技术特征:
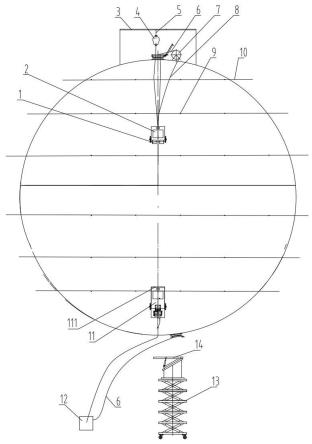
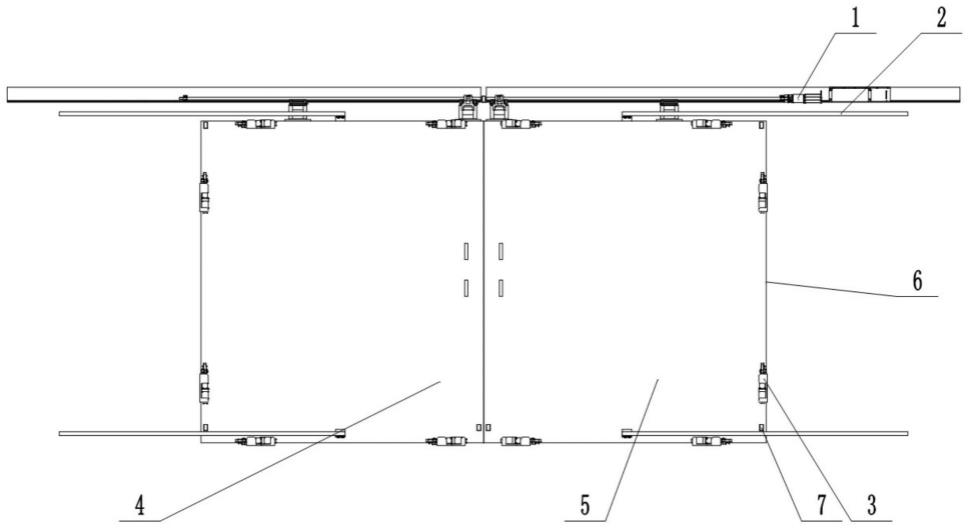
1.一种球罐外壁作业机器人的防坠系统,包括作业机器人(11)、防坠器(4)和双钩安全带(5),所述防坠器(4)一端固定于所述双钩安全带(5)上,所述双钩安全带(5)可拆卸固定于球罐顶部,其特征在于:所述防坠器(4)上远离所述双钩安全带(5)的一端设有辅助防坠机器人(2),所述防坠器(4)与所述辅助防坠机器人(2)可拆卸连接,所述辅助防坠机器人(2)上设有第一电磁铁(1),所述作业机器人(11)上设有与所述第一电磁铁(1)磁吸配合的磁吸部(111)。2.如权利要求1所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述辅助防坠机器人(2)上连接有与所述第一电磁铁(1)电性连接的第一电源线(8),所述第一电源线(8)另一端与外部控制器(12)电性连接,所述第一电源线(8)中部绕卷于自动收缩电缆盘(7)上,所述自动收缩电缆盘(7)固定设于球罐顶部,所述作业机器人(11)通过第二电源线(27)与所述外部控制器(12)电性连接。3.如权利要求2所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述作业机器人(11)上设有与所述第二电源线(27)配合的电缆抗拉装置,所述电缆抗拉装置包括抗拉钢丝(25),所述抗拉钢丝(25)一端设有抗拉钢丝环扣(26)、另一端设有挂钩(24),所述作业机器人(11)上固定设有与所述挂钩(24)可拆卸连接的抗拉挂环(23),所述抗拉钢丝环扣(26)与所述第二电源线(27)上靠近所述作业机器人(11)的一端固定连接,且所述抗拉钢丝环扣(26)与所述作业机器人(11)之间的第二电源线(27)长度大于等于所述抗拉钢丝(25)长度。4.如权利要求1所述的一种球罐外壁作业机器人的防坠系统,其特征在于:还包括辅助上下罐装置(13),所述辅助上下罐装置(13)包括竖向设置的剪式升降平台(131)和设于所述剪式升降平台(131)底部的滚轮(132),所述剪式升降平台(131)顶部设有作业间(133),所述作业间(133)内设有供人停留的内腔,且所述作业间(133)顶部设置倾斜设置的斜口,所述斜口上设有保护垫(14),所述保护垫(14)一端与所述斜口水平高度较高的一端铰接连接,所述保护垫(14)与所述作业间(133)之间设有若干撑杆(134)。5.如权利要求1所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述作业机器人(11)和所述辅助防坠机器人(2)上均设有若干磁性轮(15)即用于驱动所述磁性轮(15)旋转的动力机构,所述作业机器人(11)上还设有辅助磁吸防坠机构,所述磁吸辅助防坠机构包括分别设于所述作业机器人(11)两侧的第一杆体(16)、第二杆体(17),所述第一杆体(16)、第二杆体(17)均与所述磁性轮(15)同向设置,所述作业机器人(11)两侧分别设有与所述第一杆体(16)、第二杆体(17)配合的固定部(18),所述第一杆体(16)、第二杆体(17)分别与两侧所述固定部(18)可滑动连接,所述第一杆体(16)、第二杆体(17)滑动方向与所述磁性轮(15)同向,所述固定部(18)设有分别用于驱动所述第一杆体(16)、第二杆体(17)沿所述固定部(18)往复滑动的杆体驱动机构,所述第一杆体(16)、第二杆体(17)两端均设有用于与球罐外壁磁吸配配合的辅助磁吸件(19)。6.一种球罐外壁作业机器人的防坠方法,其特征在于,包括以下步骤:预先将双钩安全带(5)固定在球罐顶部的围栏(3)上,将防坠器(4)的一端与双钩安全带(5)连接、另一端与辅助防坠机器人(2)固定连接,将自动收缩电缆盘(7)固定在球罐顶部,辅助防坠机器人(2)的电源线经所述自动收缩电缆盘(7)后与设置在地面的外部控制器(12)电性连接,通过外部控制器(12)控制所述辅助防坠机器人(2),外部控制器(12)通过第
二电源线与作业机器人(11)电性连接;将作业机器人(11)按照打磨或检测需求放置在球罐外壁合适位置,作业前,先控制所述辅助防坠机器人(2)移动至所述作业机器人(11)附近,使所述辅助防坠机器人(2)的第一电磁铁(1)正对所述作业机器人(11)的磁吸部(111),控制所述第一电磁铁(1)通电,使所述第一电磁铁(1)与所述磁吸部(111)磁性吸附在一起,连接后的所述辅助防坠机器人(2)和所述作业机器人(11)通过所述外部控制器(12)控制保持同步运动进行打磨或检测。7.如权利要求7所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述作业机器人(11)打磨或检测球罐的纵向焊缝时,控制所述作业机器人(11)和所述辅助防坠机器人(2)同步从球罐底部由下往上进行焊缝的打磨或检测作业;在一条纵向焊缝打磨完成或检测完成后,控制所述作业机器人(11)和所述辅助防坠机器人(2)同步移动至球罐下方,控制所述第一电磁铁(1)与所述磁吸部(111)分离,将所述作业机器人(11)移动至下一条需要打磨或检测的纵向焊缝下方,分离后的辅助防坠机器人(2)移动至球罐上方并由球罐上方横向移动至下一条需要打磨或检测的纵向焊缝上方,然后沿焊缝下降至再次与所述作业机器人(11)磁吸连接,重复打磨步骤。8.如权利要求7所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述作业机器人(11)打磨或检测球罐的横向焊缝时,控制连接在一起的所述作业机器人(11)和所述辅助防坠机器人(2)同步移动至球罐上方,然后控制所述第一电磁铁(1)与所述磁吸部(111)分离,将所述防坠器(4)从所述辅助防坠机器人(2)上拆下并连接至所述作业机器人(11)上,控制所述辅助防坠机器人(2)移动至不妨碍所述作业机器人(11)作业的空位处;控制所述作业机器人(11)沿着横向焊缝向一侧打磨或检测四分之一周长度,然后控制所述作业机器人(11)退回起始位置后继续移动并对另一侧横向焊缝进行打磨或检测,打磨或检测长度为焊缝的四分之一周长度,然后控制所述作业机器人(11)再次退回起始位置;控制所述作业机器人(11)90度转弯后移动至下一横向焊缝处,然后所述作业机器人(11)再次进行90度转弯,使所述作业机器人(11)对其下一横向焊缝,再次进行打磨或检测作业。9.如权利要求7所述的一种球罐外壁作业机器人的防坠系统,其特征在于:同一球罐上所述作业机器人(11)和所述辅助防坠机器人(2)均为两台,每台所述辅助防坠机器人(2)分别与一所述作业机器人(11)配合负责纵向半个球罐或横向半个球罐的纵向焊缝或横向焊缝打磨;或同一球罐上设有两台所述作业机器人(11)和一台所述辅助防坠机器人(2),球罐沿纵向分为前半面球罐和后半面球罐,两台所述作业机器人(11)分别负责前半面球罐和后半面球罐的打磨,当任一半面球罐进行纵向焊缝作业时,所述辅助防坠机器人(2)移动至该半面球罐并与位于该半面球罐的作业机器人(11)磁吸连接进行作业,另一半面球罐的作业机器人(11)进行横向焊缝作业。10.如权利要求7所述的一种球罐外壁作业机器人的防坠系统,其特征在于:所述辅助防坠机器人(2)与所述作业机器人(11)连接后,采用主从式同步控制系统进行运动控制,所述作业机器人(11)作为主机器人,以固定速度运动,所述辅助防坠机器人(2)作为从机器人,其采用变频调速的方法,以模糊pid算法作为核心控制器,以主机器人与从机器人的偏差e及偏差变化率ec作为模糊控制器输入,通过控制变频器的输入电压,改变从机器人电机的供电电源频率,控制从机器人电机运动速度与主机器人电机运动速度保持一致。
技术总结
本发明公开了一种球罐外壁作业机器人的防坠系统及方法,包括作业机器人、防坠器和双钩安全带,所述防坠器一端固定于所述双钩安全带上,所述双钩安全带可拆卸固定于球罐顶部,所述防坠器上远离所述双钩安全带的一端设有辅助防坠机器人,所述防坠器与所述辅助防坠机器人可拆卸连接,所述辅助防坠机器人上设有第一电磁铁。本发明通过设置辅助防坠机器人与作业机器人配合,提高作业机器人作业安全性,避免作业机器人作业过程中坠落,辅助防坠机器人与作业机器人之间通过第一电磁铁与磁吸部磁吸配合,连接分离更方便。便于辅助防坠机器人与作业机器人在球罐外壁的喷淋管以及固定喷淋管的支柱之间穿插,作业机器人换道更方便。作业机器人换道更方便。作业机器人换道更方便。
技术研发人员:杜兴吉 孔帅 唐萍 陈永贵 管陈锋 郭伟灿
受保护的技术使用者:浙江省特种设备科学研究院
技术研发日:2022.09.02
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。