1.本发明涉及自动灭火技术领域,更确切地说,它涉及一种红外热像水炮的定位灭火方法。
背景技术:
2.随着煤场封闭,火力发电厂主要燃料是煤炭,其分泌的甲烷等混合气体,以及封闭后分布的粉尘很难通过无动力百叶窗进行排出。煤与空气的接触还会经常发生煤堆发热和自燃现象,封闭煤场自燃发生后威胁到煤场作业人员的人身安全和设备的运行,也给安全生产带来了相当大的火灾事故隐患,造成重大损失,煤堆自燃造成煤场火灾的问题长期以来困扰着很多相关企业,煤场封闭后如何及时早期监测、预警煤堆温度,以及早期发现烟雾,现场温度异常情况,及时翻堆、精准浇水降温、控制煤堆温度、预防煤的燃烧引发事故将成为封闭式煤场管理工作的关键问题。
3.由于煤场实施全封闭后为密闭空间,堆取料机取煤、堆煤过程中,产生大量的煤尘污染。仓内粉尘主要可以分为可沉降粉尘和不可沉降粉尘两种,容易引起粉尘爆炸的主要是可沉降粉尘或者是可沉降粉尘与不可沉降粉尘交叉密集区,主要集中在煤场中上部区域,如煤场高度50米,主要集中在20—40米高度。煤尘爆炸下极限值为35g/m3,一旦形成粉尘云,遇到明火,就会引发爆炸。因此如何加强防范未然,以及杜绝出现明火等是防止仓内煤尘爆炸的关键。
4.目前国内电厂煤场主要采用传统的人工巡检模式,依赖运维人员通过目测和接触式测温等方式来检查煤堆的升温以及防止自燃等,发生自燃后只能通过煤场内部的火焰探测器进行报警。如此以来人工巡检模式工作效率低、成本高,浪费人力物力,且现场发生自燃依靠人无法可靠有效的完成精准降温和灭火,工作质量依赖运维人员工作时的身心状态。
技术实现要素:
5.本发明的目的是克服现有技术中的不足,提供了一种红外热像水炮的定位灭火方法。
6.第一方面,提供了一种红外热像水炮的定位灭火方法,包括:
7.s1、将红外热扫描成像探测器的视野范围覆盖整个探测区域,当所述探测区域存在紫外线和红外线时,通过所述红外热扫描成像探测器扫描紫外线和红外线区域并形成原始图像数据;
8.s2、对所述原始图像数据进行预处理,得到预处理结果;
9.s3、根据所述预处理结果,通过所述红外热扫描成像探测器产生一个微弱电压,并对所述微弱电压进行处理生成图像信号;
10.s4、主控板接收所述图像信号,并根据所述图像信号生成第一控制指令对电机转动进行控制,以调节可见光分析探测器进行定位,生成定位信息;所述电机包括水平调节电
机和垂直调节电机;
11.s5、所述主控板接收所述定位信息,并通过嵌入式算法触发一个控制信号至所述水平调节电机和所述垂直调节电机上,用于分别控制所述水平调节电机水平转动、所述垂直调节电机垂直转动,以调节所述红外热像水炮到适应位置停止,在定位移动过程中可见光分析探测器持续工作,不断校正定位信息,以使所述垂直调节电机和所述水平调节电机最终停下的位置对准火源的中心,所述红外热像水炮调整水炮的喷射管口对准火点位置启动喷水;
12.s6、所述可见光分析探测器持续监测火点情况,若火焰已扑灭,自动复位,并继续进行监测。
13.作为优选,s5中,所述嵌入式算法包括位置式算法和增量式算法,所述位置式算法的公式为:
14.pout(t)=kp*e(t) ki*∑e(t) kd*(e(t)-e(t-1))
15.所述增量式算法的公式为:
16.pdlt=kp*(e(t)-e(t-1)) ki*e(t) kd*(e(t)-2*e(t-1) e(t-2))
17.其中,kp为比例系数,ki为积分系数,kd为微分系数,t为时间。
18.作为优选,s2包括:
19.s201、对所述原始图像数据进行直方图统计,获得直方图数组,并计算所述直方图数组中预先设定的最低热辐射阈值为t1,计算图像量化阈值为t2,并以t2为阈值将所述原始图像数据进行二值化,得到二值化图像;
20.s202、在所述二值化图像中搜索连通区域,并求取最大连通区域的动态参数,其中,所述动态参数包括最大连通区域的中心c1、面积a1、周长p1和尖角数量sc,若面积a≤t3,则此帧二值化图像符合火焰条件,进入步骤3,否则返回步骤1,其中,t3为预先设定的面积阈值;
21.s203、设符合火焰条件的图像数量计数初值为0,若该二值化图像是第一帧符合火焰条件的图像则将符合火焰条件的图像计数加1,并记录所述二值化图像的中心c2、面积a2和周长p2;
22.s204、若符合火焰条件的图形计数值大于t4则认为出现火情,输出火警信号,否则将符合火焰条件的图像数量计数值赋为0,其中,t4均为预先设定的阈值。
23.作为优选,所述可见光分析探测器继续监测火点情况,若所述原始图像数据中没有超过阈值t3的像素,则确定火焰已扑灭,自动复位,并继续进行监测。
24.作为优选,s6中,所述自动复位的具体步骤包括:
25.s601、通过火焰扑灭的信息反馈至所述主控板,并由所述主控板将所述信息传输至主机上,通过所述主机对所述信息进行处理;
26.s602、所述主控板接收所述主机发送的关闭信息;
27.s603、根据所述关闭信息关闭所述红外热像水炮;
28.s604、通过所述垂直调节电机将所述红外热像水炮的喷射管口调节至原始角度上;
29.s605、通过所述水平调节电机将所述红外热像水炮水平旋转至原来的位置。
30.第二方面,提供了一种红外热像水炮,用于执行第一方面任一所述的红外热像水
炮的定位灭火方法,包括:管道、喷射管口、主控板、红外热扫描成像探测器、可见光分析探测器、水平调节电机、垂直调节电机、现场手控箱及主机;
31.其中,所述喷射管口设置在所述管道的末端,所述水平调节电机和垂直调节电机设置在所述管道上;所述红外热扫描成像探测器和所述可见光分析探测器与所述喷射管口相连接;所述主控板与所述红外热扫描成像探测器、所述可见光分析探测器、所述水平调节电机、所述垂直调节电机和所述主机之间通信连接;所述现场手控箱与所述红外热扫描成像探测器之间通信连接。
32.作为优选,所述水平调节电机连接在所述管道的下端,所述垂直调节电机连接于所述管道的中段,所述水平调节电机用于实现水平360
°
转动调节,所述垂直调节电机用于调节所述喷射管口的角度。
33.作为优选,所述管道上还设有压力表,用于检测所述管道内通过的水压。
34.作为优选,所述红外热扫描成像探测器的测温范围为-10℃- 300℃。
35.作为优选,所述主机包括用户管理模块、远程遥控模块、报警管理模块、设备管理模块、设备掉线检测模块及存储和查询模块;
36.所述用户管理模块用于支持用户的添加、用户密码管理及用户权限设置;
37.所述远程遥控模块用于实现对远程设备的控制,调取远红外、近红外和可视图像数据,通过遥控灭火装置远程进行火灾的破灭和降温处理;
38.所述报警管理模块用于接收主控板的报警信息;
39.所述设备管理模块用于对测温型消防联动灭火降温装置搜索、添加及删除;
40.所述设备掉线检测模块用于在设备掉线时,主动发出设备掉线报警;
41.所述存储和查询模块用于对各种报警及操作信息进行详细记录,并进行存储和数据查询。
42.本发明的有益效果是:本发明提供的红外热像水炮使用方便,操作简单,应急操作灭火功能和远红外扫描早期火灾预警功能相配合,杜绝火势不可控,能对火点进行自动定位和紧急处理,为应急救援人员赢得时间到达现场,保证了处理人员的安全,减少火灾造成的损失,在灭火完成后还能自动复位,全面实现无人化的自动巡检,具有实用性和使用的广泛性。
附图说明
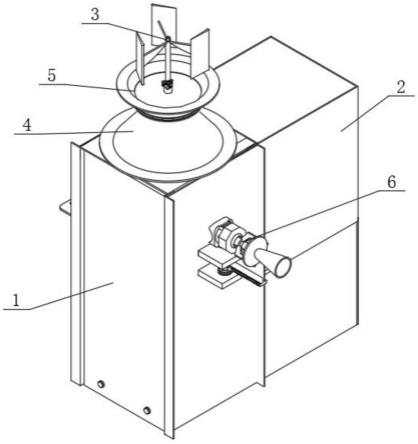
43.图1为本发明提供的红外热像水炮的结构示意图;
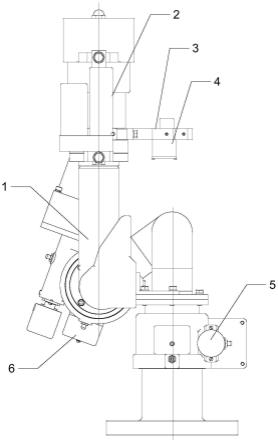
44.图2为本发明提供的红外热像水炮的剖视图;
45.附图标记说明:1、管道,2、喷射管口,3、红外热扫描成像探测器,4、可见光分析探测器,5、水平调节电机,6、垂直调节电机。
具体实施方式
46.下面结合实施例对本发明做进一步描述。下述实施例的说明只是用于帮助理解本发明。应当指出,对于本技术领域的普通人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
47.实施例1:
48.一种红外热像水炮,如图1和图2所示,包括:管道1、喷射管口2、主控板、红外热扫描成像探测器3、可见光分析探测器4、水平调节电机5、垂直调节电机6、现场手控箱及主机;
49.其中,喷射管口2设置在管道1的末端,水平调节电机5和垂直调节电机6设置在管道1上;红外热扫描成像探测器3和可见光分析探测器4与喷射管口2相连接;主控板与红外热扫描成像探测器3、可见光分析探测器4、水平调节电机5、垂直调节电机6和主机之间通信连接;现场手控箱与红外热扫描成像探测器3之间通信连接。
50.主控板用于对水平调节电机5和垂直调节电机6进行调控,红外热扫描成像探测器3用于对明火、高温、阴燃进行识别和报警,可见光分析探测器4用于进行明火、高温、阴燃区域进行追踪定位,现场手控箱用于对红外热扫描成像探测器3采集的图像进行查看及本地操作,主机用于进行报警记录、报警信息查询、远程控制及远程修改参数。
51.水平调节电机5连接在管道1的下端,垂直调节电机6连接于管道1的中段,水平调节电机5用于实现水平360
°
转动调节,垂直调节电机6用于调节喷射管口的角度。
52.本技术不对红外热像水炮的数量进行限定,多个红外热像水炮具有多个主控板,通过多个主控板进行水炮喷水控制,有效节约水资源,同时,还能实现精准灭火。
53.管道1末端的喷射管口2的一侧固定设置红外热扫描成像探测器3,红外热扫描成像探测器3一侧固定设置可见光分析探测器4,同时,红外热扫描成像探测器3和可见光分析探测器4还可以通过保护壳进行一体固定连接,方便在进行红外热扫描成像探测器3扫描明火、高温、阴燃区域时进行追踪定位,精准度高。主机具有实时存储热烟火火情报警图片的功能。当消防人员到达现场后,可根据最初的火灾热图和烟火图片,判断起火点和起火原因。即使火场烟雾弥漫,消防人员仍能通过起火的精准时间,最快火警信息、报警图片存储功能回看,准确地找到起火部位,采取有效措施扑灭火灾。
54.其中,可见光分析探测器4由黑白和彩色两路组成,形成了红外、黑白、彩色三通道火焰识别和处理算法。
55.此外,管道1上还设有压力表,用于检测管道内通过的水压。红外热扫描成像探测器3的测温范围为-10℃- 300℃。
56.管道1的中间段为u形结构,u形结构的两端分别连接喷射管口2和用于连接输出水源,或者连接消防栓等。而水平调节电机5连接在管道1的进水端上,垂直调节电机6设置在管道1的末端上,用于调节喷射管口2的角度转动,以适应精准的定位喷射,自动化调节效果好。相对于传统的消防炮系统,本产品可实现全程无人化,并对多点高温区和烟雾出现区域进行逐一降温覆盖动作,通过降温灭火介质的喷射抛物线原理和机械三维空间值原理自动计算预判角度,从而实现精准移动式打击覆盖。无需人员进行干预设备的自行巡航工作,无需人员的现场操作,弥补了现场不能及时预防的隐范,同时弥补了人操作机器存在不精准型和不稳定性以及危险性。
57.主控板采用高集成度armm3内核嵌入系统,能够实现热像、黑白和彩色图像的采集、编码、解码和水炮控制等功能。系统采用实时linux操作系统,c 语言开发,具有效率高、可靠性高的特点的。主板采用多cpu设计,集成了arm内核和dsp内核,能够实现对水炮电机的高精度控制,控制期间采用高速大容量继电器,能够实现对各种中小功率的电动机、阀门、水泵的精确调控。
58.主机包括用户管理模块、远程遥控模块、报警管理模块、设备管理模块、设备掉线
检测模块及存储和查询模块;
59.用户管理模块用于支持用户的添加、用户密码管理及用户权限设置;提供两种用户权限,管理员权限和普通用户权限。普通用户不具备设备管理和地图管理权限。
60.远程遥控模块用于实现对远程设备的控制,调取远红外、近红外和可视图像数据,通过遥控灭火装置远程进行火灾的破灭和降温处理。
61.报警管理模块用于接收主控板的报警信息。
62.设备管理模块用于对测温型消防联动灭火降温装置搜索、添加及删除。
63.设备掉线检测模块用于在设备掉线时,主动发出设备掉线报警。
64.存储和查询模块用于对各种报警及操作信息进行详细记录,并进行存储和数据查询,并进行存储不少于10000条历史数据和并提供完备的数据查询。
65.其中,主机采用工业计算机,实现对水炮远程遥控及参数设置,与水炮之间采用以太网通讯。主机采用window系统,采用微软的.net开发平台,采用c#语言开发。系统采用完全面向对象的语言开发,利用mvvm开发模式,显示页面和后台逻辑完全分类,用sqllite小型数据库,可能方便的部署。
66.实施例2:
67.一种红外热像水炮的定位灭火方法,包括:
68.s1、将红外热扫描成像探测器的视野范围覆盖整个探测区域,当探测区域存在紫外线和红外线时,通过红外热扫描成像探测器扫描紫外线和红外线区域并形成原始图像数据。
69.在s1之前,本发明需要将红外热扫描成像探测器安放于探测区域中心,使得红外热扫描成像探测器的视野范围覆盖整个探测区域。
70.s2、对原始图像数据进行预处理,得到预处理结果。
71.s2包括:
72.s201、对原始图像数据进行直方图统计,获得直方图数组,并计算直方图数组中预先设定的最低热辐射阈值为t1,计算图像量化阈值为t2,并以t2为阈值将原始图像数据进行二值化,得到二值化图像;这样图像获取方便,同时倾斜度高。
73.具体的,直方图是数值数据分布的精确图形表示,这是一个连续变量(定量变量)的概率分布的估计,它是一种条形图。为了构建直方图,第一步是将值的范围分段,即将整个值的范围分成一系列间隔,然后计算每个间隔中有多少值。
74.图像二值化(image binarization)就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。在数字图像处理中,二值图像占有非常重要的地位,图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。在数字图像处理中,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像。
75.s202、在二值化图像中搜索连通区域,并求取最大连通区域的动态参数,其中,动态参数包括最大连通区域的中心c1、面积a1、周长p1和尖角数量sc,若面积a≤t3,则此帧二值化图像符合火焰条件,进入步骤3,否则返回步骤1,其中,t3为预先设定的面积阈值。
76.s203、设符合火焰条件的图像数量计数初值为0,若该二值化图像是第一帧符合火焰条件的图像则将符合火焰条件的图像计数加1,并记录二值化图像的中心c2、面积a2和周长p2。
77.s204、若符合火焰条件的图形计数值大于t4则认为出现火情,输出火警信号,否则将符合火焰条件的图像数量计数值赋为0,其中,t4均为预先设定的阈值。
78.s3、根据预处理结果,通过红外热扫描成像探测器产生一个微弱电压,并对微弱电压进行处理生成图像信号。
79.s4、主控板接收所述图像信号,并根据所述图像信号生成第一控制指令对电机转动进行控制,以调节可见光分析探测器进行定位,生成定位信息;电机包括水平调节电机和垂直调节电机。
80.s5、主控板接收所述定位信息,并通过嵌入式算法触发一个控制信号至水平调节电机和垂直调节电机上,用于分别控制水平调节电机水平转动、垂直调节电机垂直转动,以调节红外热像水炮到适应位置停止,在定位移动过程中可见光分析探测器持续工作,不断校正定位信息,以使垂直调节电机和水平调节电机最终停下的位置对准火源的中心,红外热像水炮调整水炮的喷射管口对准火点位置启动喷水。
81.具体地,根据火焰底部中心处的图像位置初步确定火点坐标,将采集的图像信息反馈至所述主控板上,通过所述主控板控制电机进行xy轴水平垂直调节所述喷射管口以对准最高温度的中间位置,启动覆盖该火点范围的红外热像水炮,所述红外热像水炮调整水炮的喷射管口对准火点位置启动喷水。
82.s5中,嵌入式算法包括位置式算法和增量式算法,位置式算法的公式为:
83.pout(t)=kp*e(t) ki*∑e(t) kd*(e(t)-e(t-1))
84.增量式算法的公式为:
85.pdlt=kp*(e(t)-e(t-1)) ki*e(t) kd*(e(t)-2*e(t-1) e(t-2))。
86.其中,kp为比例系数,ki为积分系数,kd为微分系数,t为时间。
87.具体的,pid控制器的参数整定是控制系统设计的核心内容。pid控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。pid控制器参数的整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。
88.(1)确定比例系数kp
89.先确定比例系数kp时,首先去掉pid的积分项和微分项,可以令ti=0、td=0,使之成为纯比例调节。输入设定为系统允许输出最大值的60%~70%,比例系数kp由0开始逐渐增大,直至系统出现振荡;再反过来,从此时的比例系数kp逐渐减小,直至系统振荡消失。记录此时的比例系数kp,设定pid的比例系数kp为当前值的70%~80%。
90.(2)确定积分时间常数ti
91.比例系数kp确定之后,设定一个较大的积分时间常数ti,然后逐渐减小ti,直至系
统出现振荡,然后再反过来,逐渐增大ti,直至系统振荡消失。记录此时的ti,设定pid的积分时间常数ti为当前值的150%~180%。
92.(3)确定微分时间常数td
93.微分时间常数td一般不用设定,为0即可,此时pid调节转换为pi调节。如果需要设定,则与确定kp的方法相同,取不振荡时其值的30%。
94.通过上述的嵌入式算法控制红外热扫描成像探测器进行火点实时检测,控制稳定性好,适应广泛。
95.s6、可见光分析探测器持续监测火点情况,若火焰已扑灭,自动复位,并继续进行监测。
96.具体地,可见光分析探测器继续监测火点情况,若原始图像数据中没有超过阈值t3的像素,则确定火焰已扑灭,自动复位,并继续进行监测。
97.s6中,自动复位的具体步骤包括:
98.s601、通过火焰扑灭的信息反馈至主控板,并由主控板将信息传输至主机上,通过主机对信息进行处理;
99.s602、主控板接收主机发送的关闭信息;
100.s603、根据关闭信息关闭红外热像水炮;
101.s604、通过垂直调节电机将红外热像水炮的喷射管口调节至原始角度上;
102.s605、通过水平调节电机将红外热像水炮水平旋转至原来的位置。
103.这样可实现全程无人化,并对多点高温区和烟雾出现区域进行逐一降温覆盖动作,通过降温灭火介质的喷射抛物线原理和机械三维空间值原理自动计算预判角度,从而实现精准移动式打击覆盖。无需人员进行干预设备的自行巡航工作,无需人员的现场操作,弥补了现场不能及时预防的隐范,同时弥补了人操作机器存在不精准型和不稳定性以及危险性。真正意义上的杜绝明火事故的出现,自行覆盖降温能达到减轻现场点检人的巡检压力,减去负责人的心里压力,保证将事故控制在零的目的。防范未然,未来可运用在电厂、钢厂、化工等危险品的厂库和输运环节。
104.综上所述,通过s1至s6,本发明整体使用方便,操作简单,具备人的应急操作灭火功能和远红外扫描早期火灾预警功能相配合,杜绝火势不可控,能对火点进行自动定位和紧急处理,为应急救援人员赢得时间到达现场,保证了处理人员的安全,减少火灾造成的损失,在灭火完成后还能自动复位,全面实现无人化的自动巡检,具有实用性和使用的广泛性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。