1.本发明属于傅里叶红外干涉仪智能控制技术领域,具体涉及傅里叶红外干涉仪的控制方法、系统及可读存储介质。
背景技术:
2.傅里叶红外光谱技术已成为红外光谱分析的主要手段之一,这是由于大气中的微量、痕量气体大多是红外活性气体,在2~30μm波段范围内具有吸收和发射红外特征光谱的特性,上述波段范围属于中红外区指纹波段,对于光谱测量非常有利。其中,傅里叶红外光谱技术,利用分光束干涉原理,将迈克尔逊干涉仪、调制技术与计算机技术相结合,并通过傅里叶变换的方法,实现由干涉图到光谱的还原,再根据得到的光谱学反演出待测气体的浓度。因此,傅里叶红外光谱技术在空气污染物监测中得以广泛应用。
3.傅里叶红外干涉仪是傅里叶红外光谱技术的核心部件,干涉仪在运行过程中摇臂始终按照一定频率往复摆动,精确控制摇臂的摆动是产生高精度光谱的关键所在。
技术实现要素:
4.基于现有技术中存在的上述缺点和不足,本发明的目的是提供傅里叶红外干涉仪的控制方法、系统及可读存储介质。
5.为了达到上述发明目的,本发明采用以下技术方案:傅里叶红外干涉仪的控制方法,所述傅里叶红外干涉仪包括摇臂和设于摇臂的动镜,摇臂采用电磁线圈与磁铁的组合进行驱动,对电磁线圈施加周期性电流信号以驱动摇臂及动镜往复运动,所述控制方法包括以下步骤:s1、采集电磁线圈的电流信号,以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离;s2、判断摇臂的当前摆动距离是否处于预设摆动距离区间内;若否,则转至步骤s3;s3、判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;若是,则根据第一预设改变量调大电流信号的峰峰值;若否,则根据第二预设改变量调小电流信号的峰峰值;s4、选取目标周期内干涉图中信号强度最高的信号点作为零光程差点,判断零光程差点是否处于目标周期内干涉图的中间区域;若否,则转至步骤s5;s5、判断零光程差点是否早于目标周期内干涉图的中间区域出现;若是,则根据第三预设改变量调整电流信号的电流平均值;若否,则根据第四预设改变量调整电流信号的电流平均值。
6.作为优选方案,所述步骤s1中,摇臂的当前摆动距离s为:其中,n为目标周期内干涉图的信号点的数目,λ为傅里叶红外干涉仪的激光器的
波长。
7.作为优选方案,所述步骤s3中,第一预设改变量为:其中,s1为预设摆动距离区间的最小值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
8.作为优选方案,所述步骤s3中,第二预设改变量为:其中,s2为预设摆动距离区间的最大值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
9.作为优选方案,所述磁铁有四块,两两分别位于电磁线圈的两侧且相对,位于同一侧的相邻磁铁的极性相反,位于不同侧的相对磁铁的极性相同。
10.作为优选方案,所述步骤s5中,根据第三预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;其中,第二预设极性组合状态与第一预设极性组合状态相反;所述步骤s5中,根据第四预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标
周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值。
11.作为优选方案,所述第三预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离,目标周期内干涉图的中间区域为,为位置偏差阈值。
12.作为优选方案,所述第四预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离,目标周期内干涉图的中间区域为,为位置偏差阈值。
13.本发明还提供傅里叶红外干涉仪的控制系统,应用如上任一项方案所述的控制方法,所述控制系统包括:采集模块,用于采集电磁线圈的电流信号;计算模块,用于以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离;判断模块,用于判断摇臂的当前摆动距离是否处于预设摆动距离区间内,还用于判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;选取模块,用于选取目标周期内干涉图中信号强度最高的信号点作为零光程差点;相应地,所述判断模块还用于判断零光程差点是否处于目标周期内干涉图的中间区域,
还用于判断零光程差点是否早于目标周期内干涉图的中间区域出现;执行模块,用于根据判断模块的判断结果执行相应的操作。
14.本发明还提供一种可读存储介质,所述可读存储介质中存储有指令,当指令在计算机上运行时,使得计算机执行如上任一项方案所述的控制方法。
15.本发明与现有技术相比,有益效果是:本发明的傅里叶红外干涉仪的控制方法、系统及可读存储介质,对干涉图进行分析,基于干涉图的分析结果对电流信号的峰峰值以及电流平均值进行调整,从而精确控制摇臂摆动的位置和距离满足要求,控制精度达到微米级别。
附图说明
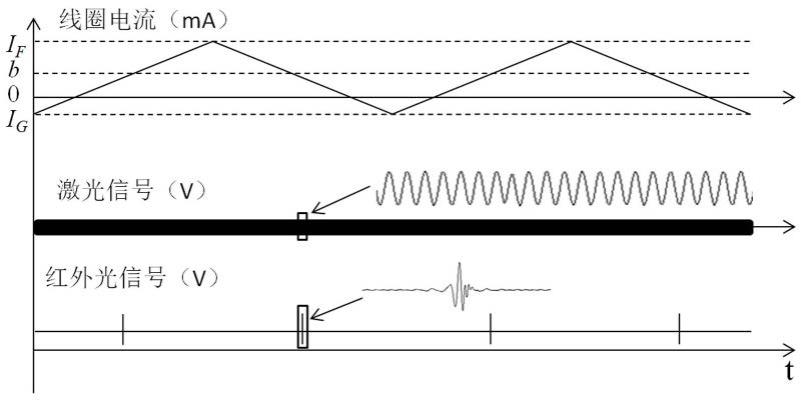
16.图1是本发明实施例的傅里叶红外干涉仪的构架图;图2是本发明实施例的同步的线圈电流信号、激光信号及其局部放大、红外光信号及其局部放大的谱图;图3是本发明实施例的傅里叶红外干涉仪的控制方法的流程图;图4是本发明应用示例的磁铁和线圈安装示意图;图5是本发明实施例的傅里叶红外干涉仪的控制系统的构架图。
具体实施方式
17.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
18.如图1所示,本发明实施例的傅里叶红外干涉仪为现有的傅里叶红外干涉仪,主要包括红外光源1、激光器2、反射镜3、分光镜4、角镜5、摇臂6、磁铁7、电磁线圈8、红外检测器9、激光检测器10和处理器11。其中,角镜(即动镜)设于摇臂,摇臂采用电磁线圈与磁铁的组合进行驱动,对电磁线圈施加周期性电流信号,即可驱动摇臂及动镜往复运动;上述各部件的具体构造可以参考现有技术,在此不赘述。
19.其中,磁铁有四片,两两分别位于电磁线圈的两侧且相对,位于同一侧的相邻磁铁的极性相反,位于不同侧的相对磁铁的极性相同。当电流经过电磁线圈时会产生磁力,驱使摇臂向一侧摆动;当电流反向时,磁力极性反转,摇臂则摆向另一侧。对电磁线圈施加周期性的电流,即可实现摇臂的往复运动。
20.本发明实施例的傅里叶红外干涉仪的工作原理为:红外光源发出的红外光束经过分光镜形成两束红外光,两束红外光分别到达两处角镜并被反射回分光镜处;再次经过分光镜后,两束光合并形成干涉光;其中,有一半的干涉光射向光源方向,另一半干涉光射向红外检测器;红外检测器采集干涉光的信号,当摇臂不停摆动时,两束红外光的光程差不断变化,因此形成的干涉光强度不断变化。另有一路激光器发射单一波长的激光,经过分光镜形成两束激光,两束激光分别到达两处角镜并被反射回分光镜处;再次经过分光镜后,两束光合并形成干涉光;其中,有一半的干涉光射向激光器方向,另一半干涉光射向激光检测器;激光检测器采集干涉光的信号,当摇臂不停摆动
时,两束激光的光程差不断变化,因此形成的干涉光强度不断变化,呈现正弦波的形状。
21.其中,激光波长为λ(单位μm),每经过一个激光信号周期代表摇臂摆动距离为λ。如图2所示,分别为同步采集的电磁线圈的线圈电流、激光检测器采集的激光信号和红外检测器采集的红外光信号,挑选出激光信号的高点同步的红外光信号作为信号点,信号点依序排布即可得到干涉图,干涉图中相邻信号点之间的距离为λ;对干涉图进行傅里叶变换即可得到光谱,具体可参考现有技术,在此不赘述。其中,线圈电流的波峰值为if、波谷值为ig、电流平均值为b。为了精确控制摆动的位置和距离,对干涉图进行分析,并根据分析结果自动调整电磁线圈的电流,使摇臂摆动的位置和距离符合要求。
22.如图3所示,本发明实施例的傅里叶红外干涉仪的控制方法,包括以下步骤:s1、采集电磁线圈的电流信号,以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离。
23.具体地,根据电磁线圈的电流信号作为周期判定依据,电流信号的相邻峰谷之间作为一个目标周期,即电流信号的相邻的波峰与波谷之间作为周期中断点,进行目标周期的截取。
24.其中,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离s为:其中,n为目标周期内干涉图的信号点的数目,λ为傅里叶红外干涉仪的激光器的波长。干涉图即以1至n依序排布的信号点的集合。
25.s2、判断摇臂的当前摆动距离是否处于预设摆动距离区间内;若否,则转至步骤s3。
26.具体地,摇臂的摆动距离应符合干涉仪预设分辨率所需的摆动距离,即在预设摆动距离区间[s1,s2]内,则符合要求。
[0027]
在上述判断结果为否时,存在以下两种情况:第一种为s<s1,第二种为s>s2,故进行下一步骤的判断。
[0028]
s3、判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;若是,则根据第一预设改变量调大电流信号的峰峰值;若否,则根据第二预设改变量调小电流信号的峰峰值。其中,电流信号的峰峰值为信号最高值与最低值之间差的值。
[0029]
若s<s1,则应该调大电流信号的峰峰值。具体地,根据第一预设改变量调大电流信号的峰峰值;对于电流信号的波峰值,由原波峰值if调整为;对于电流信号的波谷值,由原波谷值ig调整为,电流平均值保持不变,而电流信号的峰峰值由调整为。
[0030]
其中,第一预设改变量为:其中,s1为预设摆动距离区间的最小值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0031]
若s>s2,则应该调小电流信号的峰峰值。具体地,根据第二预设改变量调小电流信号的峰峰值;对于电流信号的波峰值,由原波峰值if调整为;对于电流信号的波谷值,由原波谷值ig调整为,电流平均值保持不变,而电流信号的峰峰值由调整为。
[0032]
其中,第二预设改变量为:其中,s2为预设摆动距离区间的最大值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0033]
因此,电流信号的峰峰值变化量和摆动距离变化量的关系与线圈匝数、摇臂的重量大小、磁铁作用于电磁线圈的磁力大小、电磁线圈与摇臂的转动支点之间的距离等参数相关。
[0034]
在实际应用中,可通过手动调节峰值后测量摇臂的摆动距离,从而确定参数间的关系。例如:线圈匝数100圈,摇臂的重量100g,磁铁选用钕铁硼强力磁铁,电流峰峰值调节0.1ma,摇臂摆动距离变化10μm;若s<s1,则;若s>s2,则。
[0035]
s4、选取目标周期内干涉图中信号强度最高的信号点作为零光程差点,判断零光程差点是否处于目标周期内干涉图的中间区域;若否,则转至步骤s5。
[0036]
其中,零光程差点的位置n0应该位于干涉图中间附近的位置,才符合要求。具体地,目标周期内干涉图的中间区域为,为位置偏差阈值。
[0037]
在上述判断结果为否时,存在以下两种情况:第一种为,第二种为,故进行下一步骤的判断。
[0038]
s5、判断零光程差点是否早于目标周期内干涉图的中间区域出现;若是,则根据第三预设改变量调整电流信号的电流平均值;若否,则根据第四预设改变量调整电流信号的电流平均值。
[0039]
其中,根据第三预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标
周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;其中,第二预设极性组合状态与第一预设极性组合状态相反,即各磁铁的极性反向即可由第一预设极性组合状态转换为第二预设极性组合状态。
[0040]
根据第四预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值。
[0041]
为了便于理解,如图4所示,各磁铁处于第一预设极性组合状态,电磁线圈的电流i为顺时针方向,目标周期为电流上升周期为例进行详细说明,其他情形以此类推,在此不赘述。
[0042]
若,则应该调大电流信号的电流平均值。具体地,根据第三预设改变量调大电流信号的电流平均值,即电流信号的电流平均值由原电流平均值b调整为。其中,第三预设改变量为:
其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0043]
若,则应该调小电流信号的电流平均值。具体地,根据第四预设改变量调小电流信号的电流平均值,即电流信号的电流平均值由原电流平均值b调整为。其中,第四预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0044]
在实际应用中,可通过手动调节电流平均值后观察摇臂摆动位置确定这两个参数间的关系。例如,线圈匝数100圈,摇臂质量100g,磁铁选用钕铁硼强力磁铁,线圈到摇臂转轴距离3cm时,电流平均值调节0.1ma,摇臂摆动位置变化10μm,即n0改变10/λ,应用时通常选择使用1.6μm波长的激光器,即n0改变6.25。
[0045]
若,则;若,则。
[0046]
另外,本发明实施例的上述步骤s2与步骤s4可以同步执行,也可以异步执行;异步执行时,不分执行的顺序。
[0047]
基于本发明实施例的上述傅里叶红外干涉仪的控制方法,如图5所示,本发明实施例还提供傅里叶红外干涉仪的控制系统包括采集模块、计算模块、判断模块、选取模块和执行模块。
[0048]
具体地,本实施例的采集模块用于采集电磁线圈的电流信号。
[0049]
本实施例的计算模块用于以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离。
[0050]
具体地,根据电磁线圈的电流信号作为周期判定依据,电流信号的相邻峰谷之间作为一个目标周期,即电流信号的相邻的波峰与波谷之间作为周期中断点,进行目标周期的截取。
[0051]
其中,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离s为:其中,n为目标周期内干涉图的信号点的数目,λ为傅里叶红外干涉仪的激光器的波长。干涉图即以1至n依序排布的信号点的集合。
[0052]
本实施例的判断模块用于判断摇臂的当前摆动距离是否处于预设摆动距离区间内。具体地,摇臂的摆动距离应符合干涉仪预设分辨率所需的摆动距离,即在预设摆动距离区间[s1,s2]内,则符合要求。
[0053]
在上述判断结果为否时,存在以下两种情况:第一种为s<s1,第二种为s>s2,故进行下一步骤的判断。
[0054]
本实施例的判断模块还用于判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;若是,则根据第一预设改变量调大电流信号的峰峰值;若否,则根据第二预设改变量调小电流信号的峰峰值。
[0055]
若s<s1,则应该调大电流信号的峰峰值。具体地,根据第一预设改变量调大电流信号的峰峰值;对于电流信号的波峰值,由原波峰值if调整为;对于电流信号的波谷值,由原波谷值ig调整为,电流平均值保持不变,而电流信号的峰峰值由调整为。
[0056]
其中,第一预设改变量为:其中,s1为预设摆动距离区间的最小值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0057]
若s>s2,则应该调小电流信号的峰峰值。具体地,根据第二预设改变量调小电流信号的峰峰值;对于电流信号的波峰值,由原波峰值if调整为;对于电流信号的波谷值,由原波谷值ig调整为,电流平均值保持不变,而电流信号的峰峰值由调整为。
[0058]
其中,第二预设改变量为:其中,s2为预设摆动距离区间的最大值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0059]
因此,电流信号的峰峰值变化量和摆动距离变化量的关系与线圈匝数、摇臂的重量大小、磁铁作用于电磁线圈的磁力大小、电磁线圈与摇臂的转动支点之间的距离等参数相关。
[0060]
在实际应用中,可通过手动调节峰值后测量摇臂的摆动距离,从而确定参数间的
关系。例如:线圈匝数100圈,摇臂的重量100g,磁铁选用钕铁硼强力磁铁,电流峰峰值调节0.1ma,摇臂摆动距离变化10μm;若s<s1,则;若s>s2,则。
[0061]
本实施例的选取模块用于选取目标周期内干涉图中信号强度最高的信号点作为零光程差点。
[0062]
本实施例的判断模块还用于判断零光程差点是否处于目标周期内干涉图的中间区域。其中,零光程差点的位置n0应该位于干涉图中间附近的位置(即中间区域),才符合要求。
[0063]
具体地,目标周期内干涉图的中间区域为,为位置偏差阈值。
[0064]
在上述判断结果为否时,存在以下两种情况:第一种为,第二种为,故进行下一步骤的判断。
[0065]
本实施例的判断模块还用于判断零光程差点是否早于目标周期内干涉图的中间区域出现;若是,则由本实施例的执行模块根据第三预设改变量调整电流信号的电流平均值;若否,则由本实施例的执行模块根据第四预设改变量调整电流信号的电流平均值。
[0066]
其中,根据第三预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;其中,第二预设极性组合状态与第一预设极性组合状态相反,即各磁铁的极性反向即可由第一预设极性组合状态转换为第二预设极性组合状态。
[0067]
根据第四预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值。
[0068]
为了便于理解,如图4所示,各磁铁处于第一预设极性组合状态,电磁线圈的电流i为顺时针方向,目标周期为电流上升周期为例进行详细说明,其他情形以此类推,在此不赘述。
[0069]
若,则应该调大电流信号的电流平均值。具体地,根据第三预设改变量调大电流信号的电流平均值,即电流信号的电流平均值由原电流平均值b调整为。其中,第三预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0070]
若,则应该调小电流信号的电流平均值。具体地,根据第四预设改变量调小电流信号的电流平均值,即电流信号的电流平均值由原电流平均值b调整为。其中,第四预设改变量为:
其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。
[0071]
在实际应用中,可通过手动调节电流平均值后观察摇臂摆动位置确定这两个参数间的关系。例如,线圈匝数100圈,摇臂质量100g,磁铁选用钕铁硼强力磁铁,线圈到摇臂转轴距离3cm时,电流平均值调节0.1ma,摇臂摆动位置变化10μm,即n0改变10/λ,应用时通常选择使用1.6μm波长的激光器,即n0改变6.25。
[0072]
若,则;若,则。
[0073]
本发明实施例还提供可读存储介质,可读存储介质中存储有指令,当指令在计算机上运行时,使得计算机执行本发明实施例上述的控制方法。其中,可读存储介质可烧录于电流控制芯片,实现动镜运动的智能控制。
[0074]
以上所述仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
