乏导致清洗质量和效率降低的情况。
15.(3)翻板机构可实现育苗帘的自动翻面,提升了设备的自动化程度,也降低了工人的劳动强度,还能有效提高育苗帘的清洗效率,可使育苗帘双面都能得到有效清洗,提高育苗帘的清洗质量,有利于海带苗的健康生长。
16.(4)机器人机构下端设置有一个摄像头,摄像头可检测育苗帘是否摆放到位,也可识别育苗帘上杂藻和海带苗的生长分布情况,便于上位机进行数据处理,使清洗机可对育苗帘进行自动化清洗。
17.(5)机器人机构下端的旋转盘上安装有四个不同形状的喷头,其中横排喷头可喷出一字形水帘,用于着重清洗育苗帘内条带之间的缝隙,粗喷头可喷出高压圆形水柱,用于着重清洗聚集密度较大的杂藻,细喷头可喷出较细的圆形水柱,用于着重清洗较为分散的杂藻,圆形喷头可喷出面积较大的分散水柱,用于对育苗帘快速冲洗,多种喷头可根据需要自由更换,在提高育苗帘清洗效率的同时,也能明显提高清洗质量。
附图说明
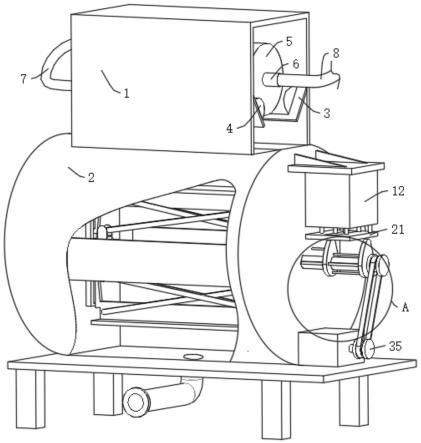
18.图1为本发明的整体结构示意图。
19.图2为本发明中清洗机构的整体结构示意图。
20.图3为翻板机构的整体结构示意图。
21.图4为本发明中左摆臂位置的局部剖面结构示意图。
22.图5为翻板机构在翻转育苗帘时的一个状态示意图。
23.图6为翻板机构在翻转育苗帘时的一个状态示意图。
24.图7为机器人机构的整体结构示意图。
25.图8为旋转盘位置的局部放大结构示意图。
26.图9为静平台的结构示意图。
27.附图标号:1机架、1.1水槽、2翻板机构、3机器人机构、4.1第一进水管、4.2第二进水管、5增压水泵、6.1排水泵、6.2出水管、7净水器、8静平台、8.1第一臂板、8.2第二臂板、8.3第三臂板、8.4圆通孔、9第三电机、10第一上臂、11第一电机、12第一杆组、13弹簧管、14动平台、15旋转盘、16换模电机、17第二杆组、18第二上臂、19第二电机、20第三杆组、21第三上臂、22横排喷头、23细喷头、24摄像头、25圆形喷头、26粗喷头、27夹帘电机、28丝杠、29左滑台、30左摆臂、31左夹板、31.1左限位片、32育苗帘、33支撑架、33.1限位台、34第二弹簧、35右夹板、35.1右限位片、36右摆臂、37右滑台、38第一弹簧、39同步带、40翻板电机。
具体实施方式
28.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
29.如图1~9所示,一种海带育苗帘清洗机,主要包括机架1、翻板机构2、机器人机构3、第一进水管4.1、第二进水管4.2、增压水泵5、排水泵6.1、出水管6.2、净水器7、育苗帘32,其中机架1下端设有四个支撑腿,机架1中间位置设有一个水槽1.1,水槽1.1为开口向上的喇叭口结构,水槽1.1底部设有出水口,排水泵6.1固定安装于机架1后侧,并且水槽1.1底部的出水口与排水泵6.1的入口接通,净水器7固定设置于机架1后方的地面上,排水泵6.1的出口通过出水管6.2与净水器7的入口接通,从而排水泵6.1可将水槽1.1中的污水排进净水器7中,净水器7可将水中的杂质和细菌过滤,水槽1.1的后侧设有两组导轨,每组导轨均由两个平行的导轨组成,两组导轨分别靠近机架1的左右两侧并且横向对应布置,增压水泵5固定安装于机架1的顶部上侧,第一进水管4.1的下端与净水器7下端的出口接通,第一进水管4.1的上端与增压水泵5的右侧入口接通,第二进水管4.2的右端与增压水泵5的左侧出口接通,增压水泵5可用于提高第二进水管4.2内的水压;育苗帘32为长方体形状,其内部设有多个条带可供海带孢子附着生长。
30.如图3所示,所述的翻板机构2主要包括夹帘电机27、丝杠28、左滑台29、左摆臂30、左夹板31、支撑架33、第二弹簧34、右夹板35、右摆臂36、右滑台37、第一弹簧38、同步带39、翻板电机40,其中支撑架33的前端上侧为镂空的平板结构,镂空的平板结构有利于为育苗帘32提供平稳的支撑并能使水流顺畅地通过支撑架33,支撑架33的后端上侧设有两个限位台33.1,两个限位台33.1的结构相同且左右对称,两个限位台33.1的前侧为竖向的平面,有利于为育苗帘32提供前后方向的限位,支撑架33的后端固定安装于水槽1.1后侧的横向中
间位置,并且支撑架33前端镂空的平板结构位于水槽1.1正上方;所述的夹帘电机27固定安装于机架1上并且位于支撑架33的正后方,夹帘电机27前端安装有一个蜗轮蜗杆减速器,所述的丝杠28左端为左旋螺纹结构,右端为右旋螺纹结构,丝杠28的中间位置与蜗轮蜗杆减速器的输出轴同轴紧固连接,从而夹帘电机27可驱动丝杠28的正反转。
31.所述的左滑台29下侧设有四个滑块,左滑台29的上端为一个水平的支撑台,水平的支撑台两端设有两个连接耳,左滑台29的后侧设有一个左旋丝杠滑块结构,左滑台29下侧的四个滑块分别与机架1左侧的一组导轨配合安装并构成移动副,同时左滑台29后侧的左旋丝杠滑块结构与丝杠28左端的左旋螺纹结构配合安装构成丝杠传动结构;所述的右滑台37下侧设有四个滑块,右滑台37的上端为一个水平的支撑台,水平的支撑台两端设有两个连接耳,右滑台37的后侧设有一个右旋丝杠滑块结构,右滑台37下侧的四个滑块分别与机架1右侧的一组导轨配合安装并构成移动副,同时右滑台37后侧的右旋丝杠滑块结构与丝杠28右端的右旋螺纹结构配合安装构成丝杠传动结构;从而夹帘电机27驱动丝杠28顺时针转动可使左滑台29和右滑台37同时向中间位置移动,夹帘电机27驱动丝杠28逆时针转动可使左滑台29和右滑台37同时向两侧移动。
32.如图4所示,所述左摆臂30的左侧向前伸出一个悬臂,悬臂的右侧中间位置设有一个圆孔,左摆臂30的后端与左滑台29上端的两个连接耳转动连接,从而左摆臂30可上下自由摆动,并且左滑台29上端水平的支撑台可为左摆臂30提供支撑,使左摆臂30在自由状态时可以处于水平姿态,左摆臂30的内部为中空结构;所述的翻板电机40内部集成有编码器,编码器可检测翻板电机40输出轴的转动角度,翻板电机40安装于左摆臂30内部左端,翻板电机40的输出轴上同轴安装有一个主动同步带轮;所述左夹板31的左侧中间位置设有转轴,该转轴同轴安装于左摆臂30前端悬臂右侧的圆孔中并可自由转动,左夹板31左侧的转轴上同轴安装有一个从动同步带轮,并且该从动同步带轮位于左摆臂30前端悬臂的内部;所述的同步带39安装于上述主动同步带轮和从动同步带轮之间并构成同步带传动结构,从而翻板电机40可通过同步带39实现左夹板31的转动;所述的左夹板31右侧上下边沿各设有两个左限位片31.1,两个上下对应的左限位片31.1之间的距离略大于育苗帘32的厚度,左夹板31右侧前后边沿各设有一个左限位片31.1,两个前后边沿上左限位片31.1之间的距离略大于育苗帘32的宽度;左夹板31右侧还设有两个矩形凸台,每个矩形凸台的中间位置均设有一个圆形盲孔,两个第一弹簧38的左端分别固定安装于上述两个圆形盲孔的底部,并且第一弹簧38的长度大于上述圆形盲孔的深度。
33.所述右摆臂36的右侧向前伸出一个悬臂,悬臂的左侧中间位置设有一个圆孔,右摆臂36的后端与右滑台37上端的两个连接耳转动连接,从而右摆臂36可上下自由摆动,并且右滑台37上端水平的支撑台可为右摆臂36提供支撑,使右摆臂36在自由状态时可以处于水平姿态,右摆臂36的内部为中空结构;右摆臂36的后端内部右侧同样固定安装有一个翻板电机,该翻板电机的输出轴上同轴安装有一个主动同步带轮;所述右夹板35的结构与左夹板31相同,右夹板35右侧的转轴同轴安装于右摆臂36前端悬臂左侧的圆孔中并可自由转动,右夹板35右侧的转轴上同轴安装有一个从动同步带轮,并且该从动同步带轮位于右摆臂36前端悬臂的内部;上述主动同步带轮和从动同步带轮之间安装有一个同步带并构成同步带传动结构,从而右摆臂36内部的翻板电机可通过同步带实现右夹板35的转动;所述的右夹板35左侧上下边沿各有两个右限位片35.1,两个上下对应的右限位片35.1之间的距离
略大于育苗帘32的厚度,右夹板35左侧前后边沿各设有一个右限位片35.1,两个前后边沿上右限位片35.1之间的距离略大于育苗帘32的宽度;右夹板35左侧还设有两个矩形凸台,每个矩形凸台的中间位置均设有一个圆形盲孔,两个第二弹簧34的右端分别固定安装于上述两个圆形盲孔的底部,并且第二弹簧34的长度大于上述圆形盲孔的深度。
34.如图7、图8、图9所示,所述的机器人机构3主要包括静平台8、第三电机9、第一上臂10、第一电机11、第一杆组12、弹簧管13、动平台14、旋转盘15、换模电机16、第二杆组17、第二上臂18、第二电机19、第三杆组20、第三上臂21,其中静平台8的中心位置设有一个圆通孔8.4,静平台8的下侧固定设有第一臂板8.1、第二臂板8.2、第三臂板8.3,三个臂板的结构相同并且关于圆通孔8.4成周向等角度均匀分布,静平台8通过螺钉固定安装于机架1的上端下侧。
35.所述的第一电机11为伺服电机,其内部集成有编码器和刹车,编码器可用于实时监测第一电机11输出轴的转动角度并将数据通过负反馈形式传递至控制系统,刹车可实现第一电机11输出轴的稳定锁止,第一电机11通过螺钉固定安装于第一臂板8.1的右侧;所述的第一上臂10外端设有两个球面结构,第一上臂10的内端安装于第一臂板8.1的左侧并与第一电机11的输出轴紧固连接,从而第一电机11可实现第一上臂10的转动和定位;所述的第一杆组12由两个结构相同的长杆组成,每个长杆的两端均设有球窝结构,第一杆组12中两个长杆上端的球窝结构分别与第一上臂10外端的两个球面结构配合并构成球面副;所述第二电机19的结构与第一电机11相同,第二电机19通过螺钉固定安装于第二臂板8.2的右侧;所述第二上臂18的结构与第一上臂10相同,第二上臂18的内端安装于第二臂板8.2的左侧并与第二电机19的输出轴紧固连接,从而第二电机19可实现第二上臂18的转动和定位;所述的第二杆组17与第一杆组12的结构相同,第二杆组17中两个长杆上端的球窝结构分别与第二上臂18外端的两个球面结构配合并构成球面副;所述第三电机9的结构与第一电机11相同,第三电机9通过螺钉固定安装于第三臂板8.3的右侧;所述第三上臂21的结构与第一上臂10相同,第三上臂21的内端安装于第三臂板8.3的左侧并与第三电机9的输出轴紧固连接,从而第三电机9可实现第三上臂21的转动和定位;所述的第三杆组20与第一杆组12的结构相同,第三杆组20中两个长杆上端的球窝结构分别与第三上臂21外端的两个球面结构配合并构成球面副。
36.如图8所示,所述的动平台14的主体为圆盘形,其外侧周向均布设有三个球面组,每个球面组均由两个球面结构组成,每个球面组中两个球面结构的球心距与第一上臂10外端两个球面结构之间的球心距相等;第一杆组12中两个长杆下端的球窝结构分别与动平台14前侧位置球面组中的两个球面结构配合并构成球面副;第二杆组17中两个长杆下端的球窝结构分别与动平台14左侧位置球面组中的两个球面结构配合并构成球面副;第三杆组20中两个长杆下端的球窝结构分别与动平台14右侧位置球面组中的两个球面结构配合并构成球面副;从而静平台8、第一上臂10、第二上臂18、第三上臂21、第一杆组12、第二杆组17、第三杆组20、动平台14构成delta并联机器人,动平台14在第一电机11、第二电机19、第三电机9的驱动作用下可实现空间三个坐标方向的移动自由度,也即是动平台14可前后、左右、上下移动。
37.如图7、图8所示,所述的动平台14内部靠近前侧位置设有一个圆形的竖向贯通孔,所述的弹簧管13盘旋为弹簧状,弹簧管13可根据需要自动变化长度,弹簧管13内部为中空
的管道,弹簧管13上端穿过圆通孔8.4后与第二进水管4.2的左端接通,弹簧管13下端与动平台14中竖向贯通孔的上端接通;换模电机16内部集成有编码器和刹车,编码器可检测换模电机16输出轴的转动角度,刹车可实现换模电机16输出轴的稳定锁止,换模电机16通过螺钉固定安装于动平台14上侧的中心位置。
38.如图8所示,所述的旋转盘15为圆盘结构,旋转盘15同轴安装于动平台14下侧并可自由转动,旋转盘15与动平台14之间设有一个旋转密封圈作为防水密封结构,可防止水从两者之间的接触面溢出,旋转盘15的上侧中心位置与换模电机16的输出轴同轴紧固连接,从而换模电机16可实现旋转盘15的转动和定位,旋转盘15的下侧中心位置设置有摄像头24,摄像头24可用于实时采集育苗帘32上杂藻分布的图像信息,并将图像信息上传至上位机;旋转盘15下侧周向均布设有四个螺纹通孔。
39.所述的横排喷头22上端与旋转盘15下侧的一个螺纹通孔通过螺纹紧固连接并接通,横排喷头22下端设有一字排开的多个喷水孔;所述的粗喷头26上端与旋转盘15下侧的一个螺纹通孔通过螺纹紧固连接并接通,粗喷头26下端为圆形喷口;所述的细喷头23上端与旋转盘15下侧的一个螺纹通孔通过螺纹紧固连接并接通,细喷头23下端为圆形喷口,并且该圆形喷口的直径小于粗喷头26下端圆形喷口的直径;所述的圆形喷头25上端与旋转盘15下侧的一个螺纹通孔通过螺纹紧固连接并接通,圆形喷头25下端设有多个成圆形分布的喷水孔。
40.当换模电机16驱动旋转盘15转动并使横排喷头22位于前位时,横排喷头22便与弹簧管13接通,当增压水泵5启动后,横排喷头22便可喷出一字形水帘,用于着重清洗育苗帘32内条带之间的缝隙;当换模电机16驱动旋转盘15转动并使粗喷头26位于前位时,粗喷头26便与弹簧管13接通,当增压水泵5启动后,粗喷头26便可喷出高压圆形水柱,用于着重清洗聚集密度较大的杂藻;当换模电机16驱动旋转盘15转动并使细喷头23位于前位时,细喷头23便与弹簧管13接通,当增压水泵5启动后,细喷头23便可喷出较细的圆形水柱,用于着重清洗较为分散的杂藻;当换模电机16驱动旋转盘15转动并使圆形喷头25位于前位时,圆形喷头25便与弹簧管13接通,当增压水泵5启动后,圆形喷头25便可喷出面积较大的分散水柱,用于对育苗帘32快速冲洗。
41.对育苗帘的清洗原理,如图3~8所示:
42.①
夹帘电机27驱动丝杠28逆时针转动,使左滑台29和右滑台37同时向两侧移动,使左夹板31和右夹板35之间的距离增大,此时左摆臂30在左滑台29上端水平支撑台的支撑作用下处于水平状态,右摆臂36在右滑台37上端水平支撑台的支撑作用下处于水平状态,与此同时左夹板31和右夹板35均处于水平状态;
43.②
可将育苗帘32放置于支撑架33上,并使育苗帘32的后端接触到两个限位台33.1前侧;
44.③
摄像头24识别到育苗帘32放置到位后,夹帘电机27启动使丝杠28顺时针转动,从而左滑台29和右滑台37同时向中间位置移动,直至第一弹簧38和第二弹簧34压缩后,左夹板31右侧的两个矩形凸台和右夹板35左侧的两个矩形凸台压紧育苗帘32的左右两端,此时六个左限位片31.1和六个右限位片35.1实现对育苗帘32左右两端的包拢限位;
45.④
摄像头24采集育苗帘32上侧面的图像信息,并将图像信息传送至上位机进行分析,从而确定海带苗的生长情况和杂藻的分布情况;机器人机构3采用合适的喷头实现对育
苗帘32上侧面杂藻的定点清除和对育苗帘32的清洗;
46.⑤
当需要翻转育苗帘32时,左摆臂30内部的翻板电机40和右摆臂36内部的翻板电机同时转动,使左夹板31和右夹板35同时逆时针转动,从而带动育苗帘32逆时针转动,也即是育苗帘32后端向上移动,育苗帘32前端在支撑架33上侧向后滑动,在此过程中,左摆臂30和右摆臂36向上摆动,直至育苗帘32翻转180
°
后变为水平状态,此时育苗帘32原先的上侧面翻转至下侧并与支撑架33上侧面接触,育苗帘32原先处于下侧的背面翻转至上侧;
47.⑥
重复上述第
④
步,直至育苗帘32的背侧面完成清洗;
48.⑦
夹帘电机27驱动丝杠28逆时针转动,使左滑台29和右滑台37同时向两侧移动,使左夹板31和右夹板35之间的距离增大,在第一弹簧38和第二弹簧34的弹力作用下,育苗帘32与左夹板31和右夹板35完全脱离并被放置于支撑架33上侧,工作人员便可将完成双面除藻清洁的育苗帘32取走,并放置另一个待清洗的育苗帘32。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。