技术特征:
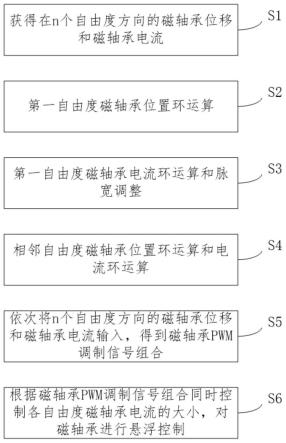
1.基于fpga的多自由度磁悬浮轴承控制方法,其中使用一个电磁线圈和一个永久磁体控制磁轴承转轴进行悬浮,其特征在于,包括如下步骤:s1、获得在n个自由度方向的磁轴承位移{fd1、fd2、fd3…
fd
n
}和磁轴承电流{fi1、fi2…
fi
n
},其中n为1~6的整数;s2、第一自由度磁轴承位置环运算:将第一自由度磁轴承的位移给定值与第一自由度磁轴承位移fd1做差后输入至位置环pid控制器,得到第一自由度磁轴承电流给定值;s3、第一自由度磁轴承电流环运算和脉宽调整:将第一自由度磁轴承电流fi1与第一自由度磁轴承电流给定值做差后输入至电流环pi控制器,并经过脉冲宽度调制后得到第一自由度磁轴承pwm调制信号p1;s4、相邻自由度磁轴承位置环运算和电流环运算:当电流环pi控制器对第一自由度磁轴承进行运算时,则同时将第二自由度磁轴承的位移给定值与第二自由度磁轴承位移fd2做差后输入至位置环pid控制器,得到第二自由度磁轴承电流给定值;当脉冲宽度调制生成第一自由度磁轴承pwm调制信号时,则同时将第二自由度磁轴承电流fi2与第二自由度磁轴承电流给定值做差后输入至电流环pi控制器,同时将第三自由度磁轴承的位移给定值与第三自由度磁轴承位移fd3做差后输入至位置环pid控制器,得到第三自由度磁轴承电流给定值;s5、根据s4的方式,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承pwm调制信号组合{p1、p2…
p
n
};s6、根据磁轴承pwm调制信号组合{p1、p2…
p
n
}同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制。2.基于fpga的多自由度磁悬浮轴承控制方法,其中使用两个电磁线圈控制磁轴承转轴进行悬浮,其特征在于,包括如下步骤:s1、获得在n个自由度方向的磁轴承位移{fd1、fd2、fd3…
fd
n
}和磁轴承电流{fi
11
、fi
12
、fi
21
、fi
22
…
fi
n1
、fi
n2
},其中n为1~6的整数;s2、第一自由度磁轴承位置环运算:将第一自由度磁轴承的位移给定值与第一自由度磁轴承位移fd1做差后输入至位置环pid控制器,得到第一自由度磁轴承电流给定值;s3、第一自由度磁轴承电流环运算和脉宽调整:将第一自由度磁轴承电流fi
11
和fi
12
与第一自由度磁轴承电流给定值做差后分别输入至两个电流环pi控制器,并经过脉冲宽度调制后得到第一自由度磁轴承pwm调制信号p
11
、p
12
;s4、相邻自由度磁轴承位置环运算和电流环运算:当电流环pi控制器对第一自由度磁轴承进行运算时,则同时将第二自由度磁轴承的位移给定值与第二自由度磁轴承位移fd2做差后输入至位置环pid控制器,得到第二自由度磁轴承电流给定值;当脉冲宽度调制生成第一自由度磁轴承pwm调制信号时,则同时将第二自由度磁轴承电流fi
21
、fi
22
与第二自由度磁轴承电流给定值做差后输入至电流环pi控制器,同时将第三自由度磁轴承的位移给定值与第三自由度磁轴承位移fd3做差后输入至位置环pid控制器,得到第三自由度磁轴承电流给定值;
s5、根据s4的方式,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承pwm调制信号组合{p
11
、p
12
、p
21
、p
22
…
p
n1
、p
n2
};s6、根据磁轴承pwm调制信号组合{p
11
、p
12
、p
21
、p
22
…
p
n1
、p
n2
}同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制。3.根据权利要求1所述的多自由度磁悬浮轴承控制方法,其特征在于,所述多自由度为五自由度,分别为前向x、前向y、后向x、后向y和轴向z。4.根据权利要求3所述的多自由度磁悬浮轴承控制方法,其特征在于,所述五自由度的运算顺序依次为:1)前向x磁轴承位置环运算;2)前向x磁轴承电流环运算、前向y磁轴承位置环运算;3)前向x磁轴承脉宽调整、前向y磁轴承电流环运算、后向x磁轴承位置环运算;4)前向y磁轴承脉宽调整、后向x磁轴承电流环运算、后向y磁轴承位置环运算;5)后向x磁轴承脉宽调整、后向y磁轴承电流环运算、轴向z磁轴承位置环运算;6)后向y磁轴承脉宽调整、轴向z磁轴承电流环运算;7)轴向z磁轴承脉宽调整。5.采用权利要求1所述多自由度磁悬浮轴承控制方法的系统,该系统设置在fpga上,其特征在于,所述系统包括:并行设置的n个磁轴承位移采样模块和n个磁轴承电流采样模块,所述磁轴承位移采样模块用于获取n个自由度方向的磁轴承位移;所述磁轴承电流采样模块用于获取n个自由度方向的磁轴承电流;一个磁轴承运算模块,该磁轴承运算模块用于接收磁轴承位移和磁轴承电流信号,并依次进行n个自由度方向的磁轴承位移运算和磁轴承电流运算,通过脉宽调整得到磁轴承pwm调制信号组合;以及并行设置的n个pwm信号输出模块和n个功率放大器,所述pwm信号输出模块用于将pwm调制信号组合输出至功率放大器控制磁悬浮轴承的电流大小。6.采用权利要求2所述多自由度磁悬浮轴承控制方法的系统,该系统设置在fpga上,其特征在于,所述系统包括:并行设置的n个磁轴承位移采样模块和2n个磁轴承电流采样模块,所述磁轴承位移采样模块用于获取n个自由度方向的磁轴承位移;所述磁轴承电流采样模块用于获取n个自由度方向的磁轴承电流;一个磁轴承运算模块,该磁轴承运算模块用于接收磁轴承位移和磁轴承电流信号,并依次进行n个自由度方向的磁轴承位移运算和磁轴承电流运算,通过脉宽调整得到磁轴承pwm调制信号组合;以及并行设置的n个pwm信号输出模块以及n或2n个功率放大器,所述pwm信号输出模块用于将pwm调制信号组合输出至功率放大器控制磁悬浮轴承的电流大小。7.根据权利要求5所述的多自由度磁悬浮轴承控制系统,其特征在于,所述磁轴承运算模块包括一个位置环pid控制器、一个电流环pi控制器以及一个三电平脉冲宽度调制算法模块;所述位置环pid控制器能够将磁轴承的位移给定值与磁轴承位移做差后进行位移环运
算得到磁轴承电流给定值;所述电流环pi控制器能够将磁轴承电流与磁轴承电流给定值做差后进行电流环运算;所述三电平脉冲宽度调制算法模块将电流环pi控制器的运算结果进行脉冲宽度调制后得到轴承pwm调制信号。8.根据权利要求6所述的多自由度磁悬浮轴承控制系统,其特征在于,所述磁轴承运算模块包括一个位置环pid控制器、两个电流环pi控制器以及一个三电平脉冲宽度调制算法模块;所述位置环pid控制器能够将磁轴承的位移给定值与磁轴承位移做差后进行位移环运算得到磁轴承电流给定值;所述电流环pi控制器能够将磁轴承电流与磁轴承电流给定值做差后进行电流环运算;所述三电平脉冲宽度调制算法模块将电流环pi控制器的运算结果进行脉冲宽度调制后得到轴承pwm调制信号。9.根据权利要求5或6所述的多自由度磁悬浮轴承控制系统,其特征在于,所述功率放大器采用开关功率放大器。
技术总结
本发明提供一种基于FPGA的多自由度磁悬浮轴承控制方法及系统,包括获得在n个自由度方向的磁轴承位移和磁轴承电流,第一自由度磁轴承位置环运算,第一自由度磁轴承电流环运算和脉宽调整,相邻自由度磁轴承位置环运算和电流环运算,依次将n个自由度方向的磁轴承位移和磁轴承电流输入,得到磁轴承PWM调制信号组合,根据磁轴承PWM调制信号组合同时控制各自由度磁轴承电流的大小,对磁轴承进行悬浮控制。本发明对各功能模块进行调度优化,使得多自由度磁轴承控制使用一路磁轴承控制运算模块,很好的控制了硬件成本,同时PWM信号同时输出较好的保证了多自由度磁轴承控制的同步性,对功能模块进行分时复用,使整个系统在节约逻辑资源的同时保证运算速度。辑资源的同时保证运算速度。辑资源的同时保证运算速度。
技术研发人员:孙建东 陈雨琴 王兆杰
受保护的技术使用者:瑞纳智能设备股份有限公司
技术研发日:2022.08.29
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。