技术特征:
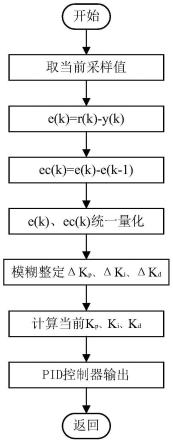
1.一种基于pid算法的自动引导车路径自动调整方法,其特征在于,包括:根据自动引导车运行速度,设置采样周期;根据本采样周期和上一采样周期的
△
s、k
p
、k
i
、k
d
分别计算
△
s
c
、
△
k
p
、
△
k
i
、
△
k
d
,其中,
△
s为自动引导车实际姿态与设定姿态的差值,
△
s
c
为
△
s的变化速率,
△
k
p
、
△
k
i
、
△
k
d
分别为k
p
、k
i
、k
d
的变化量,k
p
、k
i
、k
d
为pid调节参数;根据自动引导车在实际运行中左右两方向所允许的最大偏差范围,对
△
s的变化论域进行确定,并将
△
s的变化论域划分为多个语义变量;根据自动引导车在实际运行允许的
△
s变化速率确定
△
s
c
的变化论域,并将
△
s
c
的变化论域划分为多个语义变量;根据调试经验确定
△
k
p
、
△
k
i
、
△
k
d
的变化论域,并分别将
△
k
p
、
△
k
i
、
△
k
d
的变化论域划分为多个语义变量;将
△
s、
△
s
c
、
△
k
p
、
△
k
i
、
△
k
d
量化至统一量化论域中,并确定各变量的比例因子;根据
△
s、
△
s
c
的语义变量建立关于
△
k
p
、
△
k
i
、
△
k
d
变化的三张规则表;确定隶属度函数,描述变量属于各个语义变量的程度,即隶属度;通过
△
s、
△
s
c
量化后的值查询规则表确定
△
k
p
、
△
k
i
、
△
k
d
语义子集;根据所述隶属度计算
△
k
p
、
△
k
i
、
△
k
d
语义子集的隶属度;根据
△
k
p
、
△
k
i
、
△
k
d
语义子集和
△
k
p
、
△
k
i
、
△
k
d
语义子集的隶属度计算
△
k
p
、
△
k
i
、
△
k
d
的清晰值;将
△
k
p
、
△
k
i
、
△
k
d
的清晰值按照各自的比例因子进行缩放得出k
p
、k
i
、k
d
的变化量,根据所述变化量计算当前k
p
、k
i
、k
d
,将当前k
p
、k
i
、k
d
作为pid运算的输出。2.根据权利要求1所述的基于pid算法的自动引导车路径自动调整方法,其特征在于,所述根据本采样周期和上一采样周期的
△
s计算
△
s
c
包括:获取自动引导车实际姿态与设定姿态,将自动引导车实际姿态与设定姿态进行比较得到实际姿态与设定姿态的差值
△
s;获取自动引导车上一采样周期的
△
s并与本采样周期的
△
s进行比较,计算
△
s的变化速率
△
s
c
;所述
△
k
p
、
△
k
i
、
△
k
d
以与
△
s
c
相同的原理进行计算。3.根据权利要求1所述的基于pid算法的自动引导车路径自动调整方法,其特征在于,所述
△
s、
△
s
c
、
△
k
p
、
△
k
i
、
△
k
d
的变化论域均被划分为七个语义变量:右偏大、右偏中、右偏小、不偏、左偏小、左偏中、左偏大。4.根据权利要求1所述的基于pid算法的自动引导车路径自动调整方法,其特征在于,所述
△
s、
△
s
c
、
△
k
p
、
△
k
i
、
△
k
d
量化至统一量化论域[-3,-2,-1,0,1,2,3]中,各变量的比例因子分为为:因子分为为:因子分为为:
技术总结
本发明涉及移动机器人技术领域,具体涉及一种基于PID算法的自动引导车路径自动调整方法。包括对自动引导车实际姿态与设定姿态进行对比的差值,得出实际姿态的多个语义变量,又根据对比的差值变化的速率得出了多个语义变量,并将两者的语义变量进行排列组成判断规则,对应每个判断结果将PID三个参数K
技术研发人员:陈思林 史鹏 周怡 冯肖 方鹏 付军 胡港 孟繁凯 严思香
受保护的技术使用者:湖北三江航天万峰科技发展有限公司
技术研发日:2022.08.30
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。