1.本发明涉及网络攻击和网络控制系统稳定性的技术领域,尤其是指一种基于切换系统的重放攻击下网络控制系统稳定方法。
背景技术:
2.近年来网络安全问题受到了越来越多的关注,通过共享网络传输的数据很容易被攻击者利用。由于网络控制系统中传感器、控制器、执行器间通过共享网络连接,网络攻击的出现会恶意破坏网络控制系统稳定性。重放攻击作为黑客常用攻击方式,通过重复发送一个主机已接收过的包,来达到欺骗系统,破坏系统稳定性的目的,严重危害了网络控制系统安全。
3.网络攻击通常具有随机性,在控制系统建模的方法中,通常把网络攻击建模成随机概率分布或马尔可夫过程。主要有:1、基于离散随机控制系统稳定方法,这类方法构建随机系统的李亚普诺夫函数,通过求解李亚普诺夫函数期望分析系统稳定性条件,但此类方法模型复杂,计算量大;2、基于马尔可夫过程分析方法,这类方法研究系统马尔可夫链,进而判断pdmp的稳定性,但得到的系统稳定条件具有一定的局限性。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点与不足,提出了一种基于切换系统的重放攻击下网络控制系统稳定方法,将由于网络攻击引入的随机变量转化为系统在有限个子系统间切换,避免了直接求解含随机变量的系统,减少了计算量,拓宽了切换系统思想的应用。
5.为实现上述目的,本发明所提供的技术方案为:基于切换系统的重放攻击下网络控制系统稳定方法,包括以下步骤:
6.1)由于传感器采用时间驱动模式、控制器与执行器采用事件驱动模式,根据系统在一个传感器周期内遭受重放攻击时执行器维持上一个采样周期输入的原则,将遭受重放攻击的网络控制系统转换为变周期采样网络控制系统,建立重放攻击下网络控制系统连续时间状态空间模型;
7.2)将系统成功完成一次数据传输至下一次成功完成数据传输的时间间隔视为一个采样周期,根据变周期离散法,将重放攻击下网络控制系统连续时间状态空间模型稳定性问题转化为有限子系统的离散时间切换系统稳定性问题;
8.3)利用多李雅普诺夫函数法与平均驻留时间,确定切换系统指数稳定与系统指数衰减率。
9.进一步,在步骤1)中,传感器采用时间驱动模式,控制器与执行器采用事件驱动模式,传感器采样周期为h;在一个传感器采样周期h内,无论重放攻击出现在“传感器—控制器通道”还是“控制器—执行器通道”,其结果都是使得执行器输入未更新而维持上一采样周期的输入;若在间隔[ti,tj),i<j内发生了n次连续重放攻击,则等价于系统在间隔[ti,
tj)内的采样周期为(n 1)h,其中ti、tj为传感器采样时刻,n为任意非负整数;将遭受重放攻击的网络控制系统转换为变周期采样网络控制系统,建立重放攻击下网络控制系统连续时间状态空间模型,表示为:
[0010][0011]
式中,i为任意大于等于0的整数,t为时间变量,t
i 1
为系统第i 1次采样时刻,x(t)为系统状态向量,为系统状态向量的微分,a
p
为系统矩阵,b
p
为系统输入矩阵,u(t)为系统控制输入,k为控制器增益,x(ti)为ti时刻系统状态向量。
[0012]
进一步,所述步骤2)包括以下步骤:
[0013]
2.1)将系统成功完成一次数据传输至下一次成功完成数据传输的时间间隔视为一个采样周期,采样周期的大小随着系统连续遭受重放攻击的次数增大而增大,根据变周期离散法,将重放攻击下网络控制系统连续时间状态空间模型按照采样周期hi进行离散:
[0014]
x(t
i 1
)=a(hi)x(ti) b(hi)u(ti),i=0,1,2
…
[0015]
式中,i为任意大于等于0的整数,ti、t
i 1
为系统第i次与第i 1次采样时刻,x(ti)为ti时刻系统状态向量,x(t
i 1
)为t
i 1
时刻系统状态向量,u(ti)为ti时刻系统控制输入,a(hi)为hi采样周期的系统矩阵,b(hi)为hi采样周期的系统输入矩阵,其定义为:
[0016][0017][0018]
式中,a
p
为系统矩阵,b
p
为系统输入矩阵,τ为积分变量,采样周期hi为系统成功完成两次数据传输的时间间隔,采样周期hi是时变且有上界的,其定义为:
[0019]hi
=t
i 1-ti[0020]hi
=n
ih[0021]
式中,h为传感器采样周期,ni为两次成功完成数据传输所间隔的传感器采样次数,ni∈{1,...,d 1},其中d为网络控制系统连续发生重放攻击次数的上界,d为正整数;
[0022]
2.2)a(hi)与b(hi)的大小由采样周期hi决定,每一个采样周期都看成一个相互独立的子系统,利用切换系统的思想将含有随机变量hi的变周期采样网络控制系统转化为含有限个子系统的离散时间切换系统,整个网络控制系统按照设定规律在各个子系统间切换:
[0023][0024]
式中,为第i个子系统,为第i个子系统的状态转移矩阵,其定义为:
[0025][0026]
式中,为分段连续切换信号,表示在ti时刻系统切换至第i个子系统,表示没有受到重放攻击的子系统出现,表示连续受到重放攻击q-1次的子系统出现,其中q∈[2,d 1],q为正整数,为第i个子系统的系统矩阵,为第i个子系统的系统输入矩阵,k为控制器增益。
[0027]
进一步,在步骤3)中,使用多李雅普诺夫函数法是指对含有限个子系统的切换系统,分别找到使得每个子系统指数稳定的李雅普诺夫函数,其定义为:
[0028][0029][0030][0031]
式中,i为任意大于等于0的整数,ti、t
i 1
为系统第i次与第i 1次采样时刻,为分段连续切换信号,表示在ti时刻系统切换至第i个子系统,为第i个子系统的李雅普诺夫函数在ti时刻的函数值,为第i个子系统的李雅普诺夫函数在t
i 1
时刻的函数值,x(ti)为ti时刻系统状态向量,x
t
(ti)为ti时刻系统状态向量的转置,为第i个子系统的李雅普诺夫函数参数,为正定矩阵,为第i 1个子系统的李雅普诺夫函数参数,为正定矩阵,λi为第i个子系统的衰减指标,λi>1,μ为切换系统衰减指标,μ≥1;
[0032]
通过递推法,得到整个切换系统的衰减轨迹,使得切换系统指数衰减的李雅普诺夫函数需满足:
[0033][0034]
式中,t0为系统初始时刻,m为系统切换的次数,tm为系统切换至第m个系统的时间,为分段连续切换信号,表示在tm时刻系统切换至第m个子系统,为第m个子系统的李雅普诺夫函数在tm时刻的值,为切换系统初始时刻停留子系统的李雅普诺夫函数在t0时刻的值,为[t0,tm)时间内系统的切换次数,d为网络控制系统连续发生重放攻击次数的上界,d为正整数,s∈{1,
…
,d 1},λs为连续发生重放攻击s次的子系统的衰减率,rs为连续发生重放攻击s次的子系统出现的概率;
[0035]
平均驻留时间指的是整个切换系统在每个子系统的平均驻留时间,通过建立系统衰减率与系统在各个子系统平均驻留时间的关系,找到能使得系统指数稳定的最小平均驻留时间τa,满足:
[0036][0037]
式中,λ为切换系统衰减指标,只要整个切换系统在各个子系统的平均驻留时间大于τa,则切换系统指数稳定,系统指数衰减率ρ为:
[0038][0039]
本发明与现有技术相比,具有如下优点与有益效果:
[0040]
1、本发明首次将切换系统的思想应用于重放攻击下网络控制系统稳定性分析,避免了随机系统分析法系统建模复杂,计算量大的缺点。
[0041]
2、本发明与公共李雅普诺夫函数法相比,系统稳定性判定条件更具有普遍性。
[0042]
3、本发明方法在网络攻击下网络控制系统稳定性分析中具有广泛的使用空间,建模简单、适应性强,具有广阔的应用前景。
附图说明
[0043]
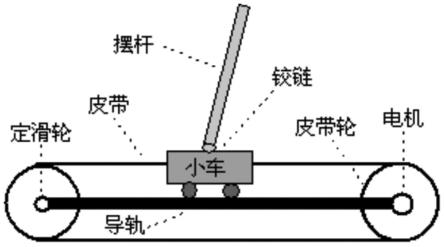
图1为本发明所使用的重放攻击下一级直线倒立摆系统实例示意图。
具体实施方式
[0044]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0045]
本实施例提供了一种基于切换系统的重放攻击下网络控制系统稳定方法,使用了多李雅普诺夫函数法与平均驻留时间,其包括以下步骤:
[0046]
1)传感器采用时间驱动模式,控制器与执行器采用事件驱动模式,传感器采样周期为h;在一个传感器采样周期h内,无论重放攻击出现在“传感器—控制器通道”还是“控制器—执行器通道”,其结果都是使得执行器输入未更新而维持上一采样周期的输入;若在间隔[ti,tj),i<j内发生了n次连续重放攻击,则等价于系统在间隔[ti,tj)内的采样周期为(n 1)h,其中ti、tj为传感器采样时刻,n为任意非负整数;将遭受重放攻击的网络控制系统转换为变周期采样网络控制系统,建立重放攻击下网络控制系统连续时间状态空间模型,表示为:
[0047][0048]
其中,i为任意大于等于0的整数,t为时间变量,t
i 1
为系统第i 1次采样时刻,x(t)为系统状态向量,为系统状态向量的微分,a
p
为系统矩阵,b
p
为系统输入矩阵,u(t)为系统控制输入,k为控制器增益,x(ti)为ti时刻系统状态向量。如图1所示的一级直线倒立摆系统,其中小车的质量m=1.32kg,摆杆的质量m=0.109kg,小车与导轨摩擦系数b=0.1n/m/s,重力加速度g=9.8m/s2,摆杆转动轴心到杆质心的长度l=0.25m,摆杆质量i=0.0023kg.m2,通过分析小车与摆杆所受力,可得一级倒立摆系统状态空间模型:
[0049][0050]
其中系统矩阵系统输入矩阵控制器增益k=[134.8981 74.2585 206.5828 38.0107]。
[0051]
2)将系统成功完成一次数据传输至下一次成功完成数据传输的时间间隔视为一个采样周期,根据变周期离散法,将重放攻击下网络控制系统连续时间状态空间模型稳定性问题转化为有限子系统的离散时间切换系统稳定性问题,具体如下:
[0052]
将重放攻击下网络控制系统连续时间状态空间模型,按照不同周期进行离散,再利用切换系统的思想将含有随机变量hi的变周期采样网络控制系统转化为含有限个子系
统的离散时间切换系统,包括以下步骤:
[0053]
2.1)将系统成功完成一次数据传输至下一次成功完成数据传输的时间间隔视为一个采样周期,采样周期的大小随着系统连续遭受重放攻击的次数增大而增大。根据变周期离散法,将重放攻击下网络控制系统连续时间状态空间模型按照采样周期hi进行离散:
[0054]
x(t
i 1
)=a(hi)x(ti) b(hi)u(ti),i=0,1,2
…
[0055]
式中,i为任意大于等于0的整数,ti、t
i 1
为系统第i次与第i 1次采样时刻,x(ti)为ti时刻系统状态向量,x(t
i 1
)为t
i 1
时刻系统状态向量,u(ti)为ti时刻系统控制输入,a(hi)为hi采样周期的系统矩阵,b(hi)为hi采样周期的系统输入矩阵,其定义为:
[0056][0057][0058]
其中,a
p
为系统矩阵,b
p
为系统输入矩阵,τ为积分变量,采样周期hi为系统成功完成两次数据传输的时间间隔,采样周期hi是时变且有上界的,其定义为:
[0059]hi
=t
i 1-ti[0060]hi
=n
ih[0061]
其中,h为传感器采样周期,ni为两次成功完成数据传输所间隔的传感器采样次数,ni∈{1,...,d 1},其中d为网络控制系统连续发生重放攻击次数的上界,d为正整数;如图1所示一级直线倒立摆系统的传感器采样周期h=10ms,系统连续发生重放攻击次数的上界。
[0062]
2.2)a(hi)与b(hi)的大小由采样周期hi决定,每一个采样周期都看成一个相互独立的子系统,利用切换系统的思想将含有随机变量hi的变周期采样网络控制系统转化为含有限个子系统的离散时间切换系统,整个网络控制系统按照设定规律在各个子系统间切换:
[0063][0064]
其中,为第i个子系统,为第i个子系统的状态转移矩阵,其定义为:
[0065][0066]
其中,为分段连续切换信号,表示在ti时刻系统切换至第i个子系统,表示没有受到重放攻击的子系统出现,表示连续受到重放攻击q-1次的子系统出现,其中q∈[2,d 1],q为正整数,为第i个子系统的系统矩阵,为第i个子系统的系统输入矩阵,k为控制器增益。如图1所示闭环网络化倒立系统可由一个具有四个子系统的离散时间切换系统描述:
[0067]
[0068]
其中,a
p
为系统矩阵,i∈[1,4],i为正整数,j为求和变量,b
p
为系统输入矩阵。
[0069]
3)利用多李雅普诺夫函数法与平均驻留时间,确定切换系统指数稳定与系统指数衰减率,具体如下:
[0070]
使用多李雅普诺夫函数法是指对含有限个子系统的切换系统,分别找到使得每个子系统指数稳定的李雅普诺夫函数,其定义为:
[0071][0072][0073][0074]
其中,i为任意大于等于0的整数,ti、t
i 1
为系统第i次与第i 1次采样时刻,为分段连续切换信号,表示在ti时刻系统切换至第i个子系统,为第i个子系统的李雅普诺夫函数在ti时刻的函数值,为第i个子系统的李雅普诺夫函数在t
i 1
时刻的函数值,x(ti)为ti时刻系统状态向量,x
t
(ti)为ti时刻系统状态向量的转置,为第i个子系统的李雅普诺夫函数参数,为正定矩阵,为第i 1个子系统的李雅普诺夫函数参数,为正定矩阵,λi为第i个子系统的衰减指标,λi>1,μ为切换系统衰减指标,μ>1;
[0075]
通过递推法,得到整个切换系统的衰减轨迹,使得切换系统指数衰减的李雅普诺夫函数需满足:
[0076][0077]
其中,t0为系统初始时刻,m为系统切换的次数,tm为系统切换至第m个系统的时间,为分段连续切换信号,表示在tm时刻系统切换至第m个子系统,为第m个子系统的李雅普诺夫函数在tm时刻的值,为切换系统初始时刻停留子系统的李雅普诺夫函数在t0时刻的值,为[t0,tm)时间内系统的切换次数,d为网络控制系统连续发生重放攻击次数的上界,d为正整数,s∈{1,
…
,d 1},λs为连续发生重放攻击s次的子系统的衰减率,rs为连续发生重放攻击s次的子系统出现的概率;
[0078]
平均驻留时间指的是整个切换系统在每个子系统的平均驻留时间,通过建立系统
衰减率与系统在各个子系统平均驻留时间的关系,找到能使得系统指数稳定的最小平均驻留时间τa,满足:
[0079][0080]
其中,λ为切换系统衰减指标,只要整个切换系统在各个子系统的平均驻留时间大于τa,则切换系统指数稳定,系统指数衰减率ρ为:
[0081][0082]
如图1所示的一级直线倒立摆系统取m=10,利用一维搜索法取尽可能大的子系统衰减率得λ1=1.035,λ2=λ3=1.030,λ4=1.020,μ=1.05,λ=1.030,计算得最小平均驻留时间τa=0.8ms,只要整个切换系统在各个子系统的平均驻留时间大于等于0.8ms,系统就是指数稳定的且系统衰减率ρ=1.01。
[0083]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。