1.本发明专利属于智能车领域,具体涉及一种通过电机外置磁悬编码器测速方式实现控制的一种迷宫智能车。
背景技术:
2.随着科技提升,智慧型智能车将更多的参与人类生活,迷宫智能车作为智慧智能车的新型产物,其应用与研究价值日益风靡全球,对其快速性与灵活性有着更高的要求,传统的智能车的电机测速方式大多采用霍尔编码器和电机一同旋转,但对于迷宫环境,智能车电机较小且高速运行,集成高精度编码器设计成本较高,且实际设计中较为复杂,因此,一种简便可实现的对于迷宫中高速旋转电机测速显得尤为重要。
技术实现要素:
3.针对上述问题,本发明的目的是提供一种基于电机外置磁悬编码器测速的迷宫智能车,运行中通过红外收发传感器获取迷宫墙壁信息,通过外置的磁编码器采集高速电机运行的速度,进而控制左右电机的转速和转向,完成智能车迷宫任务。
4.为实现上述目的,本发明采用以下技术方案。
5.一种基于电机外置磁悬编码器测速的迷宫智能车,包括pcb电路底盘1、核心控制器2、编码器速度检测电路、电源稳压电路模块、陀螺仪角度控制模块、电机驱动模块、红外传感器模块、蓝牙上位机通信模块。
6.所述pcb电路底盘1用以连接核心控制器2、红外发射组件7、红外接收组件8、左右两侧机械架、磁传感器组件4、蓝牙通信组件5,所述主控制器2对左右两侧电机、四组红外发射接收组件、磁传感器组件4、蓝牙通信组件5进行控制,左右两侧电机控制轮子转动,红外发射接收组件用以检测障碍物,并对电机运行状态进行纠正,使智能车运行在两侧迷宫格的中间位置,磁传感器组件4和旋转磁铁3用来获取智能车运行的速度。
7.所述核心控制器2、红外发射组件7、红外接收组件8、蓝牙通信组件5、陀螺仪模块9、磁传感器组件4的电压由电源稳压模块供应,确保电压恒定。
8.所述陀螺仪角度控制模块通过排针安插在pcb电路底盘1上,由5v电源供给电压,和主控制器通过模拟iic接口进行通信,获取智能车的旋转角度,控制智能车的转弯。
9.所述左侧机械架12、右侧磁传感器组件9垂直固定在pcb电路底盘1上,右侧电机组件、左侧磁传感器组件连接关系相同。
10.所述右侧旋转磁铁3安装在轮子11上并和轮子4一起旋转,右侧旋转磁铁 3水平截面平行于左侧磁传感器组件4且按照设定的距离安装,左侧旋转磁铁与磁传感器组件连接关系同右侧旋转磁铁连接关系相同。
附图说明
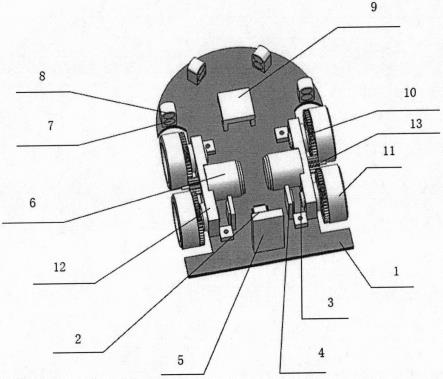
11.图1是本发明的外观结构示意立体图;
12.图2是本发明电路控制结构图;
13.图3是本发明整体完成的任务流程图;
14.图4是本发明在迷宫中的行驶状态图;
15.图5是本发明速度控制闭环结构图;
16.图6是本发明转弯动作示意图。
具体实施方式
17.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
18.实施例1:
19.请参照图1、2所示,一种基于电机外置磁悬编码器测速的迷宫智能车机械结构和控制系统,包括pcb电路底盘1、主控制器2、左侧电机6和右侧电机、轮子11、红外发射组件6、红外接收组件7、左侧机械架12和右侧机械架、右侧旋转磁铁3和左侧旋转磁铁、右侧磁传感器组件4和左侧磁传感器组件、蓝牙通信组件5、陀螺仪传感器组件9。一种基于电机外置磁悬编码器测速的迷宫智能车,核心控制器2接在pcb电路底盘1上,并通过pcb电路地盘1连接到左右两侧电机、红外传感器、陀螺仪等,对智能车进行精确的位置和速度控制,左侧机械架12固定在pcb电路底盘1上面,右侧与左侧对称,蓝牙组件5 安插在pcb电路底盘1上面,负责对智能车的行驶状态进行监控,实时向上位机传输智能车的位置、速度和其他的信息,也可以通过接受上位机发送的指令来改变迷宫智能车的运行轨迹。红外发射组件8和红外接收组件7安装在pcb电路底盘1上,可以检测是否有墙壁,并且在智能车行进过程中对智能车进行姿态矫正,使其行驶在迷宫中间的位置.四个轮子分别安装在左侧机械架12和右侧机械架上,左侧电机组件6通过螺丝安装在左侧机械架12上,右侧与左侧对称安装,控制智能车的行进,旋转磁铁组件3固定在轮子11上,同轮子一同旋转,磁传感器组件4固定在pcb电路底盘1上面,磁传感器组件固定和旋转磁铁垂直放置,且距离固定,磁铁组件跟随轮子一起旋转,并和磁传感器组件产生巨磁阻效应,来采集电机的运行速度。
20.实施例2:
21.请参照图3所示,一种基于电机外置磁悬编码器测速的迷宫智能车进行的工作流程,包括对主控制器的运行端口进行初始化操作,操作者按下开始按钮,等待几秒延时,电机启动,智能车开始前进,进行对整个迷宫地图的搜索,记录搜索过的每个迷宫墙壁的信息,并且通过蓝牙实时向上位机发送数据,直至到达迷宫终点坐标,智能车开始返回起点,准备冲刺,通过对记录的迷宫墙壁信息,得到一条通向终点的最优路径,并以最快的速度冲向终点,再返回到起点,完成一次迷宫任务。
22.实施例3:
23.请参照图4所示,一种基于电机外置磁悬编码器测速的迷宫智能车的行驶状态:通过四组红外收发传感器组件检测每一格迷宫的墙壁信息,确定是否有路,通过左前方红外和右前方红外来检测前方的墙壁信息,通过左侧红外检测左边墙壁的信息,右侧红外检测右边墙壁的信息,通过控制器驱动左电机和右电机组件旋转,智能车向前行驶。
24.实施例4:
25.磁编码器速度检测:智能车向前行进过程中,轮子4带动左旋转磁铁组件 81和右旋转磁铁组件82同步旋转,左旋转磁铁组件81和右旋转磁铁组件82分别和左侧磁传感器组
件91、右侧磁传感器组件92发生磁阻尼效应,产生脉冲信号,主控制器2通过定时器捕获功能接受脉冲信号,形成反馈速度。
26.实施例5:
27.请参照图5所示,一种基于电机外置磁悬编码器测速的迷宫智能车的控制方式:智能车的速度是根据反馈回来的直线速度和角速度,进行偏差计算,得到直线速度误差和旋转速度误差,再根据这两个偏差信号分别进行pi控制得到对应的控制信号,最后通过电机驱动器将控制信号转换为pwm波对两个电机进行控制。采用这种控制方式进行电机控制,只需要给定一个直行速度和一个旋转速度,就能对两个电机进行控制。
28.实施例6:
29.请参照图6所示,一种基于电机外置磁悬编码器测速的迷宫智能车的转弯实现:通过红外传感器组件6检测智能车当前位置的相对左或者相对右方向有路,控制器驱动左电机组件31和右电机组件32,一个电机加速,一个电机减速形成速度差,进而控制左转和右转。
30.实施例7:
31.智能车和上位机通信:智能车搜索终点的过程中会实时产生回馈速度,通过蓝牙通信组件10,可将智能车行进中的直线速度或者角速度实时反馈给上位机,并通过上位机接收,形成实时速度曲线,检测智能车的运行状态。同时,上位机可以向智能车发送指令,更改智能车在迷宫中的目标点。
技术特征:
1.一种基于电机外置磁悬编码器测速的迷宫智能车,包括pcb电路底盘、核心控制器、编码器速度检测电路、电源稳压电路模块、陀螺仪角度控制模块、电机驱动模块、红外传感器模块、蓝牙上位机通信模块。其中,所述所述pcb电路底盘用以连接核心控制器、红外传感器模块、编码器速度检测电路、蓝牙上位机通信模块。2.根据权利要求1所述的一种基于电机外置磁悬编码器测速的迷宫智能车,其特征在于,所述陀螺仪组件为九轴数字陀螺仪,可以直接输出角度量,和核心控制器的通信方式为iic通信,能够将数据量快速传到主控芯片,精准控制智能车的转弯角度,并且采用插拔式,用排针直接插在pcb电路板上,能够随时方便进行陀螺仪的维修和更换。3.根据权利要求1所述的一种基于电机外置磁悬编码器测速的迷宫智能车,其特征在于,所述右侧旋转磁铁3安装在轮子11上并和轮子4一起旋转,右侧旋转磁铁3水平截面平行于左侧磁传感器组件4且按照设定的距离安装,左侧旋转磁铁与磁传感器组件连接关系同右侧旋转磁铁连接关系相同。4.根据权利要求1所述的一种基于电机外置磁悬编码器测速的迷宫智能车,其特征在于,所述智能车的运动控制模块,速度控制方式采用交叉双闭环pid控制,将直线速度和角速度的正反馈作用到左电机上,将直线速度和角速度负反馈作用到左电机上,直线速度采用左轮速度与右轮速度和除以2,角速度采用左轮速度减去右轮的速度再除以2,用速度的设定量减去编码器的回馈量,误差进行pid控制。5.根据权利要求1所述的一种基于电机外置磁悬编码器测速的迷宫智能车,其特征在于,智能车的姿态矫正方式采用红外矫正与陀螺仪矫正相结合的方式,智能车位于迷宫的中心靠左的位置时,采用红外矫正,当智能车行进过程中角度发生偏移的时候,采用陀螺仪的矫正方式,对误差进行pid修正,防止误差太大撞到墙壁,使智能车始终保持行驶在迷宫中间位置并和两边的墙壁平行的状态行进。
技术总结
本发明涉及一种基于电机外置磁悬编码器测速的迷宫智能车,通过在迷宫中获取墙壁信息,寻找最优路径到达目的地,智能车的主控芯片为STM32F103,通过4组接受和发送红外传感器检测迷宫的墙壁信息,控制左右两个直流电机进行车的转弯和前进,进而对障碍物进行躲避,使智能车快速精准的到达设定的位置,核心控制器2接在PCB电路底盘1上,并通过PCB电路地盘1连接到左右两侧电机、红外传感器、陀螺仪等,蓝牙组件5安插在PCB电路底盘1上面,负责实时向上位机传输智能车的位置、速度和其他的信息,也可以通过接受上位机发送的指令来改变迷宫智能车的运行轨迹。本智能车是学生进行智能车学习开发的良好平台,同时也具有很好的应用研究价值。价值。价值。
技术研发人员:袁臣虎 张赛 侯东旭
受保护的技术使用者:天津工业大学
技术研发日:2022.09.28
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。