1.本发明涉及缠绕设备领域,特别是涉及一种生产玻璃钢化粪池的缠绕设备。
背景技术:
2.随着化粪池的不断创新,玻璃钢化粪池拥有抗压能力强,耐腐蚀,安装简单等优点,逐渐取代传统的化粪池为人们所使用,玻璃钢化粪池在进行生产时,需要通过缠绕设备将纤维进行缠绕处理。
3.传统的缠绕设备,纤维缠绕在缠绕设备上后,需要取下纤维时,需要将一侧的夹板打开,人工将缠绕设备上的纤维取出,由于纤维在缠绕时与缠绕设备紧密贴合,导致人工取出纤维时较为不便,浪费较多的时间;因此,针对上述问题提出一种生产玻璃钢化粪池的缠绕设备。
技术实现要素:
4.为了弥补现有技术的不足,不便取出纤维的问题,本发明提出一种生产玻璃钢化粪池的缠绕设备。
5.本发明解决其技术问题所采用的技术方案是:本发明所述的一种生产玻璃钢化粪池的缠绕设备,包括缠绕筒;所述缠绕筒左侧贴合有第一夹板,且第一夹板左侧转接有气缸,所述缠绕筒右侧固连有第二夹板,且第二夹板右侧设置有电机;所述第一夹板右侧设置有挤压板,且挤压板右侧皆固连有第一连接杆,所述第一连接杆右侧皆固连在第一滑块上,且第一滑块内部插设有限位杆,所述限位杆左端外侧套设有弹簧,且弹簧左端固连在缠绕筒内壁上,所述弹簧右端固连在第一滑块外侧,且第一滑块右侧皆固连有第二连接杆,所述第二连接杆右侧固连有第二滑块,且第二滑块内部插设有限位杆,所述第一滑块和第二滑块外侧皆转接有第三连接杆,且第三连接杆远离第一滑块和第二滑块的一端贯穿缠绕筒转接有顶板,所述顶板靠近缠绕筒的一侧皆贴合缠绕筒外侧,通过设置有挤压板、橡胶垫、第一连接杆、第一滑块、限位杆、弹簧、第二连接杆、第二滑块、第三连接杆和顶板,使纤维在缠绕加工后取出时,更简单便利,节省取出时间,提升加工效率。
6.优选的,所述电机下侧转接有支撑板,且电机下端固连有转板,所述转板下侧贴合支撑板上侧,且转板中端设置有导向机构,所述转板远离电机的一端固连有第二连接板,且第二连接板正面固连有第三连接板,所述第三连接板下侧皆设置有转向轮,通过设置有支撑板、转板、第一连接板、第二连接板、第三连接板、转向轮和限位板,使缠绕后的纤维在取出时,更便利,节省取出时间。
7.优选的,所述第一夹板右侧贴合有橡胶垫,且橡胶垫右侧固连在挤压板上,通过设置有橡胶垫,使第一夹板对橡胶垫进行挤压时,对橡胶垫进行防护。
8.优选的,所述限位杆外侧皆固连有限位块,且限位块左侧皆贴合第一滑块,通过设置有限位块,使第一滑块和第二滑块在移动时,对第一滑块和第二滑块进行限位。
9.优选的,所述第一滑块和第二滑块内部皆插设有滚珠,且滚珠靠近限位杆的一侧
皆贴合限位杆,通过设置有滚珠,使第一滑块和第二滑块在进行移动时,通过滚珠的转动进行辅助移动。
10.优选的,所述顶板设置为弧形,通过将顶板设置为弧形,便于与缠绕筒进行贴合。
11.优选的,四个所述第三连接杆转接在第一滑块和第二滑块外侧,通过设置有四个第三连接杆,使第一滑块和第二滑块在移动时,推动顶板进行扩装和收缩。
12.优选的,所述导向机构包括第一连接板、引导块和引导板,且转板中端固连有第一连接板,所述第一连接板下侧固连有引导块,且引导块下端插设在引导板内部,所述引导板背面固连在支撑板中端,通过设置有导向机构,使转板在转动时,对转板进行引导和限位。
13.优选的,所述支撑板上侧固连有限位板,且限位板外侧贴合转板,通过设置有限位板,使转板在恢复原始位置时,对转板进行限位。
14.优选的,所述引导板设置为弧形,通过将引导板设置为弧形,便于对引导块进行限位,使引导块在引导板内滑动。
15.本发明的有益之处在于:
16.1.本发明通过将纤维进行缠绕加工时,启动气缸,带动第一夹板贴合缠绕筒对缠绕筒进行挤压限位,第一夹板对缠绕筒贴合的过程中,第一夹板对橡胶垫和挤压板进行挤压,使橡胶垫带动第一连接杆推动第一滑块,第一滑块在限位杆的限位下,拉伸弹簧以及推动第二连接杆和第二滑块移动,第一滑块和第二滑块在移动的过程中同步带动第三连接杆,使第三连接杆推动顶板向四周扩张的结构设计,使缠绕后的纤维在缠绕完成后,快速的与缠绕筒进行分离,便于后续的取出,减少分离取出时间,提升工作效率,实现了快速取出缠绕后的纤维的功能,解决了不便取出纤维的问题,提高了加工的效率;
17.2.本发明通过缠绕后的纤维与顶板脱离后,推动缠绕筒,使缠绕筒与支撑板通过转动的连接方式,带动转板在引导装置的引导下将缠绕筒随着转板转动,转板在转动的同时,通过第二连接板、第三连接板和转向轮的辅助进行移动,转出缠绕筒后,将缠绕筒外缠绕后的纤维取出的结构设计,使缠绕后的纤维在取出缠绕筒时,更简单便利,不需要挪动两侧的设备,可以更便利的取出,实现了转动取出的功能,解决了不便取出的问题,提高了取出的便捷性。
18.为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
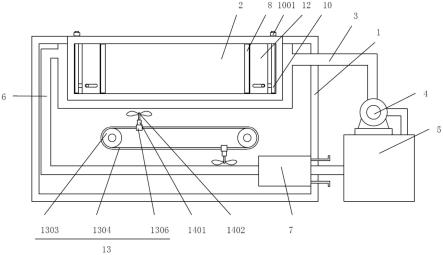
19.图1为实施例一的右侧视结构示意图;
20.图2为实施例一的正视剖面结构示意图;
21.图3为实施例一的第二滑块处右侧视剖面结构示意图;
22.图4为实施例一的图2中a处结构示意图;
23.图5为实施例二的缠绕筒处局部剖面的结构示意图。
24.图中:110、缠绕筒;120、第一夹板;130、气缸;140、第二夹板;150、电机;210、挤压板;220、橡胶垫;230、第一连接杆;240、第一滑块;241、滚珠;250、限位杆;251、限位块;260、弹簧;270、第二连接杆;280、第二滑块;290、第三连接杆;2010、顶板;2020、泡沫垫;310、支撑板;320、转板;330、第一连接板;331、引导块;332、引导板;340、第二连接板;350、第三连接板;360、转向轮;370、限位板。
具体实施方式
25.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
26.需要理解的是,在本技术的描述中,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,也即,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。此外,除非另有说明,“多个”的含义是两个或两个以上。
27.需要说明的是,在本技术的描述中,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”、“空心”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
28.实施例一
29.请参阅图1-4所示,一种生产玻璃钢化粪池的缠绕设备,包括缠绕筒110;所述缠绕筒110左侧贴合有第一夹板120,且第一夹板120左侧转接有气缸130,所述缠绕筒110右侧固连有第二夹板140,且第二夹板140右侧设置有电机150;所述第一夹板120右侧设置有挤压板210,且挤压板210右侧皆固连有第一连接杆230,所述第一连接杆230右侧皆固连在第一滑块240上,且第一滑块240内部插设有限位杆250,所述限位杆250左端外侧套设有弹簧260,且弹簧260左端固连在缠绕筒110内壁上,所述弹簧260右端固连在第一滑块240外侧,且第一滑块240右侧皆固连有第二连接杆270,所述第二连接杆270右侧固连有第二滑块280,且第二滑块280内部插设有限位杆250,所述第一滑块240和第二滑块280外侧皆转接有第三连接杆290,且第三连接杆290远离第一滑块240和第二滑块280的一端贯穿缠绕筒110转接有顶板2010,所述顶板2010靠近缠绕筒110的一侧皆贴合缠绕筒110外侧;工作时,将纤维进行缠绕加工时,启动气缸130,带动第一夹板120贴合缠绕筒110对缠绕筒110进行挤压限位,第一夹板120对缠绕筒110贴合的过程中,第一夹板120对橡胶垫220和挤压板210进行挤压,使橡胶垫220带动第一连接杆230推动第一滑块240,第一滑块240在限位杆250的限位下,拉伸弹簧260以及推动第二连接杆270和第二滑块280移动,第一滑块240和第二滑块280在移动的过程中同步带动第三连接杆290,使第三连接杆290推动顶板2010向四周扩张,第一夹板120贴合缠绕筒110后,将纤维的一端与顶板2010连接后启动电机150,电机150输出端带动第二夹板140和第一夹板120转动,通过缠绕筒110的转动带动顶板2010对纤维进行缠绕处理。
30.所述电机150下侧转接有支撑板310,且电机150下端固连有转板320,所述转板320下侧贴合支撑板310上侧,且转板320中端设置有导向机构,所述转板320远离电机150的一端固连有第二连接板340,且第二连接板340正面固连有第三连接板350,所述第三连接板
350下侧皆设置有转向轮360;工作时,缠绕后的纤维与顶板2010脱离后,推动缠绕筒110,使缠绕筒110与支撑板310通过转动的连接方式,带动转板320在引导装置的引导下将缠绕筒110随着转板320转动,转板320在转动的同时,通过第二连接板340、第三连接板350和转向轮360的辅助进行移动,转出缠绕筒110后,将缠绕筒110外缠绕后的纤维取出。
31.所述第一夹板120右侧贴合有橡胶垫220,且橡胶垫220右侧固连在挤压板210上;工作时,第一夹板120挤压橡胶垫220,使橡胶垫220推动挤压板210移动。
32.所述限位杆250外侧皆固连有限位块251,且限位块251左侧皆贴合第一滑块240;工作时,第一滑块240在移动时,通过与限位块251贴合,对第一滑块240进行限位。
33.所述第一滑块240和第二滑块280内部皆插设有滚珠241,且滚珠241靠近限位杆250的一侧皆贴合限位杆250;工作时,第一滑块240和第二滑块280在移动时,通过滚珠241的辅助转动进行移动。
34.所述顶板2010设置为弧形;工作时,将限位缠绕在顶板2010上,通过顶板2010的转动对限位进行缠绕处理。
35.四个所述第三连接杆290转接在第一滑块240和第二滑块280外侧;工作时,第一滑块240和第二滑块280移动的过程中,带动第三连接杆290推动顶板2010。
36.所述导向机构包括第一连接板330、引导块331和引导板332,且转板320中端固连有第一连接板330,所述第一连接板330下侧固连有引导块331,且引导块331下端插设在引导板332内部,所述引导板332背面固连在支撑板310中端;工作时,转板320在移动时,通过第一连接板330、引导块331和引导板332进行引导。
37.所述支撑板310上侧固连有限位板370,且限位板370外侧贴合转板320;工作时,转板320在恢复原始位置时,通过与限位板370贴合,对转板320进行限位。
38.所述引导板332设置为弧形;工作时,引导块331在引导板332内滑动,对转板320进行引导限位。
39.实施例二
40.请参阅图5所示,对比实施例一,作为本发明的另一种实施方式,所述第一夹板120右侧贴合有泡沫垫2020,且泡沫垫2020右侧固连在挤压板210上;工作时,第一夹板120挤压泡沫垫2020,使泡沫垫2020推动挤压板210移动。
41.工作原理,将纤维进行缠绕加工时,启动气缸130,带动第一夹板120贴合缠绕筒110对缠绕筒110进行挤压限位,第一夹板120对缠绕筒110贴合的过程中,第一夹板120对橡胶垫220和挤压板210进行挤压,使橡胶垫220带动第一连接杆230推动第一滑块240,第一滑块240在限位杆250的限位下,拉伸弹簧260以及推动第二连接杆270和第二滑块280移动,第一滑块240和第二滑块280在移动的过程中同步带动第三连接杆290,使第三连接杆290推动顶板2010向四周扩张,第一夹板120贴合缠绕筒110后,将纤维的一端与顶板2010连接后启动电机150,电机150输出端带动第二夹板140和第一夹板120转动,通过缠绕筒110的转动带动顶板2010对纤维进行缠绕处理,缠绕结束后,关闭电机150和气缸130,使气缸130带动第一夹板120脱离缠绕筒110,第一夹板120脱离后,第一连接杆230、第一滑块240、第二连接杆270、第二滑块280、第三连接杆290和顶板2010在弹簧260的弹性势能下恢复原始工作状态,顶板2010回缩的同时,缠绕后的纤维与顶板2010脱离。
42.缠绕后的纤维与顶板2010脱离后,推动缠绕筒110,使缠绕筒110与支撑板310通过
转动的连接方式,带动转板320在引导装置的引导下将缠绕筒110随着转板320转动,转板320在转动的同时,通过第二连接板340、第三连接板350和转向轮360的辅助进行移动,转出缠绕筒110后,将缠绕筒110外缠绕后的纤维取出。
43.相对于现有技术,本发明通过将纤维进行缠绕加工时,启动气缸,带动第一夹板贴合缠绕筒对缠绕筒进行挤压限位,第一夹板对缠绕筒贴合的过程中,第一夹板对橡胶垫和挤压板进行挤压,使橡胶垫带动第一连接杆推动第一滑块,第一滑块在限位杆的限位下,拉伸弹簧以及推动第二连接杆和第二滑块移动,第一滑块和第二滑块在移动的过程中同步带动第三连接杆,使第三连接杆推动顶板向四周扩张的结构设计,使缠绕后的纤维在缠绕完成后,快速的与缠绕筒进行分离,便于后续的取出,减少分离取出时间,提升工作效率,实现了快速取出缠绕后的纤维的功能,解决了不便取出纤维的问题,提高了加工的效率。
44.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。