1.本发明涉及起重运输自动无人摘挂钩领域,包括视觉识别装置和吨袋的起升吊具装置,以及水平式吊耳吨袋。
背景技术:
2.在起重运输领域,柔软性运输包装容器作为对散粒物料运输的容器,因为其承载重量大、结构简单、成本低,可塑性强等优点,越来越广泛的被应用到对散粒物料进行包装转运的领域。柔软性运输包装容器中吨袋的应用最为广泛,吨袋的结构为拥有吊耳的类立方体结构,提拉吊耳可以对吨袋进行起重及转运,吨袋在运输散粒物料过程中,由于吨袋的柔软性,需要对吨袋进行人为的摘挂钩动作,而且对于某些大型的转运设备,驾驶员的视野也会受到吊具的影响,不能准确的观察到吨袋的位姿,同样需要人为进行导航与检测,极大的耗费人力资源,难以实现无人车间,自动化作业目标。另外在运输例如铝粉等金属粉末的过程中,工作人员难免会接触到有害金属粉末,存在安全防护等级低等问题。因此不满足现有的需求,基于这种情况,本发明提出一种基于视觉识别的水平式吊耳吨袋自动摘挂钩系统。
技术实现要素:
3.本发明的目的在于提供一种基于视觉识别的水平式吊耳吨袋自动摘挂钩系统,以解决对吨袋进行摘挂钩需要人为识别、人为主动摘挂钩的问题,人为摘挂钩不仅耗费人力资源,且存在安全等级低的问题。为实现上述目的,本发明提供了如下技术方案:一种基于视觉识别的水平式吊耳吨袋自动摘挂钩系统,包括视觉识别装置和吨袋的起升吊具装置,以及水平式吊耳吨袋三个部分,所述视觉识别装置安装在对吨袋执行吊运动的起重机、叉车等转运设备上,所述视觉识别装置使用单目相机、双目相机、结构光传感器、激光雷达等三维感知传感器,所述起升吊具装置为针对水平式吊耳吨袋的特性制作的吊具,吊具整体包括一根伸缩轴,两个伸缩杆、两个吊钩结构和两个橡胶轮,所述两个伸缩杆分别安装在伸缩轴两端,两个吊钩结构分别与两个伸缩杆成一个锐角连接,两个橡胶轮分别安装在两个吊钩结构的头部,所述水平式吊耳吨袋,吊耳与滑块连接,滑块安装在弹簧盒内,滑块可在弹簧盒内滑动,并且通过安装在滑块上的弹簧进行自由状态下的回弹。
4.优选的,所述单目相机、结构光传感器、双目相机、激光雷达等三维传感器配合使用,传感器进行异源信息融合,得到精度合适、鲁棒性高的三维地图,依据三维地图进行摘挂钩动作的导航与检测。传感器均安装于对吨袋执行吊运动的起重机、叉车等转运设备上。
5.优选的,所述起升吊具装置的两根伸缩杆通过伸缩轴连接,具有伸缩功能,目的在于能使起升吊具装置在挂钩前向下运动,不对吨袋产生干涉,并且可以适应不同宽度的吨袋。
6.优选的,所述吊钩结构与伸缩杆的竖直段成一个锐角连接,使吊耳在成功挂钩后,能在吨袋重力作用下,吊耳不发生脱钩现象。
7.优选的,所述起升吊具装置的两个橡胶轮,可以在吊具工作时随时转动与停止,橡胶轮可以与吨袋吊耳产生摩擦,极大的增加了对吨袋吊耳进行摘挂钩的成功率。
8.优选的,所述吨袋吊耳与滑块连接,沿着滑块方向水平放置在吨袋的侧面,滑块安装在弹簧盒内,滑块可在弹簧盒内滑动,拉动吊耳,滑块会被一同拉出一段,放松拉力,吨袋吊耳通过安装在滑块上的弹簧进行自由状态下的回弹。
9.优选的,所述吨袋吊耳涂有特殊颜色,方便视觉识别装置对吊耳的位姿进行识别。
10.与现有技术相比,本发明的有益效果是:1.本发明在吊具对吨袋进行自动摘挂钩时,加入了视觉识别装置,通过三维感知传感器对吊具、吨袋、吨袋吊耳的位姿进行识别,随后根据先验信息对吊具和背景进行剔除,然后根据吨袋吊耳的外形以及颜色信息对吨袋包身和吨袋吊耳进行分割,保留吨袋吊耳部分的视觉信息,从而判断吨袋吊耳的位置和姿态。2.本发明的视觉识别装置获取吊耳三维模型,起重机、叉车等转运设备会根据吊耳的不同位姿自行进行挂载和摘钩动作。 3.本发明的起升吊具装置中的吊钩结构,安装有橡胶轮,在吊具工作过程中,橡胶轮可以转动,橡胶轮和吨袋吊耳的摩擦,极大的增加了吊具对吊耳进行自动摘挂钩的成功率。4.本发明的水平式吊耳吨袋是针对起升吊具装置设计的,吨袋侧面安装有弹簧盒,弹簧盒中安装有滑块,滑块上安装有弹簧,吨袋吊耳与滑块连接,受到拉力时滑块弹出,拉力消失后,滑块会回弹到弹簧盒内,这种设计使吊耳的位姿始终保持水平,只能被拉出和回弹,不会下垂或上折,方便摘挂钩动作的完成。
附图说明
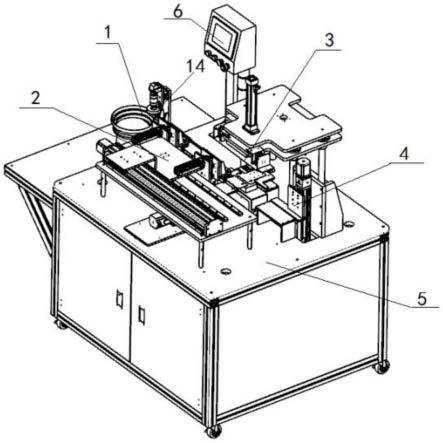
11.图1为起升吊具装置的主视图;
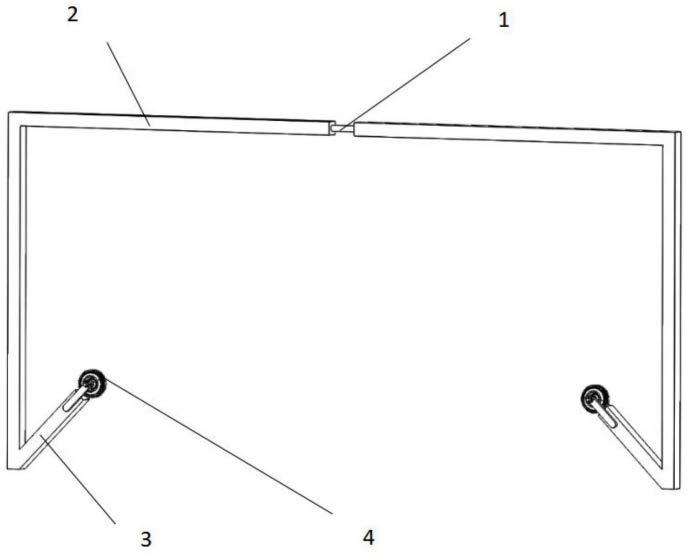
12.图2为水平式吊耳吨袋的结构示意图;
13.附图标记说明:1、伸缩轴;2、伸缩杆;3、吊钩结构;4、橡胶轮;5、吨袋;501、吨袋吊耳;502、弹簧盒;503、滑块;504、弹簧。
具体实施方式
14.附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些动力装置及其说明可能省略是可以理解的;在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以是通过中间媒介间接连接,可以说两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明的具体含义。术语“上”、“下”、“左”、“右”、“前”、“后”、“底部”、“末端”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。本发明提供的一种实施例:一种基于视觉识别的水平式吊耳吨袋自动摘挂钩系统,包括视觉识
别装置、起升吊具装置、水平式吊耳吨袋,其中视觉识别装置安装在对吨袋执行吊运动的起重机、叉车等转运设备上,起升吊具装置安装在起重机吊具位置上,吨袋安放于待转运位置,首先起重机上的视觉识别装置开始工作,视觉识别装置获取工作环境中吊具、吨袋、吨袋吊耳的三维模型,得到精度合适、鲁棒性高的三维地图,然后依据三维地图进行摘挂钩动作的导航与检测。本发明使用三维传感器作为系统主要检测设备。
16.视觉识别技术中由三维传感器获取关于被吊运物体及周边环境的栅格三维模型。接下来由视觉识别装置根据先验信息对栅格三维模型进行识别,剔除吊具和环境的背景信息,保留吨袋的视觉信息,然后根据吨袋的外形和吊耳的颜色对吊耳和吨袋袋身进行分割,保留吊耳的位姿信息,最后根据吊耳的不同种位姿,编码动作信息,从而驱动起重机的动力装置,实现起升吊具装置的不同动作,完成对水平式吊耳吨袋的自动摘挂钩动作。
17.由于对吨袋进行了改装,安装有弹簧盒,这就致使吨袋吊耳的位姿总是水平放在吨袋的侧面,既不会向上折叠,也不会下垂,且吊耳自由状态不是紧贴着吨袋侧面,而是与吨袋留有一段距离,可容纳起升吊具装置的橡胶轮进入,当吊耳受到拉力,滑块会沿着弹簧盒向外伸出一段,当拉力消失,滑块上的弹簧会使滑块回弹,拉动吊耳回到自由状态。
18.请参阅图1,起升吊具装置包括伸缩轴1、伸缩杆2、吊钩结构3、橡胶轮4。视觉识别装置,检测吊耳位姿,动力装置驱动起升吊具装置运动到吨袋正上方,两个吊钩结构3分别运动到吨袋有吊耳的两个侧面,伸缩杆2沿着伸缩轴1向两侧移动,保证吊具顺利向下运动,不对吨袋5进行干涉,起升吊具装置整体向下运动,运动到当吊钩结构3头部的橡胶轮4低于吨袋吊耳501时停止。接下来,伸缩杆2沿着伸缩轴1向中间收缩,请参阅图2,吨袋5包括吨袋吊耳501、弹簧盒502、滑块503、弹簧504。当视觉识别装置检测到两个橡胶轮4运动到吊耳下方,伸缩杆2停止收缩,视觉识别装置会传输信息给动力系统,驱动橡胶轮 4转动,转动方向为左侧橡胶轮4逆时针,右侧橡胶轮4顺时针,同时起升吊具装置整体向上运动,橡胶轮可与吊耳产生摩擦,极大的增加挂钩的成功率。当视觉识别装置检测到两个橡胶轮4顺利进入到吊耳中,两个吊钩结构3均成功实现挂钩动作,橡胶轮4停止转动,在吨袋的重力作用下,吨袋吊耳501会沿着吊钩结构3的斜面,向伸缩杆2与吊钩结构3的连接处运动,不会发生脱钩现象,从而完成对水平式吊耳吨袋的自动无人挂载动作。
19.当起重机运输吨袋5运动到吨袋5堆垛区域,吨袋5与地面进行接触后,起升吊具装置,继续向下运动,同时橡胶轮4转动,转动方向为左侧橡胶轮4顺时针,右侧橡胶轮4逆时针,由于橡胶轮4与吨袋吊耳501的摩擦,极大的增加了吊耳脱离吊具的成功率。当视觉识别装置检测到两吊耳完全脱离吊具,起升吊具装置停止下降,伸缩杆2沿着伸缩轴1向两侧移动,吊钩结构3远离吨袋吊耳 501,保证起升吊具装置向上运动,橡胶轮3不会对吊耳产生干涉时,伸缩杆2 停止伸缩,橡胶轮4停止转动,然后起升吊具装置向上运动,自此完成对水平式吊耳吨袋的自动无人摘钩动作。
20.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。