1.本发明属于触觉传感器技术领域,具体涉及一种基于磁性传感的柱状结构剪切力传感装置及制备方法。
背景技术:
2.随着机器人技术和人工智能的发展,准确的身体位置感知或运动感知是机器人能够正确操作的关键。尤其对于人机交互(hmi)技术来说,如何准确地感知是一项重大挑战。触觉传感器,作为机器人系统的重要组成部分,用于有效获取接触状态和接触位置以及提高机器人实际操作能力所需的其他信息。触觉传感器的应用满足了智能机器人准确及时感知各种外部物理刺激的需要,更满足了人们对健康舒适生活方式的追求,因此,引起国内外广泛的关注。
3.目前,人工触觉传感器常用的工作机制包括摩擦纳米发电机、电容、压阻、压电、磁阻等。这些传感机制的主要局限性是非线性、信号迟滞、和制造成本昂贵。与其他传导机制相比,基于磁感机制的触觉传感器具有线性度高、低滞后、可重复性高、制造简单和鲁棒性等主要优点。一种典型的传感器概念是利用永磁体与磁性传感器配合,检测永磁性材料在软材料变形期间相对于磁性传感器移动时的磁场变化。以前的大多数传感器都使用刚性永磁体,这会产生耐用性问题。随着软材料的发展,研究人员将硅氧烷-磁粉复合材料组成的柔性永磁体代替之前的刚性磁铁,但是也存在感应力范围内灵敏度低的信号质量问题,并且未发现精确感应剪切力的报道。
技术实现要素:
4.为克服现有技术的不足,本发明公开了一种基于磁性传感的柱状结构剪切力传感装置及制备方法,目的是提高磁性触觉传感器的灵敏度,并能够针对剪切力精确感知。
5.为实现上述目的,本发明的技术方案是:
6.一种基于磁性传感的柱状结构剪切力传感装置,包括:磁性传感器、设于磁性传感器顶端的pdms柔软柱状连接结构、设于pdms柔软柱状连接结构顶端的磁性薄膜。
7.优选的,所述的磁性传感器为磁性gmr传感器,所述的磁性gmr传感器的顶端与柱状结构的底端胶接。
8.优选的,所述的柱状结构有4个,4个柱状结构均匀分布于磁性传感器的上表面。
9.一种基于磁性传感的柱状结构剪切力传感装置的制备方法,包括如下步骤:
10.步骤一、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合均匀,得到pdms混合物;
11.步骤二、准备模具,模具上端设有柱形孔,将pdms混合物倒入柱形孔中,然后进行真空脱泡处理;
12.步骤三、将步骤二中经过真空脱泡处理后带有试样的模具放入干燥箱中进行加热固化,加热温度为50-90℃,加热时间在3-24h;
13.步骤四、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合,然后将200~400目的ndfeb颗粒倒入烧杯中,继续用玻璃棒剧烈搅拌5min以上,直至搅拌成均匀的黑色混合溶液;
14.步骤五、将步骤四中配置的混合溶液均匀旋涂到步骤三中固化好的模具表面,使混合溶液与固化的试样顶端充分接触,然后,将模具放入干燥箱中进行加热固化,加热温度为80-120℃,加热时间为2h以上;
15.步骤六、加热完成后,将步骤五的结构置于磁场中磁化,使得磁性薄膜具有剩磁强度,然后进行脱模,形成pdms柔软柱状连接结构、且pdms柔软柱状连接结构顶端与一层磁性薄膜相连;
16.步骤七、最后将pdms柔软柱状连接结构另一端与磁性gmr传感器用pdms胶黏在一起,得到基于磁性传感的柱状结构剪切力传感装置。
17.优选的,还包括步骤八、检测:将步骤七中的基于磁性传感的柱状结构剪切力传感装置置于固定平台,水平拉伸顶部磁性薄膜,利用电化学工作站测量磁性传感器的电阻变化。
18.优选的,所述的步骤一、四中,固化剂为pdms交联剂(sigma-aldrich,saint louis,mo)。
19.优选的,所述的步骤一中,pdms预聚体的配置量为5~25g,固化剂为0.1~0.8g;所述的步骤四中,pdms预聚体的配置量为2~10g,固化剂为0.2~1g,ndfeb颗粒为15~75g。
20.优选的,所述的步骤一中,pdms预聚体与固化剂的质量比为10:1或20:1或30:1。
21.优选的,所述的步骤二中,模具为pc材料制成,所述的柱形孔有4个,4个柱形孔矩阵分布。
22.本发明一种基于磁性传感的柱状结构剪切力传感装置及制备方法的有益效果为:
23.1.本发明能够实现剪切力的精确感知,并且在较低剪切范围内具有灵敏度高、响应速度快的特点。
24.2.本发明工艺简单,避免了高昂的设备、耗材及复杂的技术结构。
25.3.本发明实现了小尺寸、能够实时测量的传感方式。
26.4.本发明通过调节步骤一中pdms预聚体与固化剂的配比,能够得到具有不同灵敏度的磁性触觉传感装置。
附图说明
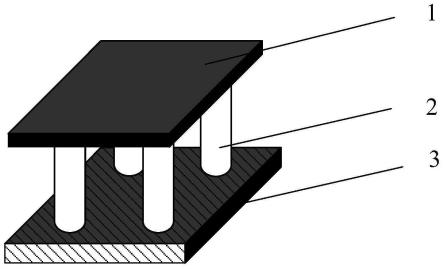
27.图1、基于磁性传感的柱状结构剪切力传感装置的结构示意图;
28.图2、基于磁性传感的柱状结构剪切力传感装置的侧视示意图;
29.图3、基于磁性传感的柱状结构剪切力传感装置制备过程示意图;
30.图4、基于磁性传感的柱状结构剪切力传感装置剪切过程示意图;
31.图5、基于磁性传感的柱状结构剪切力传感装置的磁性薄膜表面垂直中心线上距离-磁场强度变化曲线;
32.图6、基于磁性传感的柱状结构剪切力传感装置在剪切力下(加载/释放)的响应曲线;
33.图7、基于磁性传感的柱状结构剪切力传感装置的力-电阻变化响应曲线;
34.1:磁性薄膜,2:pdms柔软柱状连接结构,3:磁性传感器。
具体实施方式
35.以下所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
36.实施例1:
37.一种基于磁性传感的柱状结构剪切力传感装置,如图1、2所示,包括:磁性传感器3、设于磁性传感器3顶端的pdms柔软柱状连接结构2、设于pdms柔软柱状连接结构2顶端的磁性薄膜1。
38.如图1、2所示,所述的磁性传感器3为磁性gmr传感器,所述的磁性gmr传感器的顶端与柱状结构的底端胶接。
39.如图1、2所示,所述的柱状结构有4个,4个柱状结构均匀分布于磁性传感器3的上表面。
40.本实施例的工作原理为:磁性薄膜1能够自身产生剩磁磁场,底部磁性传感器3的电阻随着自身位置处磁场强度的变化而改变,随着磁性薄膜1相对于磁性传感器3的位置发生改变,磁性传感器3处的磁场强度发生变化,自身的电阻也随之改变。
41.具体来说,如图4所示,对磁性薄膜1施加剪切力过程中,柱状柔性结构2向剪切力方向倾斜,磁性薄膜1与磁性传感器3之间的距离减小,磁场传感器感受的磁场强度越大。磁性薄膜外磁场强度变化与磁性薄膜垂直中心线上距离的关系如图5所示。磁性传感器电阻减小,相对电阻变化值为负,曲线下降,且随着剪切力的继续增大,相对电阻变化的绝对值更大。相反,在释放模式下,剪切力减小,磁性薄膜1与磁性传感器3之间的距离增大,磁场传感器感受的磁场强度变小,电阻变大,曲线上升。剪切力加载释放的输出信号曲线如图6所示。
42.本发明能够通过柱状结构变形实现磁性触觉传感器对剪切力的感知,通过测试发现传感装置对剪切力的响应具有线性响应,且具有较高灵敏度,如图7所示。
43.实施例2:
44.在实施例1的基础上,本实施例公开了:
45.一种基于磁性传感的柱状结构剪切力传感装置的制备方法,如图3所示,包括如下步骤:
46.步骤一、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合均匀,得到pdms混合物;
47.步骤二、准备模具,模具上端设有柱形孔,将pdms混合物倒入柱形孔中,然后进行真空脱泡处理;
48.步骤三、将步骤二中经过真空脱泡处理后带有试样的模具放入干燥箱中进行加热固化,加热温度为50℃,加热时间在24h;
49.步骤四、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合,然后将200目的ndfeb颗粒倒入烧杯中,继续用玻璃棒剧烈搅拌5min以上,直至搅拌成均匀的黑色混合溶液;
50.步骤五、将步骤四中配置的混合溶液均匀旋涂到步骤三中固化好的模具表面,使混合溶液与固化的试样顶端充分接触,然后,将模具放入干燥箱中进行加热固化,加热温度为80℃,加热时间为2h;
51.步骤六、加热完成后,将步骤五的结构置于磁场中磁化,使得磁性薄膜具有剩磁强度,然后进行脱模,形成pdms柔软柱状连接结构、且pdms柔软柱状连接结构顶端与一层磁性薄膜相连;
52.步骤七、最后将pdms柔软柱状连接结构另一端与磁性gmr传感器(aa002-02e)用pdms胶黏在一起,得到基于磁性传感的柱状结构剪切力传感装置。
53.所述的步骤一、四中,固化剂为为pdms交联剂(sigma-aldrich,saint louis,mo)。
54.所述的步骤一中,pdms预聚体的配置量为5g,固化剂为0.1g;所述的步骤四中,pdms预聚体的配置量为2g,固化剂为0.2g,ndfeb颗粒为15g。
55.实施例3:
56.在实施例1的基础上,本实施例公开了:
57.一种基于磁性传感的柱状结构剪切力传感装置的制备方法,如图3所示,包括如下步骤:
58.步骤一、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合均匀,得到pdms混合物;
59.步骤二、准备模具,模具上端设有柱形孔,将pdms混合物倒入柱形孔中,然后进行真空脱泡处理;
60.步骤三、将步骤二中经过真空脱泡处理后带有试样的模具放入干燥箱中进行加热固化,加热温度为90℃,加热时间在3h;
61.步骤四、使用天平分别量取pdms预聚体与固化剂,按照一定质量比倒入烧杯中混合,然后将400目的ndfeb颗粒倒入烧杯中,继续用玻璃棒剧烈搅拌5min以上,直至搅拌成均匀的黑色混合溶液;
62.步骤五、将步骤四中配置的混合溶液均匀旋涂到步骤三中固化好的模具表面,使混合溶液与固化的试样顶端充分接触,然后,将模具放入干燥箱中进行加热固化,加热温度为120℃,加热时间为3h;
63.步骤六、加热完成后,将步骤五的结构置于磁场中磁化,使得磁性薄膜具有剩磁强度,然后进行脱模,形成pdms柔软柱状连接结构、且pdms柔软柱状连接结构顶端与一层磁性薄膜相连;
64.步骤七、最后将pdms柔软柱状连接结构另一端与磁性gmr传感器(aa002-02e)用pdms胶黏在一起,得到基于磁性传感的柱状结构剪切力传感装置。
65.所述的步骤一、四中,固化剂为为pdms交联剂(sigma-aldrich,saint louis,mo)。
66.所述的步骤一中,pdms预聚体的配置量为25g,固化剂为0.8g;所述的步骤四中,pdms预聚体的配置量为10g,固化剂为1g,ndfeb颗粒为75g。
67.实施例4:
68.在实施例2、3的基础上,本实施例公开了:
69.如图4所示,还包括步骤八、检测:将步骤七中的基于磁性传感的柱状结构剪切力传感装置置于固定平台,水平拉伸顶部磁性薄膜,利用电化学工作站测量磁性传感器的电
阻变化。
70.实施例5:
71.在实施例2、3、4的基础上,本实施例公开了:
72.如图1、2所示,所述的步骤二中,模具为pc材料制成,所述的柱形孔有4个,4个柱形孔矩阵分布。
73.实施例6:
74.在以上实施例的基础上,本实施例公开了:
75.一种基于磁性传感的柱状结构剪切力传感装置的制备方法,如图3所示,包括:
76.步骤一、使用天平量取pdms(sylgard 184)10g,其中pdms预聚体与固化剂按照质量比30:1倒入烧杯中混合,用玻璃棒搅拌均匀;
77.步骤二、将pdms混合物倒在已加工孔2*2阵列的pc长方体模具中(模具尺寸为6*6*4mm,孔直径1.5mm),然后进行真空脱泡处理;
78.步骤三、将步骤二中的模具放入干燥箱中进行加热固化,加热温度为60℃,加热时间为6h;
79.步骤四、使用天平量取pdms(sylgard 184)6g,其中预聚体与固化剂按照质量比10:1混合,然后倒入烧杯中混合,然后用天平量取颗粒直径为400目的ndfeb颗粒21g,倒入烧杯中,继续用玻璃棒剧烈搅拌5min以上,直至搅拌成均匀的黑色混合溶液,使ndfeb颗粒在混合溶液中均匀分布;
80.步骤五、使用旋涂机将步骤四中配置的混合溶液均匀旋涂到步骤三的固化好的模具表面,旋涂速度为900r/min。然后放入干燥箱中进行加热固化,加热温度为80℃,加热时间为2h;
81.步骤六、加热完成后,将步骤五的结构置于1.5t的磁场中磁化,使得磁性薄膜具有剩磁强度。之后进行脱模,形成pdms柔软柱状连接结构与一层磁性薄膜相连的结构。
82.步骤七、最后将pdms柔软柱状连接结构另一端与gmr磁性传感器(aa002-02e)用pdms胶黏在一起,这就是一个完整的基于磁性传感的柱状结构剪切力传感装置。
83.实施例7:
84.本实施例与实施例6的区别仅为,步骤一中pdms预聚体与固化剂按照质量比20:1。
85.实施例8:
86.本实施例与实施例6的区别仅为,步骤一中pdms预聚体与固化剂按照质量比10:1。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
