1.本发明涉及轨道运动机械设计领域。
背景技术:
2.轨道运动系统广泛应用于工业和民用领域,如输送、装配、摄影等。其中输送和装配轨道多采用链式传动、齿轮驱动、皮带传动、十字臂式驱动或者凹槽轮驱动等,其功能和精度受到传动方式的限制。而摄影轨道作为摄影器材中的辅助工具,可以使摄像机在一定范围内平行移动,但现有的轨道形式无法满足日益复杂的摄影需求。
3.在运动过程中,除了需要让设备水平方向运动,在很多场景也需要其竖直运动。目前常见的立体轨道多设有切换装置,这样不仅加装了额外的机械结构,同时也降低了系统的精度和稳定性。同时现有的轨道无法实现水平方向和竖直方向的平滑、稳定过渡,无法实现运动的多样化。所以提出一种可以同时适应水平和竖直方向并能做到平滑过渡的轨道系统非常必要。
技术实现要素:
4.为解决上述内容,本发明的目的在于提供一种滑块沿轨道的水平运动、竖直运动,以及滑块在轨道弯曲段的平稳过渡;该系统可以满足滑块预定轨迹的高精度实现。
5.为了达到上述目的,本发明采用的技术方案如下:
6.一种基于磁驱动自适应柔性滑块的立体平滑过渡轨道运动系统,包括自适应滑块、轨道、安装在自适应滑块上的滚轮;所述轨道中包含至少一端弧形弯曲段,且轨道内设有沿轨道延伸方向排列的若干线圈绕组;所述滚轮承载于轨道上并沿着轨道滚动;所述自适应滑块包括并排设置的若干主板及连接相邻两个主板之间的连接体;所述主板内部设有永磁体;线圈绕组通电产生磁场时,通过磁感效应驱动永磁体带动自适应滑块沿轨道滑动;所述连接体为形状记忆合金或柔性复合材料,连接体为形状记忆合金时,通过控制形状记忆合金的收缩和拉伸程度,使自适应滑块随着轨道弧形弯曲段曲率的改变而改变弯曲程度。
7.进一步的,通过pwm来调节通过形状记忆合金的电流,当pwm置于高电平时,形状记忆合金温度升高,当超过相变温度时,形状记忆合金收缩;当pwm置于低电平时,形状记忆合金温度降低,低于相变温度时,形状记忆合金拉伸;通过调节pwm的占空比主动改变sma的形变,从而改变自适应滑块的弯曲角。
8.进一步的,连接体也可选用柔性复合材料,包括柔性石墨复合材料或复合环氧改性树脂。
9.进一步的,所述滚轮通过转轴连接于自适应滑块侧面,所述滚轮与转轴之间通过记忆合金材料或柔性复合材料连接。
10.进一步的,所述滚轮设有上下两排,轨道卡于上排滚轮与下排滚轮之间。
11.进一步的,线圈绕组分为若干段并分段供电。
12.有益效果:
13.与现有的技术比较,本发明的优点是:通过圆弧过渡方式实现滑块的空间运动方向平滑过渡,解决传统轨道运动系统只能在水平面内运动而无法竖直运动的问题,满足运动多样化需求。采用的磁驱驱动相较于旋转电动机而言,没有机械接触,传动力是在气隙中产生的,除导轨以外没有任何其它的摩擦。同时,本驱动方式还具有过渡平稳、加速度大、精度和重复精度高等特点。直接传动的特点也使得本发明具有高推力密度和很快的动态响应,使滑块能够适应骤起骤停的命令。最后本发明无中间传动结构,结构简单、损耗小,使其与其它轨道运动系统相比,具有很大的优越性。
附图说明
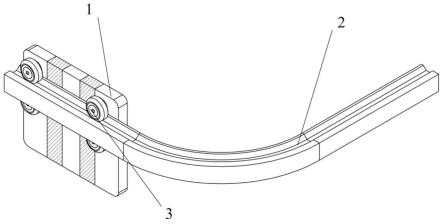
14.图1为本发明立体平滑过渡轨道运动系统的整体结构图。
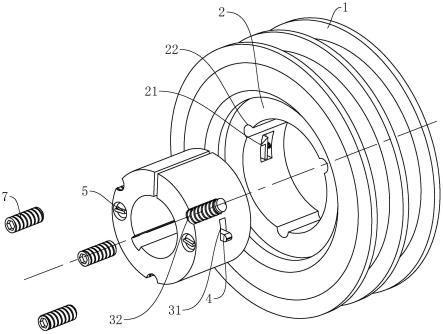
15.图2为滑块结构示意图。
16.图3为滑块处于弯曲状态的示意图。
17.图4为滚轮结构示意图。
18.图5为轨道结构示意图。
具体实施方式
19.请结合图1所示,本发明公开一种基于磁驱动自适应柔性滑块的立体平滑过渡轨道运动系统,包括自适应滑块1、轨道2、安装在自适应滑块1上的滚轮3。所述轨道2中包含至少一端弧形弯曲段,在本实施方式中,该弧形弯曲段的两端分别连接一段水平轨道以及一段相对该水平轨道垂直的垂直轨道。所述滚轮3设有上下两排,轨道2卡于上排滚轮与下排滚轮之间。且轨道2的上表面及下表面均设有沿轨道延伸方向设置供滚轮3限位的凹槽。滚轮3承载于轨道2上并沿着轨道2滚动。
20.请结合图2及图5所示,轨道2内设有沿轨道延伸方向排列的若干线圈绕组7。所述自适应滑块1包括并排设置的若干主板及连接相邻两个主板之间的连接体5;所述主板内部设有永磁体4。通电的线圈产生磁场,通过磁感效应驱动自适应滑块1运动。同时可以通过改变线圈绕组的电流方向及大小,实现自适应滑块1的精准控制。通过该种永磁体4与线圈绕组7产生磁场的磁驱接电自主运动,仅依靠滚轮实现滑块在轨道上的对心定位,机械接触少,摩擦小,传动效率高。
21.根据实际的行程设计需求,合理设计线圈绕组的数量和尺寸。线圈绕组7可以分为若干段并分段供电,例如,自适应滑块1已经通过的轨道部分中的线圈绕组7由于不再与自适应滑块1配合,可以停止供电,从而大大的降低了系统的总体功耗,提高了系统的效率。
22.请结合图2及图3所示,由于自适应滑块1需要通过轨道的弧形弯曲段,故当自适应滑块1沿弧形弯曲段运动时,该自适应滑块1的整体结构也需要弯曲已与弧形弯曲段适配。在本实施方式中,所述连接体5为形状记忆合金(sma),通过控制形状记忆合金的收缩和拉伸程度,使自适应滑块1随着轨道弧形弯曲段曲率的改变而改变弯曲程度。本发明选用脉冲宽度调制(pwm)方法来调节通过形状记忆合金的电流,从而控制形状记忆合金的收缩和拉伸程度,以实现柔性模块能随着轨道曲率的改变而改变,如图3所示。当pwm置于高电平时,使sma温度升高,当超过马氏体逆相变温度时,sma会有收缩的趋势。当pwm置于低电平时,
sma温度降低,低于相变温度时,sma会有拉伸的趋势。因此可以通过合理的控制方式调节pwm的占空比就可以主动改变sma的形变,从而改变自适应滑块1的弯曲角。进一步的,连接体5也可选用柔性复合材料,包括柔性石墨复合材料或复合环氧改性树脂等这些本身抗弯性能较好的材料,以实现对圆弧过渡轨道的被动式自适应。
23.请再参阅图4所示,所述滚轮3通过转轴连接于自适应滑块1侧面,所述滚轮与转轴之间通过记忆合金材料或柔性复合材料6连接,在运动方向改变时能够自适应的随轨道曲率发生一定的形变,使滚轮与轴可以呈一定的弯曲角,从而实现滚轮可以自如地通过轨道的弧形弯曲段。
24.通过该自适应滑块1与轨道2的设计,使轨道2可以设置为多种角度的弯折轨道,甚至是不规则轨迹的轨道,能够针对不同安装空间环境实现滑块运动的多样化,且能够保证装置在两轨道间实现平稳顺畅过渡以及预定轨迹的高精度实现。通过直接传动的特点也使得本发明具有高推力密度和很快的动态响应,使滑块能够适应骤起骤停的命令。最后本发明无中间传动结构,结构简单、损耗小,使其与其它轨道运动系统相比,具有很大的优越性。柔性连接体可选用主动适应方案或被动自适应方案,其中主动适应方案精度高,实现效果好,被动自适应方案简单,便于实施。
25.另外,本发明的具体实现方法和途径很多,以上所述仅是本发明的优选实施方式。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种基于磁驱动自适应柔性滑块的立体平滑过渡轨道运动系统,其特征在于:包括自适应滑块(1)、轨道(2)、安装在自适应滑块(1)上的滚轮(3);所述轨道(2)中包含至少一端弧形弯曲段,且轨道(2)内设有沿轨道延伸方向排列的若干线圈绕组(7);所述滚轮(3)承载于轨道(2)上并沿着轨道(2)滚动;所述自适应滑块(1)包括并排设置的若干主板及连接相邻两个主板之间的连接体(5);所述主板内部设有永磁体(4);线圈绕组(7)通电产生磁场时,通过磁感效应驱动永磁体(4)带动自适应滑块(1)沿轨道滑动;所述连接体(5)为形状记忆合金或柔性复合材料,连接体(5)为形状记忆合金时,通过控制形状记忆合金的收缩和拉伸程度,使自适应滑块(1)随着轨道弧形弯曲段曲率的改变而改变弯曲程度。2.根据权利要求1所述的立体平滑过渡轨道运动系统,其特征在于:通过pwm来调节通过形状记忆合金的电流,当pwm置于高电平时,形状记忆合金温度升高,当超过相变温度时,形状记忆合金收缩;当pwm置于低电平时,形状记忆合金温度降低,低于相变温度时,形状记忆合金拉伸;通过调节pwm的占空比主动改变sma的形变,从而改变自适应滑块(1)的弯曲角。3.根据权利要求2所述的立体平滑过渡轨道运动系统,其特征在于:连接体(5)选用柔性复合材料,包括柔性石墨复合材料或复合环氧改性树脂。4.根据权利要求1或2或3所述的立体平滑过渡轨道运动系统,其特征在于:所述滚轮(3)通过转轴连接于自适应滑块(1)侧面,所述滚轮与转轴之间通过记忆合金材料或柔性复合材料连接。5.根据权利要求4所述的立体平滑过渡轨道运动系统,其特征在于:所述滚轮(3)设有上下两排,轨道卡于上排滚轮与下排滚轮之间。6.根据权利要求1或2或3所述的立体平滑过渡轨道运动系统,其特征在于:线圈绕组分为若干段并分段供电。
技术总结
本发明提出了一种基于磁驱动自适应柔性滑块的立体平滑过渡轨道运动系统,包括自适应滑块、轨道、滚轮;轨道中包含至少一端弧形弯曲段,且轨道内设有沿轨道延伸方向排列的若干线圈绕组;自适应滑块内包括永磁体和形状记忆合金;通过磁感效应驱动永磁体带动自适应滑块沿轨道滑动所述滚轮承载于轨道上并沿着轨道滚动;过圆弧过渡方式实现滑块的空间运动方向平滑过渡,解决传统轨道运动系统只能在水平面内运动而无法竖直运动的问题,满足运动多样化需求。采用的磁驱驱动相较于旋转电动机而言,没有机械接触,传动力是在气隙中产生的,除导轨以外没有任何其它的摩擦。同时,本驱动方式还具有过渡平稳、加速度大、精度和重复精度高等特点。特点。特点。
技术研发人员:贾斯尧 鞠锋 陈柏 吴洪涛
受保护的技术使用者:南京航空航天大学
技术研发日:2022.07.15
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。