技术特征:
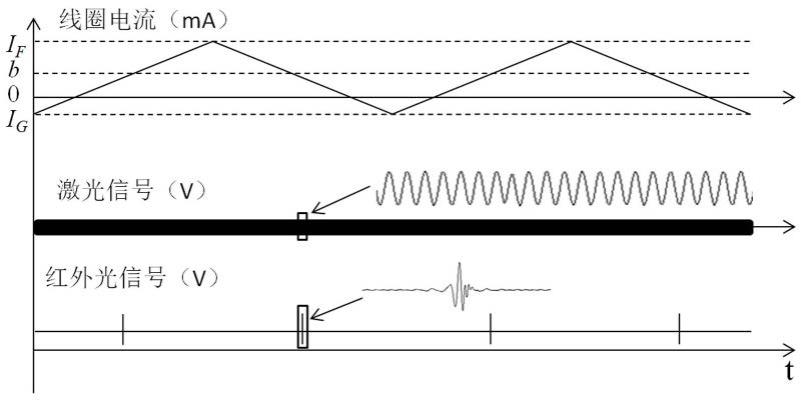
1.傅里叶红外干涉仪的控制方法,所述傅里叶红外干涉仪包括摇臂和设于摇臂的动镜,摇臂采用电磁线圈与磁铁的组合进行驱动,对电磁线圈施加周期性电流信号以驱动摇臂及动镜往复运动,其特征在于,所述控制方法包括以下步骤:s1、采集电磁线圈的电流信号,以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离;s2、判断摇臂的当前摆动距离是否处于预设摆动距离区间内;若否,则转至步骤s3;s3、判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;若是,则根据第一预设改变量调大电流信号的峰峰值;若否,则根据第二预设改变量调小电流信号的峰峰值;s4、选取目标周期内干涉图中信号强度最高的信号点作为零光程差点,判断零光程差点是否处于目标周期内干涉图的中间区域;若否,则转至步骤s5;s5、判断零光程差点是否早于目标周期内干涉图的中间区域出现;若是,则根据第三预设改变量调整电流信号的电流平均值;若否,则根据第四预设改变量调整电流信号的电流平均值。2.根据权利要求1所述的傅里叶红外干涉仪的控制方法,其特征在于,所述步骤s1中,摇臂的当前摆动距离s为:其中,n为目标周期内干涉图的信号点的数目,λ为傅里叶红外干涉仪的激光器的波长。3.根据权利要求2所述的傅里叶红外干涉仪的控制方法,其特征在于,所述步骤s3中,第一预设改变量为:其中,s1为预设摆动距离区间的最小值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。4.根据权利要求2所述的傅里叶红外干涉仪的控制方法,其特征在于,所述步骤s3中,第二预设改变量为:其中,s2为预设摆动距离区间的最大值,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离。5.根据权利要求2所述的傅里叶红外干涉仪的控制方法,其特征在于,所述磁铁有四块,两两分别位于电磁线圈的两侧且相对,位于同一侧的相邻磁铁的极性相反,位于不同侧的相对磁铁的极性相同。6.根据权利要求5所述的傅里叶红外干涉仪的控制方法,其特征在于,所述步骤s5中,根据第三预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流
信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调大电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第三预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第三预设改变量调小电流信号的电流平均值;其中,第二预设极性组合状态与第一预设极性组合状态相反;所述步骤s5中,根据第四预设改变量调整电流信号的电流平均值,包括:若各磁铁处于第一预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值;若各磁铁处于第一预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为顺时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调大电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调小电流信号的电流平均值;若各磁铁处于第二预设极性组合状态、电磁线圈的电流为逆时针方向,判断目标周期为电流上升周期或电流下降周期;若目标周期为电流上升周期,则根据第四预设改变量调小电流信号的电流平均值;若目标周期为电流下降周期,则根据第四预设改变量调大电流信号的电流平均值。7.根据权利要求6所述的傅里叶红外干涉仪的控制方法,其特征在于,所述第三预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离,目标周期内
干涉图的中间区域为,为位置偏差阈值。8.根据权利要求6所述的傅里叶红外干涉仪的控制方法,其特征在于,所述第四预设改变量为:其中,n0为零光程差点的位置,,m为摇臂的重量,b为磁铁作用于电磁线圈的磁力,k为电磁线圈的线圈匝数,d为电磁线圈与摇臂的转动支点之间的距离,目标周期内干涉图的中间区域为,为位置偏差阈值。9.傅里叶红外干涉仪的控制系统,应用如权利要求1-8任一项所述的控制方法,其特征在于,所述控制系统包括:采集模块,用于采集电磁线圈的电流信号;计算模块,用于以电流信号的相邻峰谷之间作为一个目标周期,根据目标周期内干涉图的信号点的数目计算得到摇臂的当前摆动距离;判断模块,用于判断摇臂的当前摆动距离是否处于预设摆动距离区间内,还用于判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;选取模块,用于选取目标周期内干涉图中信号强度最高的信号点作为零光程差点;相应地,所述判断模块还用于判断零光程差点是否处于目标周期内干涉图的中间区域,还用于判断零光程差点是否早于目标周期内干涉图的中间区域出现;执行模块,用于根据判断模块的判断结果执行相应的操作。10.一种可读存储介质,所述可读存储介质中存储有指令,其特征在于,当指令在计算机上运行时,使得计算机执行如权利要求1-8任一项所述的控制方法。
技术总结
本发明涉及傅里叶红外干涉仪的控制方法、系统及可读存储介质,其控制方法包括:采集电磁线圈的电流信号,计算得到摇臂的当前摆动距离;判断摇臂的当前摆动距离是否处于预设摆动距离区间内;若否,则转至判断摇臂的当前摆动距离是否小于预设摆动距离区间的最小值;若是,则调大电流信号的峰峰值;若否,则调小电流信号的峰峰值;选取目标周期内干涉图中信号强度最高的信号点作为零光程差点,判断零光程差点是否处于目标周期内干涉图的中间区域;若否,则转至判断零光程差点是否早于目标周期内干涉图的中间区域出现,并根据不同的判断结果对电流信号的电流平均值进行调整。本发明对摇臂摆动的控制精度高。臂摆动的控制精度高。臂摆动的控制精度高。
技术研发人员:于志伟 张涵 张建清 陈晨 屈颖 周城 唐怀武 于俊库 章成钢
受保护的技术使用者:杭州泽天春来科技有限公司
技术研发日:2022.10.27
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。