1.本发明属于电动轮椅领域,特别涉及一种结构轻巧的自主转向驱动轮。
背景技术:
2.自主转向驱动轮是电动轮椅底盘的一个组成部分,同时也作为电动轮椅的动力装置,可适用于对转向能力要求比较高的电动轮椅,也适用于对转向能力要求比较高的车辆以及机器人等领域。自主转向驱动轮,涉及到机械、控制等领域,但是目前现有的同类产品技术中,自主转向驱动轮为实现转向功能要求,普遍存在自主转向驱动轮的内部结构设计复杂,装载有齿轮减速器等结构,结构较为复杂,同时需要搭配传统的,与之相匹配的复杂的传动组件,这便导致自主转向驱动轮的外部外加尺寸较大,附加造价较高等缺点,组装在电动轮椅上时还需要有复杂的电控组件进行电控,这对于使用者来说,不仅会对使用者造成一定的使用不便,而且,如若电动轮椅损坏后,检修的成本较高,对于厂家来说,经济附加成本较大,制造成本较高,因此,有必要对现有技术改进,以解决上述技术问题。
技术实现要素:
3.针对现有技术的不足,本发明的目的在于提供一种结构轻巧的自主转向驱动轮,解决背景技术中的问题,在实现驱动轮的自主转向功能的同时,精确控制转向角度,缩减结构尺寸,降低成本,提高企业的经济效益。
4.本发明是通过以下技术方案实现的:一种结构轻巧的自主转向驱动轮, 包括安装支架和悬挂底板,所述安装支架上固定连接有轴向电机,所述轴向电机的输出端上固定连接有悬挂支架,所述悬挂底板上转动连接有车轮,所述车轮上设有轮毂电机,所述悬挂支架与悬挂底板相平齐设置,所述悬挂支架与悬挂底板之间设支定组件和减震组件,通过所述支定组件可控制该驱动轮的径向位移方向,所述减震组件可降低对所述轴向电机的冲击。
5.本发明的进一步改进方案是,所述安装支架和悬挂支架上设有中空的的通孔,所述通孔相连形成穿线孔,控制系统的电缆穿过所述穿线孔与所述轮毂电机相连。
6.本发明的进一步改进方案是,所述支定组件包括前上摇臂、前下摇臂、侧上摇臂、侧下摇臂、后上摇臂和后下摇臂,所述前上摇臂和前下摇臂之间、侧上摇臂和侧下摇臂之间、后上摇臂和后下摇臂之间,两两相互铰接,且所述前上摇臂、侧上摇臂和后上摇臂转动连接在所述悬挂支架上,所述前下摇臂、侧下摇臂和后下摇臂转动连接在所述悬挂底板上。
7.本发明的进一步改进方案是,所述减震组件包括减震器,所述减震器的一端固定连接在所述悬挂支架上,所述减震器的另一端固定连接在所述悬挂底板上。
8.本发明的进一步改进方案是,所述悬挂支架为单边支架,与之相对应的,所述悬挂底板也为单边支架,所述支定组件和减震组件均设置在所述车轮的一侧。
9.本发明的进一步改进方案是,所述悬挂支架的下方两侧对称设有支定组件和减震组件,与之相对应的,所述悬挂底板为双边支架,两个所述悬挂底板分别对称安装在各侧的
所述支定组件和减震组件上,所述车轮的中轴转动连接在两个所述悬挂底板上。
10.本发明与现有技术相比,本发明公开的一种结构轻巧的自主转向驱动轮具有以下明显优点:1.一种结构轻巧的自主转向驱动轮, 包括安装支架和悬挂底板,所述安装支架上固定连接有轴向电机,所述轴向电机的输出端上固定连接有悬挂支架,通过轴向电机的方式,轴向电机具备低转速、大扭矩的优势,具有可以精确控制转向角度的特点,本发明所使用带有角度输出的轴向电机来直接控制悬挂支架的转向动作,不再需要齿轮减速器等附加结构,降低了驱动轮整体的结构复杂度,同时也降低了成本。
11.2.一种结构轻巧的自主转向驱动轮, 减震组件包括减震器,减震器的一端固定连接在悬挂支架上,减震器的另一端固定连接在悬挂底板上,减震器的设置,不仅可以避免减震过程中地面对转向电机的冲击,而且使得减震过程中车轮不会产生相对转向轴的位移。
12.3.一种结构轻巧的自主转向驱动轮, 支定组件包括前上摇臂、前下摇臂、侧上摇臂、侧下摇臂、后上摇臂和后下摇臂,前上摇臂和前下摇臂之间、侧上摇臂和侧下摇臂之间、后上摇臂和后下摇臂之间,两两相互铰接,且前上摇臂、侧上摇臂和后上摇臂转动连接在悬挂支架上,前下摇臂、侧下摇臂和后下摇臂转动连接在悬挂底板上,前上摇臂、前下摇臂、后上摇臂、后下摇臂的连接下可使得悬挂支架和悬挂底板之间在x轴和z轴方向可发生相对运动,可以绕某一个平行于y轴的直线转动,在其余多组摇臂的共同连接和约束下,悬挂支架和悬挂底板之间则只能发生z轴方向的相对运动,并且悬挂支架所挂载的轮毂电机和车轮只能沿z轴发生直线位移,这便使得减震过程中对轴向电机不会产生额外的附加转矩,进而提高驱动轮的稳定性。
附图说明
13.下面结合附图对本发明的上述特性、技术特征、优点及其实现方式予以作进一步说明。
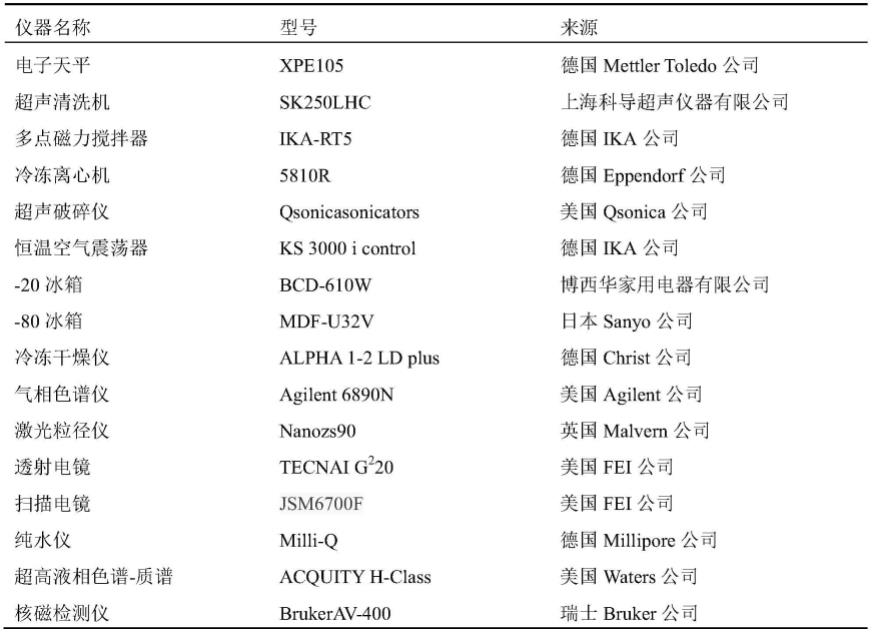
14.图1为本发明的实施例1中的一种结构轻巧的自主转向驱动轮的结构示意图图2为本发明的实施例1中部分结构示意图图3为图2中的部分结构侧视图图4为本发明的实施例2中的一种结构轻巧的自主转向驱动轮的结构示意图图5为本发明的实施例2中部分结构示意图图中,1-安装支架,2-轴向电机, 4-轮毂电机,5-车轮,101-穿线孔,301-悬挂支架,302-悬挂底板,303-前上摇臂,304-前下摇臂,305-侧上摇臂,306-侧下摇臂,307-后上摇臂,308-后下摇臂,309减震器。
具体实施方式
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。
16.实施例1如图1-3所示,本实施例提供了一种结构轻巧的自主转向驱动轮,包括安装支架1和悬挂底板302,安装支架1上固定连接有轴向电机2,轴向电机2的输出端上固定连接有悬
挂支架301,悬挂底板302上转动连接有车轮5,车轮5上设有轮毂电机4,悬挂支架301与悬挂底板302相平齐设置,悬挂支架301与悬挂底板302之间设支定组件和减震组件,通过支定组件可控制该驱动轮的径向位移方向,减震组件可降低对轴向电机2的冲击。
17.通过轴向电机2的方式,轴向电机2具备低转速、大扭矩的优势,具有可以精确控制转向角度的特点,本发明所使用带有角度输出的轴向电机2来直接控制悬挂支架301的转向动作,不再需要齿轮减速器等附加结构,降低了驱动轮整体的结构复杂度,同时也降低了成本。
18.安装支架和悬挂支架上设有中空的的通孔,通孔相连形成穿线孔101,控制系统的电缆穿过穿线孔101与轮毂电机4相连。
19.支定组件包括前上摇臂303、前下摇臂304、侧上摇臂305、侧下摇臂306、后上摇臂307和后下摇臂308,前上摇臂303和前下摇臂304之间、侧上摇臂305和侧下摇臂306之间、后上摇臂307和后下摇臂308之间,两两相互铰接,且前上摇臂303、侧上摇臂305和后上摇臂307转动连接在悬挂支架301上,前下摇臂304、侧下摇臂306和后下摇臂308转动连接在悬挂底板302上。
20.前上摇臂303、前下摇臂304、后上摇臂305、后下摇臂306的连接下可使得悬挂支架301和悬挂底板302之间在x轴和z轴方向可发生相对运动,可以绕某一个平行于y轴的直线转动,在其余多组摇臂的共同连接和约束下,悬挂支架301和悬挂底板302之间则只能发生z轴方向的相对运动,并且悬挂支架301所挂载的轮毂电机4和车轮5只能沿z轴发生直线位移,这便使得减震过程中对轴向电机2不会产生额外的附加转矩,进而提高驱动轮的稳定性。
21.减震组件包括减震器309,减震器309的一端固定连接在悬挂支架301上,减震器309的另一端固定连接在悬挂底板302上。在本实施例中,支定组件内设有一对减震器309。
22.减震器309的设置,不仅可以避免减震过程中地面对轴向电机2的冲击,而且使得减震过程中车轮5不会产生相对转向轴的位移。
23.本发明的一种结构轻巧的自主转向驱动轮的工作原理如下:通过安装支架1,用螺栓连接的固定方式,将该自主转向驱动轮安装在电动轮椅上,安装支架1和悬挂支架301上设有中空的的通孔,通孔相连形成穿线孔101,控制系统的电缆穿过穿线孔101与轮毂电机4相连。控制系统控制轴向电机2动作便可带动着悬挂支架301转动,进而实现驱动轮自主转向操作。控制系统控制轮毂电机4动作,进而使得车轮5转动,便可行进。
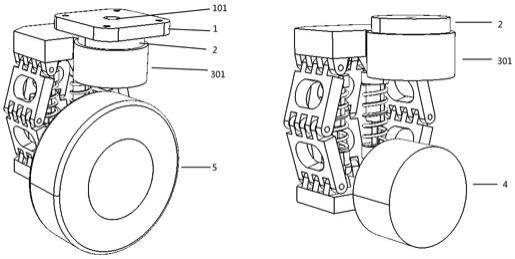
24.实施例2如图3-4所示,实施例2是在实施例1的基础上对技术方案的进一步优化,具体的内容技术方案为悬挂支架301的下方两侧对称设有支定组件和减震组件,与之相对应的,悬挂底板302为双边支架,两个悬挂底板302分别对称安装在各侧的支定组件和减震组件上,车轮5的中轴转动连接在两个悬挂底板302上,相对于实施例1中的自主转向驱动轮,本实施例中的自主转向驱动轮,通过在车轮5的两侧对称分设支定组件和减震组件的方式,可保证车轮5两侧重力一致,从而使得车轮5行进方式更加平稳,避免减震过程中产生地面对单侧的轴向电机2的冲击,从而造成自主转向驱动轮运行不稳定的情况发生,进一步的增加使用者的舒适度。
25.涉及到电路、电子元器件和控制模块均为现有技术,本领域技术人员完全可以实
现,无需赘言,本发明保护的内容也不涉及对于软件和方法的改进。
26.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。