基于fpga的多自由度磁悬浮轴承控制方法及系统
技术领域
1.本发明涉及电磁轴承控制技术领域,具体涉及一种基于fpga的多自由度磁悬浮轴承控制方法及系统。
背景技术:
2.目前广泛使用的电磁轴承控制系统大多数基于mcu或者dsp等采用纯软件的方法实现,但是基于软件的方法为顺序执行,易产生滞后,降低了电磁轴承控制的实时性继而降低了整机性能。因此,出现了基于fpga的纯硬件逻辑的方法实现,然而现有的fpga电磁轴承并行控制系统中,各电磁轴承分别利用各自的数据采集电路、指令输入电路、磁轴承控制运算电路独立进行逻辑实现并行控制,各电磁轴承之间互不影响,这种方法需要重复占用fpga的计算逻辑,造成资源浪费,芯片成本增加,对fpga芯片的要求较高。要求逻辑单元量大,乘法器等资源多的fpga芯片,造成芯片成本增加,对fpga芯片要求也较高。
3.现有技术中如中国专利cn101931371a公开了一种以fpga芯片作为核心处理器的磁悬浮轴承控制功放一体化系统,其控制方式如图1所示,将磁悬浮轴承上的位移传感器提供的转子位移反馈信号和线圈电流传感器提供的线圈电流反馈信号转化为数字信号并送入到fpga控制电路,在其内对数字信号进行数字标定及悬浮pid控制算法、电流校正算法和三电平脉冲宽度调制算法运算,生成调制pwm信号控制线圈电流的大小,这种方法分别利用各自的数据采集电路、磁轴承控制运算电路独立进行逻辑实现并行控制,重复占用fpga的计算逻辑,造成资源浪费。
技术实现要素:
4.为解决现有技术技术对各磁轴承进行并行控制导致的fpga逻辑资源浪费的技术问题,本发明提供一种基于fpga的多自由度磁悬浮轴承控制方法及系统,具体采用如下技术方案:
5.一种基于fpga的多自由度磁悬浮轴承控制方法,其中使用一个电磁线圈和一个永久磁体控制磁轴承转轴进行悬浮,包括如下步骤:
6.s1、获得在n个自由度方向的磁轴承位移{fd1、fd2、fd3…
fdn}和磁轴承电流{fi1、fi2…
fin},其中n为1~6的整数;
7.s2、第一自由度磁轴承位置环运算:
8.将第一自由度磁轴承的位移给定值与第一自由度磁轴承位移fd1做差后输入至位置环pid控制器,得到第一自由度磁轴承电流给定值;
9.s3、第一自由度磁轴承电流环运算和脉宽调整:
10.将第一自由度磁轴承电流fi1与第一自由度磁轴承电流给定值做差后输入至电流环pi控制器,并经过脉冲宽度调制后得到第一自由度磁轴承pwm调制信号p1;
11.s4、相邻自由度磁轴承位置环运算和电流环运算:
12.当电流环pi控制器对第一自由度磁轴承进行运算时,则同时将第二自由度磁轴承
的位移给定值与第二自由度磁轴承位移fd2做差后输入至位置环pid控制器,得到第二自由度磁轴承电流给定值;当脉冲宽度调制生成第一自由度磁轴承pwm调制信号时,则同时将第二自由度磁轴承电流fi2与第二自由度磁轴承电流给定值做差后输入至电流环pi控制器,同时将第三自由度磁轴承的位移给定值与第三自由度磁轴承位移fd3做差后输入至位置环pid控制器,得到第三自由度磁轴承电流给定值;
13.s5、根据s4的方式,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承pwm调制信号组合{p1、p2…
pn};
14.s6、根据磁轴承pwm调制信号组合{p1、p2…
pn}同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制。
15.本发明还提供一种基于fpga的多自由度磁悬浮轴承控制方法,其中使用两个电磁线圈控制磁轴承转轴进行悬浮,一个磁轴承位移信号对应两个磁轴承电流信号。
16.优选地,所述多自由度为五自由度,分别为前向x、前向y、后向x、后向y和轴向z。
17.还提供一种采用上述多自由度磁悬浮轴承控制方法的系统,该系统设置在fpga上,所述系统包括:
18.并行设置的n个磁轴承位移采样模块和n个磁轴承电流采样模块,所述磁轴承位移采样模块用于获取n个自由度方向的磁轴承位移;所述磁轴承电流采样模块用于获取n个自由度方向的磁轴承电流;
19.一个磁轴承运算模块,该磁轴承运算模块用于接收磁轴承位移和磁轴承电流信号,并依次进行n个自由度方向的磁轴承位移运算和磁轴承电流运算,通过脉宽调整得到磁轴承pwm调制信号组合;以及
20.并行设置的n个pwm信号输出模块和n个功率放大器,所述pwm信号输出模块用于将pwm调制信号组合输出至功率放大器控制磁悬浮轴承的电流大小。
21.还提供一种采用上述多自由度磁悬浮轴承控制方法的系统,该系统设置在fpga上,其中磁轴承电流采样模块为2n个,功率放大器为为n或2n个。
22.进一步地,所述磁轴承运算模块包括位置环pid控制器、电流环pi控制器以及三电平脉冲宽度调制算法模块;
23.所述位置环pid控制器能够将磁轴承的位移给定值与磁轴承位移做差后进行位移环运算得到磁轴承电流给定值;
24.所述电流环pi控制器能够将磁轴承电流与磁轴承电流给定值做差后进行电流环运算;
25.所述三电平脉冲宽度调制算法模块将电流环pi控制器的运算结果进行脉冲宽度调制后得到轴承pwm调制信号。
26.由以上技术方案可知,本发明对各功能模块进行调度优化,使得多自由度磁轴承控制使用一路磁轴承控制运算模块,与现有技术方案比,很好的控制了硬件成本,同时pwm信号同时输出较好的保证了多自由度磁轴承控制的同步性,对功能模块进行分时复用,使整个系统在节约逻辑资源的同时保证运算速度。
附图说明
27.图1为现有技术系统模块的结构示意图;
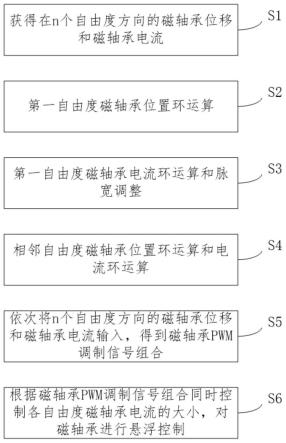
28.图2为本发明多自由度磁悬浮轴承控制方法的流程图;
29.图3为本发明中磁轴承运算模块的运算逻辑示意图;
30.图4为本发明实施例五自由度磁轴承运算原理图;
31.图5为本发明多自由度磁悬浮轴承控制系统的结构示意图。
具体实施方式
32.下面结合附图对本发明的一种优选实施方式作详细的说明。
33.本发明的多自由度磁悬浮轴承控制方法是基于fpga,当然也可以采用dsp fpga等其他替代方案,如位置环在dsp执行,电流环在fpga中运行,电流环控制方式使用本发明公开的磁悬浮轴承控制方法。
34.本发明是将fpga中的三个功能模块:位置环pid控制器、电流环pi控制器、三电平脉冲宽度调制算法模块,按照分时复用的思想构成“流水结构”,也就是要求同一个模块在同一个时刻只能进行某一轴承的控制运算,又因为构成流水结构的3个功能模块所需要的执行时间不尽相同,因此,流水线中的每一个功能模块对某一轴承的运算启动前必须以前一个功能模块对磁轴承的运算结束为结束条件。就可以实现多自由度磁轴承控制使用一路磁轴承控制运算模块,使整个系统在节约逻辑资源的同时保证运算速度。
35.在磁轴承控制中分为主动式、被动式和混合式结构,其中被动式磁轴承没有主动电子控制系统,是使用永久磁体将磁轴承转轴悬浮起来;主动式结构是利用可控磁力将磁轴承转轴悬浮起来,其中使用两个电磁线圈控制磁轴承转轴进行悬浮,一个磁轴承位移信号对应两个磁轴承电流信号;混合式结构是组合式磁力轴承系统,使用一个电磁线圈和一个永久磁体控制磁轴承转轴进行悬浮,一个磁轴承位移信号对应一个磁轴承电流信号。本发明n个自由度磁悬浮轴承控制,其中n的取值范围为1~6的整数。
36.如图2所示,本发明对n个自由度磁悬浮轴承控制方法,采用混合式结构,包括如下步骤:
37.s1、获得在n个自由度方向的磁轴承位移{fd1、fd2、fd3…
fdn}和磁轴承电流{fi1、fi2…
fin},其中n为1~6的整数;
38.s2、第一自由度磁轴承位置环运算:
39.将第一自由度磁轴承的位移给定值与第一自由度磁轴承位移fd1做差后输入至位置环pid控制器,得到第一自由度磁轴承电流给定值;
40.s3、第一自由度磁轴承电流环运算和脉宽调整:
41.将第一自由度磁轴承电流fi1与第一自由度磁轴承电流给定值做差后输入至电流环pi控制器,并经过脉冲宽度调制后得到第一自由度磁轴承pwm调制信号p1;
42.s4、相邻自由度磁轴承位置环运算和电流环运算:
43.参照图3,该步骤是实现流水线算法的关键,当电流环pi控制器对第一自由度磁轴承进行运算时,则同时将第二自由度磁轴承的位移给定值与第二自由度磁轴承位移fd2做差后输入至位置环pid控制器,得到第二自由度磁轴承电流给定值;当脉冲宽度调制生成第一自由度磁轴承pwm调制信号时,则同时将第二自由度磁轴承电流fi2与第二自由度磁轴承电流给定值做差后输入至电流环pi控制器,同时将第三自由度磁轴承的位移给定值与第三自由度磁轴承位移fd3做差后输入至位置环pid控制器,得到第三自由度磁轴承电流给定
值;
44.s5、根据s4的方式,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承pwm调制信号组合{p1、p2…
pn};
45.s6、根据磁轴承pwm调制信号组合{p1、p2…
pn}同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制。
46.本发明还可以针对主动式磁轴承结构进行控制,其中使用两个电磁线圈控制磁轴承转轴进行悬浮,其特征在于,包括如下步骤:
47.s1、获得在n个自由度方向的磁轴承位移{fd1、fd2、fd3…
fdn}和磁轴承电流{fi
11
、fi
12
、fi
21
、fi
22
…
fi
n1
、fi
n2
},其中n为1~6的整数;
48.s2、第一自由度磁轴承位置环运算:
49.将第一自由度磁轴承的位移给定值与第一自由度磁轴承位移fd1做差后输入至位置环pid控制器,得到第一自由度磁轴承电流给定值;
50.s3、第一自由度磁轴承电流环运算和脉宽调整:
51.将第一自由度磁轴承电流fi
11
和fi
12
与第一自由度磁轴承电流给定值做差后分别输入至两个电流环pi控制器,并经过脉冲宽度调制后得到第一自由度磁轴承pwm调制信号p
11
、p
12
;
52.s4、相邻自由度磁轴承位置环运算和电流环运算:
53.当电流环pi控制器对第一自由度磁轴承进行运算时,则同时将第二自由度磁轴承的位移给定值与第二自由度磁轴承位移fd2做差后输入至位置环pid控制器,得到第二自由度磁轴承电流给定值;当脉冲宽度调制生成第一自由度磁轴承pwm调制信号时,则同时将第二自由度磁轴承电流fi
21
、fi
22
与第二自由度磁轴承电流给定值做差后输入至电流环pi控制器,同时将第三自由度磁轴承的位移给定值与第三自由度磁轴承位移fd3做差后输入至位置环pid控制器,得到第三自由度磁轴承电流给定值;
54.s5、根据s4的方式,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承pwm调制信号组合{p
11
、p
12
、p
21
、p
22
…
p
n1
、p
n2
};
55.s6、根据磁轴承pwm调制信号组合{p
11
、p
12
、p
21
、p
22
…
p
n1
、p
n2
}同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制
56.如图5所示,本发明还提供一种基于fpga的磁悬浮轴承控制系统,包括设置在fpga上的磁轴承位移采样模块1、磁轴承电流采样模块2和磁轴承运算模块3。
57.若采用混合式结构,所述磁轴承位移采样模块1采用n个并行设置,用于获取n个自由度方向的磁轴承位移;所述磁轴承电流采样模块2也采用n个并行设置,其用于获取n个自由度方向的磁轴承电流。若采用主动式结构,其中磁轴承电流采样模块2采用2n个并行设置。
58.所示磁轴承运算模块3数量为1个,该磁轴承运算模块用于接收磁轴承位移和磁轴承电流信号,并依次进行n个自由度方向的磁轴承位移运算和磁轴承电流运算,通过脉宽调整得到磁轴承pwm调制信号组合。
59.所述基于fpga的磁悬浮轴承控制还包括并行设置的n个pwm信号输出模块4和n个功率放大器5,所述pwm信号输出模块用于将pwm调制信号组合输出至功率放大器控制磁悬浮轴承的电流大小。所述功率放大器采用开关功率放大器。若采用主动式结构,功率放大器
5根据选型不同,可以是n个也可以是2n个。
60.进一步地,所述磁轴承运算模块3包括位置环pid控制器31、电流环pi控制器32以及三电平脉冲宽度调制算法模块33。所述位置环pid控制器31能够将磁轴承的位移给定值与磁轴承位移做差后进行位移环运算得到磁轴承电流给定值;所述电流环pi控制器32能够将磁轴承电流与磁轴承电流给定值做差后进行电流环运算;所述三电平脉冲宽度调制算法模块33将电流环pi控制器的运算结果进行脉冲宽度调制后得到轴承pwm调制信号。
61.图4给出了五自由度磁悬浮轴承控制方法的三级流水线结构时序调度原理图(混合式结构)。设fx、fy、rx、ry、az分别表示前向x方向、前向y方向,后向x方向、后向y方向以及轴承磁轴承,以控制频率为20khz为例进行说明。在fpga中创建一个50us的定时计数模块,在计数开启时启动磁轴承控制启动信号,进行并行的磁轴承位移采样及电流采样,采样结束后触发磁轴承运算模块,将fx磁轴承的位移给定与位移反馈信号输入到位置环pid控制器并进行运算,运算结束后将位置环pid控制器结果以控制器计算结束后将计算结果输入到三电平脉冲宽度调制算法模块,启动此模块对fx磁轴承的运算,运算结束后将结果缓存在fx对应的pwm比较值寄存器中;如果电流环pi控制器启动对fx磁轴承的运算,则同时启动位置环pid控制器对fy磁轴承的运算;依次类推,当电流环pi控制器启动对fy磁轴承的运算,则启动位置环pid控制器对rx磁轴承的运算,直至完成az磁轴承的三电平脉冲宽度调制计算,此时触发pwm信号输出模块加载启动信号,将所有磁轴承的pwm比较值寄存器的值更新到pwm信号输出模块,同时控制各磁轴承电流的大小,实现对磁轴承的悬浮控制,至此单次磁轴承悬浮控制运算结束。在fpga中的50us定时计数器再次开始计数时,重新进行上述步骤。如图4所示,所述五自由度的运算顺序依次为:
62.1)前向x磁轴承位置环运算;
63.2)前向x磁轴承电流环运算、前向y磁轴承位置环运算;
64.3)前向x磁轴承脉宽调整、前向y磁轴承电流环运算、后向x磁轴承位置环运算;
65.4)前向y磁轴承脉宽调整、后向x磁轴承电流环运算、后向y磁轴承位置环运算;
66.5)后向x磁轴承脉宽调整、后向y磁轴承电流环运算、轴向z磁轴承位置环运算;
67.6)后向y磁轴承脉宽调整、轴向z磁轴承电流环运算;
68.7)轴向z磁轴承脉宽调整。
69.以上所述实施方式仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明的权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。