1.本发明属于动力能源技术领域,具体地,涉及一种水下高速航行体固定时间收敛二阶滑模控制方法及控制系统。
背景技术:
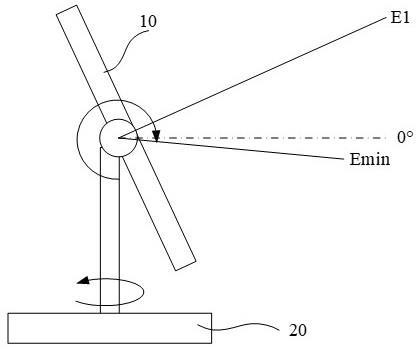
2.超空泡指当航行体在水下高速航行时,由于速度较快,使得周围液体压力减小,气化后形成一层超空泡,弹体被空泡包裹,与周围液体隔开,超空泡技术可以有效减小航行体航行过程中的阻力,从而大幅提高航行速度,是目前研究的热点。与传统全部沾湿的航行体相比,水下高速航行体的受力模式完全不同,仅受前端空化器、尾舵、重力以及尾部滑行力的作用,与空泡相互耦合导致该系统具有强非线性及强时变特性,给控制器设计带来了巨大的挑战,而外界干扰及系统不确定性的存在也给控制器设计带来了新的难题。
技术实现要素:
3.本发明针对上述问题,提出了一种水下高速航行体固定时间收敛二阶滑模控制方法及控制系统;首先建立水下高速航行体动力学模型,后基于二阶滑模控制算法设计出固定时间收敛的控制器,并进行lyapunov稳定性证明,最后进行数学仿真验证。
4.本发明通过以下技术方案实现:
5.一种水下高速航行体固定时间收敛二阶滑模控制方法:
6.所述方法具体包括以下步骤:
7.步骤1:建立水下高速航行体动力学模型;
8.步骤2:基于二阶滑模控制算法,设计出固定时间收敛的水下高速航行体二阶滑模控制器;
9.步骤3:通过lyapunov函数,对步骤2得到的二阶滑模控制器进行稳定性证明;
10.步骤4:基于步骤1至3,进行数学仿真分析。
11.进一步地,在步骤1中,
12.步骤1.1:超空泡航行体在水下高速航行过程中,弹体大部分被空泡包裹,仅受空化器控制力f
cav
、重力fg、尾舵受力f
fin
以及由于弹体与空泡壁接触产生的滑行力f
plane
,这些力和对应力矩的作用,数学模型如下所示:
[0013][0014]
式中,z,θ,w,q分别表示航行体的深度、俯仰角、垂向速度以及俯仰角速度,v表示航行体的轴向速度,m为航行体的质量,jy为航行体的转动惯量,lc为航行体头部到质心距离,lf为航行体尾部到质心距离,
[0015]
步骤1.2:将步骤1.1中的数学模型改写为状态方程形式:
[0016][0017]
式中,δc、δf表示空化器舵偏角及尾舵舵偏角,f
p
(t,τ)表示航行体所受尾拍力的大小;
[0018]
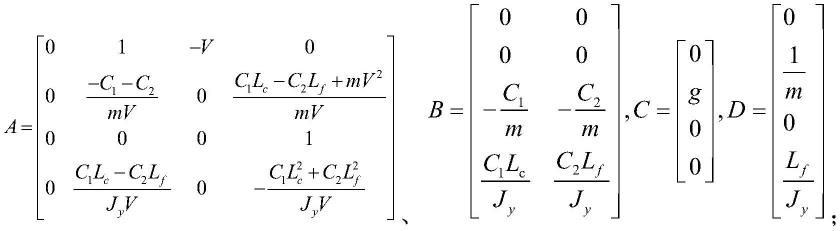
步骤1.3:模型的矩阵的具体形式为:
[0019][0020]
其中,g为重力加速度,rn为空化器半径,ρ为水的密度,σ为空化数,n为相似系数,i(t,τ)为尾舵沾湿率。
[0021]
进一步地,在步骤2中,
[0022]
步骤2.1:定义x1=[z θ]
t
,x2=[w q]
t
以及控制输入u=[δ
c δf]
t
,则模型可以改写为如下仿射形式:
[0023][0024][0025]
式中各系统矩阵为c1=[g 0]
t
,
[0026]
设计滑模面如下:
[0027][0028]
其中:k1、k2为常数,v为航行体航行速度;
[0029]
步骤2.2:为了削弱抖振,设计二阶滑模趋近律:
[0030][0031]
式中,s=[s
1 s2]
t
为滑模面;z=[z
1 z2]
t
为系统的增广状态;m为正常数,反映滑模趋近律阶数,且有m≥2;λ1≥0、λ2≥0为控制增益;
[0032]
可以得到以下控制律:
[0033][0034]
进一步地,在步骤3中,
[0035]
步骤3.1:进行稳定性证明,令:
[0036][0037]
则对i=1,2有:
[0038][0039]
整理可得:
[0040][0041]
式中:
[0042]
取lyapunov函数为:
[0043][0044]
式中:为正定矩阵;
[0045]
对lyapunov函数求导有:
[0046][0047]
式中,当满足λ1>0,时,q为正定矩阵;
[0048]
则有:
[0049][0050]
式中:λ
qmax
为q的最大特征值,λ
qmin
为q的最小特征值;则有:
[0051][0052]
步骤3.2:令则可以转化为:
[0053][0054]
求解上式,得到收敛时间边界:
[0055]
当则有:
[0056][0057]
因此,状态误差可以在有限时间内收敛到零,最大收敛时间为
[0058]
一种水下高速航行体固定时间收敛二阶滑模控制系统:
[0059]
所述系统包括模型建立模块、滑模控制器设计模块、稳定性证明模块和仿真分析模块:
[0060]
模型建立模块,用于建立水下高速航行体动力学模型;
[0061]
滑模控制器设计模块,用于基于二阶滑模控制算法,设计出固定时间收敛的水下高速航行体二阶滑模控制器;
[0062]
稳定性证明模块,用于通过lyapunov函数,对步骤2得到的二阶滑模控制器进行稳定性证明;
[0063]
仿真分析模块,用于进行数学仿真分析。
[0064]
进一步地,
[0065]
在所述模型建立模块中,还包括数学模型分析模块、状态方程建立模块和矩阵建立模块;
[0066]
数学模型分析模块:在超空泡航行体在水下高速航行过程中,弹体大部分被空泡包裹,仅受空化器控制力f
cav
、重力fg、尾舵受力f
fin
以及由于弹体与空泡壁接触产生的滑行力f
plane
,这些力和对应力矩的作用,数学模型如下所示:
[0067][0068]
式中,z,θ,w,q分别表示航行体的深度、俯仰角、垂向速度以及俯仰角速度,v表示航行体的轴向速度,m为航行体的质量,jy为航行体的转动惯量,lc为航行体头部到质心距离,lf为航行体尾部到质心距离,
[0069]
状态方程建立模块:将数学模型改写为状态方程形式:
[0070][0071]
式中,δc、δf表示空化器舵偏角及尾舵舵偏角,f
p
(t,τ)表示航行体所受尾拍力的大小;
[0072]
矩阵建立模块:模型的矩阵的具体形式为:
[0073][0074]
其中,g为重力加速度,rn为空化器半径,ρ为水的密度,σ为空化数,n为相似系数,i(t,τ)为尾舵沾湿率。
[0075]
进一步地,
[0076]
在所述滑模控制器设计模块中,还包括滑模面设计模块和滑模趋近律设计模块;
[0077]
滑模面设计模块:定义x1=[z θ]
t
,x2=[w q]
t
以及控制输入u=[δ
c δf]
t
,则模型可以改写为如下仿射形式:
[0078][0079][0080]
式中各系统矩阵为c1=[g 0]
t
,
[0081]
设计滑模面如下:
[0082][0083]
其中:k1、k2为常数,v为航行体航行速度;
[0084]
滑模趋近律设计模块:用于削弱抖振,设计二阶滑模趋近律:
[0085][0086]
式中,s=[s
1 s2]
t
为滑模面;z=[z
1 z2]
t
为系统的增广状态;m为正常数,反映滑模趋近律阶数,且有m≥2;λ1≥0、λ2≥0为控制增益;
[0087]
可以得到以下控制律:
[0088][0089]
进一步地,
[0090]
在所述稳定性证明模块中,还包括lyapunov模块和时间边界计算模块;
[0091]
lyapunov模块:进行稳定性证明,令:
[0092][0093]
则对i=1,2有:
[0094][0095]
整理可得:
[0096][0097]
式中:
[0098]
取lyapunov函数为:
[0099][0100]
式中:为正定矩阵;
[0101]
对lyapunov函数求导有:
[0102]
[0103]
式中,当满足λ1>0,时,q为正定矩阵;
[0104]
则有:
[0105][0106]
式中:λ
qmax
为q的最大特征值,λ
qmin
为q的最小特征值;则有:
[0107][0108]
时间边界计算模块:令则可以转化为:
[0109][0110]
求解上式,得到收敛时间边界:
[0111]
当则有:
[0112][0113]
因此,状态误差可以在有限时间内收敛到零,最大收敛时间为
[0114]
一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述方法的步骤。
[0115]
一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现上述任一项所述方法的步骤。
[0116]
本发明有益效果
[0117]
本发明可有效进行深度控制,其控制精度很高,收敛时间快,且有效削弱了滑模控制器的抖振效应,使得深度能够平滑且快速的达到指定深度。
附图说明
[0118]
图1为水下高速航行体受力分析图;
[0119]
图2为航行体深度曲线图;
[0120]
图3为航行体垂向速度曲线图;
[0121]
图4为航行体俯仰角曲线图;
[0122]
图5为航行体俯仰角速率曲线图;
[0123]
图6为航行体滑行力曲线图;
[0124]
图7为空化器舵偏角曲线图;
[0125]
图8为尾舵舵偏角曲线图。
具体实施方式
[0126]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0127]
结合图1至图8。
[0128]
一种水下高速航行体固定时间收敛二阶滑模控制方法:
[0129]
所述方法具体包括以下步骤:
[0130]
步骤1:建立水下高速航行体动力学模型;
[0131]
步骤2:基于二阶滑模控制算法,设计出固定时间收敛的水下高速航行体二阶滑模控制器;
[0132]
步骤3:通过lyapunov函数,对步骤2得到的二阶滑模控制器进行稳定性证明;
[0133]
步骤4:基于步骤1至3,进行数学仿真分析。
[0134]
在步骤1中,如图1所示,
[0135]
步骤1.1:超空泡航行体在水下高速航行过程中,弹体大部分被空泡包裹,仅受空化器控制力f
cav
、重力fg、尾舵受力f
fin
以及由于弹体与空泡壁接触产生的滑行力f
plane
,这些力和对应力矩的作用,数学模型如下所示:
[0136][0137]
式中,z,θ,w,q分别表示航行体的深度、俯仰角、垂向速度以及俯仰角速度,v表示航行体的轴向速度,m为航行体的质量,jy为航行体的转动惯量,lc为航行体头部到质心距离,lf为航行体尾部到质心距离,
[0138]
步骤1.2:将步骤1.1中的数学模型改写为状态方程形式:
[0139][0140]
式中,δc、δf表示空化器舵偏角及尾舵舵偏角,f
p
(t,τ)表示航行体所受尾拍力的大小;
[0141]
步骤1.3:模型的矩阵的具体形式为:
[0142][0143]
其中,g为重力加速度,rn为空化器半径,ρ为水的密度,σ为空化数,n为相似系数,i(t,τ)为尾舵沾湿率。
[0144]
在步骤2中,
[0145]
步骤2.1:定义x1=[z θ]
t
,x2=[w q]
t
以及控制输入u=[δ
c δf]
t
,则模型可以改写为如下仿射形式:
[0146][0147][0148]
式中各系统矩阵为c1=[g 0]
t
,
[0149]
设计滑模面如下:
[0150][0151]
其中:k1、k2为常数,v为航行体航行速度;
[0152]
步骤2.2:为了削弱抖振,设计二阶滑模趋近律:
[0153][0154]
式中,s=[s
1 s2]
t
为滑模面;z=[z
1 z2]
t
为系统的增广状态;m为正常数,反映滑模趋近律阶数,且有m≥2;λ1≥0、λ2≥0为控制增益;
[0155]
可以得到以下控制律:
[0156][0157]
在步骤3中,
[0158]
步骤3.1:进行稳定性证明,令:
[0159][0160]
则对i=1,2有:
[0161][0162]
整理可得:
[0163][0164]
式中:
[0165]
取lyapunov函数为:
[0166][0167]
式中:为正定矩阵;
[0168]
对lyapunov函数求导有:
[0169][0170]
式中,当满足λ1>0,时,q为正定矩阵;
[0171]
则有:
[0172][0173]
式中:λ
qmax
为q的最大特征值,λ
qmin
为q的最小特征值;则有:
[0174]
[0175]
步骤3.2:令则可以转化为:
[0176][0177]
求解上式,得到收敛时间边界:
[0178]
当则有:
[0179][0180]
因此,状态误差可以在有限时间内收敛到零,最大收敛时间为
[0181]
一种水下高速航行体固定时间收敛二阶滑模控制系统:
[0182]
所述系统包括模型建立模块、滑模控制器设计模块、稳定性证明模块和仿真分析模块:
[0183]
模型建立模块,用于建立水下高速航行体动力学模型;
[0184]
滑模控制器设计模块,用于基于二阶滑模控制算法,设计出固定时间收敛的水下高速航行体二阶滑模控制器;
[0185]
稳定性证明模块,用于通过lyapunov函数,对步骤2得到的二阶滑模控制器进行稳定性证明;
[0186]
仿真分析模块,用于进行数学仿真分析。
[0187]
在所述模型建立模块中,还包括数学模型分析模块、状态方程建立模块和矩阵建立模块;
[0188]
数学模型分析模块:在超空泡航行体在水下高速航行过程中,弹体大部分被空泡包裹,仅受空化器控制力f
cav
、重力fg、尾舵受力f
fin
以及由于弹体与空泡壁接触产生的滑行力f
plane
,这些力和对应力矩的作用,数学模型如下所示:
[0189][0190]
式中,z,θ,w,q分别表示航行体的深度、俯仰角、垂向速度以及俯仰角速度,v表示航行体的轴向速度,m为航行体的质量,jy为航行体的转动惯量,lc为航行体头部到质心距离,lf为航行体尾部到质心距离,
[0191]
状态方程建立模块:将数学模型改写为状态方程形式:
[0192][0193]
式中,δc、δf表示空化器舵偏角及尾舵舵偏角,f
p
(t,τ)表示航行体所受尾拍力的大小;
[0194]
矩阵建立模块:模型的矩阵的具体形式为:
[0195][0196]
其中,g为重力加速度,rn为空化器半径,ρ为水的密度,σ为空化数,n为相似系数,i(t,τ)为尾舵沾湿率。
[0197]
在所述滑模控制器设计模块中,还包括滑模面设计模块和滑模趋近律设计模块;
[0198]
滑模面设计模块:定义x1=[z θ]
t
,x2=[w q]
t
以及控制输入u=[δ
c δf]
t
,则模型可以改写为如下仿射形式:
[0199][0200][0201]
式中各系统矩阵为c1=[g 0]
t
,
[0202]
设计滑模面如下:
[0203][0204]
其中:k1、k2为常数,v为航行体航行速度;
[0205]
滑模趋近律设计模块:用于削弱抖振,设计二阶滑模趋近律:
[0206][0207]
式中,s=[s
1 s2]
t
为滑模面;z=[z
1 z2]
t
为系统的增广状态;m为正常数,反映滑模趋近律阶数,且有m≥2;λ1≥0、λ2≥0为控制增益;
[0208]
可以得到以下控制律:
[0209][0210]
在所述稳定性证明模块中,还包括lyapunov模块和时间边界计算模块;
[0211]
lyapunov模块:进行稳定性证明,令:
[0212][0213]
则对i=1,2有:
[0214][0215]
整理可得:
[0216][0217]
式中:
[0218]
取lyapunov函数为:
[0219][0220]
式中:为正定矩阵;
[0221]
对lyapunov函数求导有:
[0222][0223]
式中,当满足λ1>0,时,q为正定矩阵;
[0224]
则有:
[0225][0226]
式中:λ
qmax
为q的最大特征值,λ
qmin
为q的最小特征值;则有:
[0227]
[0228]
时间边界计算模块:令则可以转化为:
[0229][0230]
求解上式,得到收敛时间边界:
[0231]
当则有:
[0232][0233]
因此,状态误差可以在有限时间内收敛到零,最大收敛时间为
[0234]
在步骤4中,取控制参数m=8,k1=4,k2=0.4,并设计期望深度为zd=3,进行数学仿真分析;
[0235]
由附图的仿真结果可以看出,该二阶滑模控制可有效进行深度控制,其控制精度很高,收敛时间快,且有效削弱了滑模控制器的抖振效应,使得深度能够平滑且快速的达到指定深度。
[0236]
一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述方法的步骤。
[0237]
一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现上述任一项所述方法的步骤。
[0238]
以上对本发明所提出的一种水下高速航行体固定时间收敛二阶滑模控制方法及控制系统,进行了详细介绍,对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。