1.本实用新型涉及消防机器人技术相关领域,特别涉及一种能够实现多向调节的改进型的灭火风炮,尤其是具有调节功能的灭火风炮机构。
背景技术:
2.随着智能化机械制造业的不断发展,消防机器人在火灾救援中也逐步得到了广泛的应用。传统的消防灭火机器人一般分为履带式结构与轮体式行走机构。不论哪种消防机器人其一般主要包括底盘、行走机构以及安装在底盘上部的灭火风炮结构,灭火风炮结构作为主要的工作部件其灵活的自由度以及快速的锁位控制能力尤为重要。
3.目前消防机器人上部的灭火风炮为了保证连接结构的稳定性一般通常采用焊死结构,这种焊死的结构虽然在使用中具有较强的稳定性,但是在实际火灾救援的过程中焊死结构导致灭火风炮的结构不可调节,无法对不同高位的火源进行快速的调位喷射,一般主要是通过调节距离火源的距离来达到喷射调节的目的,可调灵活性较差,另外,这种风炮焊死结构在这个机器人行走在较为颠簸的路面时减震效果较差,易对灭火风炮结构造成较大的振动,长期使用后影响使用寿命。
技术实现要素:
4.本实用新型为解决上述技术问题之一,所采用的技术方案是:具有调节功能的灭火风炮机构,包括一回转支承,所述回转支承用于固定安装在消防机器人底盘顶部,在所述回转支承的转动件的顶部固定安装有一安装座,在所述安装座的前端固定安装有一缓冲支撑组件,在所述缓冲支撑组件的前端可拆卸的固定安装有一灭火风炮主体,所述灭火风炮主体的前端向上倾斜设置,所述灭火风炮主体的后端底部设置有用于与外部的消防供水管相连接的波纹进水管接头,在所述缓冲支撑组件的后侧的安装座顶部设置有一调节拉结组件,所述调节拉结组件用于实现对灭火风炮主体的倾斜角度的控制,所述缓冲支撑组件用于实现对灭火风炮主体的弹性支撑。
5.在上述任一方案中优选的是,所述波纹进水管接头的倾斜角度可调节。
6.所述缓冲支撑组件包括一设置在所述安装座上方的摆动支撑臂,所述摆动支撑臂的前端向上倾斜设置,所述摆动支撑臂的后端通过铰轴活动铰接在一固定耳座的耳孔处,在所述摆动支撑臂的前端面处焊接有一法兰连接座,所述法兰连接座通过螺栓与所述灭火风炮主体的后端栓接固连,在所述摆动支撑臂的中段下方设置有一弹性缓冲件,所述弹性缓冲件的底部安装在所述安装座的顶部、顶部用于活动抵紧所述摆动支撑臂的中段。
7.在上述任一方案中优选的是,所述弹性缓冲件包括一固定安装在所述安装座的顶部的限位立筒,在所述限位立筒的空腔内设置有一缓冲弹簧,所述缓冲弹簧的底部固定在所述限位立筒的空腔底部,在所述限位立筒的空腔的上部插装有一顶升柱,所述顶升柱的底部固定在所述缓冲弹簧的顶部,所述顶升柱的顶部向上穿出所述限位立筒,在所述顶升柱的顶部上方设置有一抵紧卡扣,所述抵紧卡扣用于实现对所述摆动支撑臂的中段实现抵
接支撑。
8.在上述任一方案中优选的是,在所述抵紧卡扣与所述顶升柱之间设置一短连杆,所述短连杆的顶部与所述抵紧卡扣底部的耳板活动铰接,短连杆的底部与所述顶升柱顶部的耳板活动铰接。
9.在上述任一方案中优选的是,所述调节拉结组件包括一固定安装在所述缓冲支撑组件的后侧的安装座顶部的定位立座,在所述定位立座的前侧面上自上而下间隔固定有若干个后耳座;还包括一固定焊接安装在所述摆动支撑臂的上部外侧壁上的前耳座,在所述灭火风炮主体的上部设置一伸缩缸,所述伸缩缸的缸体的后端通过其上的焊接耳与对应位置处处的一个后耳座实现铰接,一水平设置的铰连柱的中段分别活动插装在所述焊接耳的耳孔以及对应连接的后耳座的耳孔内,在所述铰连柱的两端外侧壁上均设置有外螺纹段,在各所述外螺纹段均旋合有一锁位螺母,所述锁位螺母用于实现对对应位置处的后耳座的抵紧,所述伸缩缸的伸缩杆的前端通过短钢丝绳与对应位置处的所述前耳座实现活动连接。
10.在上述任一方案中优选的是,在各所述锁位螺母外侧的外螺纹段上分别旋合有一防脱螺母。
11.在上述任一方案中优选的是,在所述短钢丝绳上活动套接有一限位细弹簧。
12.与现有技术相比,本实用新型的有益效果如下:
13.1、整个风炮机构安装于消防机器人的底盘顶部,整个机构可以通过回转支承实现旋转角度的调节,另外通过的调节拉结组件实现灭火风炮主体的倾斜角度的调节,整体灵活性较强。
14.2、在灭火风炮主体的下方设置有缓冲支撑组件可以有效地起到支撑与缓冲的作用,保证在整个机构安装与消防机器人上跟随其运动在颠簸路面时的减振、缓冲,有效地起到防护作用,延长整个机构的使用寿命。
附图说明
15.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部件一般由类似的附图标记标识。附图中,各元件或部件并不一定按照实际的比例绘制。
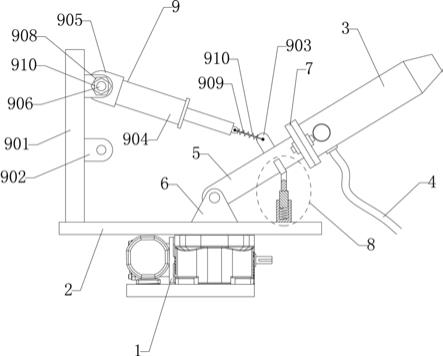
16.图1为本实用新型的实施例1的结构示意图。
17.图2为图1的局部放大结构示意图。
18.图3为本实用新型的实施例2的结构示意图。
19.图4为图3的局部放大结构示意图。
20.图5为本实用新型的焊接耳与后耳座连接结构示意图。
21.图中,1、回转支承;2、安装座;3、灭火风炮主体;4、波纹进水管接头;5、摆动支撑臂;6、固定耳座;7、法兰连接座;8、弹性缓冲件;801、限位立筒;802、缓冲弹簧;803、空腔;804、顶升柱;805、抵紧卡扣;806、短连杆;9、调节拉结组件;901、定位立座;902、后耳座;903、前耳座;904、伸缩缸;905、焊接耳;906、铰连柱;907、外螺纹段;908、锁位螺母;909、短钢丝绳;910、防脱螺母;10、限位细弹簧。
具体实施方式
22.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。本实用新型的具体结构,如图1-5中所示。
23.实施例1:
24.具有调节功能的灭火风炮机构,包括一回转支承1,所述回转支承1用于固定安装在消防机器人底盘顶部,在所述回转支承1的转动件的顶部固定安装有一安装座2,在所述安装座2的前端固定安装有一缓冲支撑组件,在所述缓冲支撑组件的前端可拆卸的固定安装有一灭火风炮主体3,所述灭火风炮主体3的前端向上倾斜设置,所述灭火风炮主体3的后端底部设置有用于与外部的消防供水管相连接的波纹进水管接头4,在所述缓冲支撑组件的后侧的安装座2顶部设置有一调节拉结组件9,所述调节拉结组件9用于实现对灭火风炮主体3的倾斜角度的控制,所述缓冲支撑组件用于实现对灭火风炮主体3的弹性支撑。
25.安装时将整个回转支承1安装在消防机器人底盘顶部后可以实现整个结构的稳定定位,缓冲支撑组件的安装可以实现对灭火风炮主体3支撑、缓冲与减振,从而保证灭火风炮主体3行走运动过程中的缓冲与稳定,避免过度的硬性撞击。
26.同时,设置的调节拉结组件9可以用于实现对当前的灭火风炮主体3的调节控制,保证在灭火过程中灭火风炮主体3向外喷射水流的角度的不同,以便于实现应对不同场景下的灭火需求,调节控制更加方便。
27.在上述任一方案中优选的是,所述波纹进水管接头4的倾斜角度可调节。
28.所述缓冲支撑组件包括一设置在所述安装座2上方的摆动支撑臂5,所述摆动支撑臂5的前端向上倾斜设置,所述摆动支撑臂5的后端通过铰轴活动铰接在一固定耳座6的耳孔处,在所述摆动支撑臂5的前端面处焊接有一法兰连接座7,所述法兰连接座7通过螺栓与所述灭火风炮主体3的后端栓接固连,在所述摆动支撑臂5的中段下方设置有一弹性缓冲件8,所述弹性缓冲件8的底部安装在所述安装座2的顶部、顶部用于活动抵紧所述摆动支撑臂5的中段。
29.缓冲支撑组件的主要作用是实现对灭火风炮主体3的连接固定、同时实现对整个灭火风炮主体3的支撑与缓冲控位、减振。
30.工作时通过弹性缓冲件8对摆动支撑臂5实现弹性支撑,由于摆动支撑臂5的后端处于铰接状态,因此其只能实现前端活动摆动,而弹性缓冲件8则对其完成支撑与缓震,起到安全支撑的作用,由于灭火风炮主体3与摆动支撑臂5的前端栓接连接,因此灭火风炮主体3也会跟随摆动支撑臂5实现同步运动。
31.在上述任一方案中优选的是,所述弹性缓冲件8包括一固定安装在所述安装座2的顶部的限位立筒801,在所述限位立筒801的空腔803内设置有一缓冲弹簧802,所述缓冲弹簧802的底部固定在所述限位立筒801的空腔803底部,在所述限位立筒801的空腔803的上部插装有一顶升柱804,所述顶升柱804的底部固定在所述缓冲弹簧802的顶部,所述顶升柱804的顶部向上穿出所述限位立筒801,在所述顶升柱804的顶部上方设置有一抵紧卡扣805,所述抵紧卡扣805用于实现对所述摆动支撑臂5的中段实现抵接支撑。
32.弹性缓冲件8在受到摆动支撑臂5及其上的重力抵压时会出现一定的弹性支撑,顶升柱804的受重力向下运动,从而实现对缓冲弹簧802的压缩,此时缓冲弹簧802可以起到减
振缓冲的作用,尤其是遇到颠簸路面时缓冲弹簧802可以有效地减少灭火风炮主体3的硬性碰撞颠簸,有效地保证对灭火风炮主体3的防护。
33.同时,设置的抵紧卡扣805可以起到对摆动支撑臂5的中段底部进行抵接支撑的作用。
34.在上述任一方案中优选的是,所述调节拉结组件9包括一固定安装在所述缓冲支撑组件的后侧的安装座2顶部的定位立座901,在所述定位立座901的前侧面上自上而下间隔固定有若干个后耳座902;还包括一固定焊接安装在所述摆动支撑臂5的上部外侧壁上的前耳座903,在所述灭火风炮主体3的上部设置一伸缩缸904,所述伸缩缸904的缸体的后端通过其上的焊接耳905与对应位置处处的一个后耳座902实现铰接,一水平设置的铰连柱906的中段分别活动插装在所述焊接耳905的耳孔以及对应连接的后耳座902的耳孔内,在所述铰连柱906的两端外侧壁上均设置有外螺纹段907,在各所述外螺纹段907均旋合有一锁位螺母908,所述锁位螺母908用于实现对对应位置处的后耳座902的抵紧,所述伸缩缸904的伸缩杆的前端通过短钢丝绳909与对应位置处的所述前耳座903实现活动连接。
35.调节拉结组件9的后端可以根据需要选择其安装在不同的后耳座902上,从而实现不同的高度定轴,保证拉结灭火风炮主体3时的稳定性与省力性。
36.铰连柱906通过锁位螺母908安装后可以实现伸缩缸904的后端与后耳座902的相对铰接,保证正常的角度旋转;同样地,伸缩缸904的前端设置成通过短钢丝绳909进行柔性连接,可以有效地实现一定角度范围内的调节,保证拉紧调节时的通用可调性。
37.另外,在此的伸缩缸904选用现有技术中本安型的防爆电缸,所述防爆电缸上安装与外部遥控器配套的遥控电气元件接收器,可以有效地保证在高温环境附近进行工作时的安全性,具体伸缩缸904的选择属于现有技术中本领域技术人员的常规选择,在此不再赘述。
38.在上述任一方案中优选的是,在各所述锁位螺母908外侧的外螺纹段907上分别旋合有一防脱螺母910。
39.增设防脱螺母910可以有效地减少振动过程中锁位螺母908脱落的风险。
40.在上述任一方案中优选的是,在所述短钢丝绳909上活动套接有一限位细弹簧10。
41.在此设置的限位细弹簧10的主要作用是在摆动支撑臂5跟随颠簸路段实现向上翘起时限位细弹簧10的两端分别与伸缩缸904的伸缩杆端部、前耳座903实现抵紧起到缓冲防撞的作用。
42.整个机构安装于消防机器人的底盘的顶部,同时将对应的各个用电部件接通消防机器人上的电源,并对电路部分进行防水处理。
43.当消防机器人启动后对火源部位进行喷射水流灭火,水流经过外部的消防水管流入灭火风炮主体3并由其前端向外喷射,根据需要控制遥控器来控制伸缩缸904实现不同程度的伸长或者伸缩,从而实现对摆动支撑臂5的倾斜角度的控制。
44.实施例2:
45.具有调节功能的灭火风炮机构,包括一回转支承1,所述回转支承1用于固定安装在消防机器人底盘顶部,在所述回转支承1的转动件的顶部固定安装有一安装座2,在所述安装座2的前端固定安装有一缓冲支撑组件,在所述缓冲支撑组件的前端可拆卸的固定安装有一灭火风炮主体3,所述灭火风炮主体3的前端向上倾斜设置,所述灭火风炮主体3的后
端底部设置有用于与外部的消防供水管相连接的波纹进水管接头4,在所述缓冲支撑组件的后侧的安装座2顶部设置有一调节拉结组件9,所述调节拉结组件9用于实现对灭火风炮主体3的倾斜角度的控制,所述缓冲支撑组件用于实现对灭火风炮主体3的弹性支撑。
46.安装时将整个回转支承1安装在消防机器人底盘顶部后可以实现整个结构的稳定定位,缓冲支撑组件的安装可以实现对灭火风炮主体3支撑、缓冲与减振,从而保证灭火风炮主体3行走运动过程中的缓冲与稳定,避免过度的硬性撞击。
47.同时,设置的调节拉结组件9可以用于实现对当前的灭火风炮主体3的调节控制,保证在灭火过程中灭火风炮主体3向外喷射水流的角度的不同,以便于实现应对不同场景下的灭火需求,调节控制更加方便。
48.在上述任一方案中优选的是,所述波纹进水管接头4的倾斜角度可调节。
49.所述缓冲支撑组件包括一设置在所述安装座2上方的摆动支撑臂5,所述摆动支撑臂5的前端向上倾斜设置,所述摆动支撑臂5的后端通过铰轴活动铰接在一固定耳座6的耳孔处,在所述摆动支撑臂5的前端面处焊接有一法兰连接座7,所述法兰连接座7通过螺栓与所述灭火风炮主体3的后端栓接固连,在所述摆动支撑臂5的中段下方设置有一弹性缓冲件8,所述弹性缓冲件8的底部安装在所述安装座2的顶部、顶部用于活动抵紧所述摆动支撑臂5的中段。
50.缓冲支撑组件的主要作用是实现对灭火风炮主体3的连接固定、同时实现对整个灭火风炮主体3的支撑与缓冲控位、减振。
51.工作时通过弹性缓冲件8对摆动支撑臂5实现弹性支撑,由于摆动支撑臂5的后端处于铰接状态,因此其只能实现前端活动摆动,而弹性缓冲件8则对其完成支撑与缓震,起到安全支撑的作用,由于灭火风炮主体3与摆动支撑臂5的前端栓接连接,因此灭火风炮主体3也会跟随摆动支撑臂5实现同步运动。
52.在上述任一方案中优选的是,所述弹性缓冲件8包括一固定安装在所述安装座2的顶部的限位立筒801,在所述限位立筒801的空腔803内设置有一缓冲弹簧802,所述缓冲弹簧802的底部固定在所述限位立筒801的空腔803底部,在所述限位立筒801的空腔803的上部插装有一顶升柱804,所述顶升柱804的底部固定在所述缓冲弹簧802的顶部,所述顶升柱804的顶部向上穿出所述限位立筒801,在所述顶升柱804的顶部上方设置有一抵紧卡扣805,所述抵紧卡扣805用于实现对所述摆动支撑臂5的中段实现抵接支撑。
53.弹性缓冲件8在受到摆动支撑臂5及其上的重力抵压时会出现一定的弹性支撑,顶升柱804的受重力向下运动,从而实现对缓冲弹簧802的压缩,此时缓冲弹簧802可以起到减振缓冲的作用,尤其是遇到颠簸路面时缓冲弹簧802可以有效地减少灭火风炮主体3的硬性碰撞颠簸,有效地保证对灭火风炮主体3的防护。
54.同时,设置的抵紧卡扣805可以起到对摆动支撑臂5的中段底部进行抵接支撑的作用。
55.在上述任一方案中优选的是,在所述抵紧卡扣805与所述顶升柱804之间设置一短连杆806,所述短连杆806的顶部与所述抵紧卡扣805底部的耳板活动铰接,短连杆806的底部与所述顶升柱804顶部的耳板活动铰接。
56.在此的抵紧卡扣805与实施例1中的单纯的抵接作用不同,通过两端铰接的短连杆806实现活动调角,可以根据摆动支撑臂5的摆动角度实现更好地抵紧配合,保证抵紧的贴
合度。
57.在上述任一方案中优选的是,所述调节拉结组件9包括一固定安装在所述缓冲支撑组件的后侧的安装座2顶部的定位立座901,在所述定位立座901的前侧面上自上而下间隔固定有若干个后耳座902;还包括一固定焊接安装在所述摆动支撑臂5的上部外侧壁上的前耳座903,在所述灭火风炮主体3的上部设置一伸缩缸904,所述伸缩缸904的缸体的后端通过其上的焊接耳905与对应位置处处的一个后耳座902实现铰接,一水平设置的铰连柱906的中段分别活动插装在所述焊接耳905的耳孔以及对应连接的后耳座902的耳孔内,在所述铰连柱906的两端外侧壁上均设置有外螺纹段907,在各所述外螺纹段907均旋合有一锁位螺母908,所述锁位螺母908用于实现对对应位置处的后耳座902的抵紧,所述伸缩缸904的伸缩杆的前端通过短钢丝绳909与对应位置处的所述前耳座903实现活动连接。
58.调节拉结组件9的后端可以根据需要选择其安装在不同的后耳座902上,从而实现不同的高度定轴,保证拉结灭火风炮主体3时的稳定性与省力性。
59.铰连柱906通过锁位螺母908安装后可以实现伸缩缸904的后端与后耳座902的相对铰接,保证正常的角度旋转;同样地,伸缩缸904的前端设置成通过短钢丝绳909进行柔性连接,可以有效地实现一定角度范围内的调节,保证拉紧调节时的通用可调性。
60.另外,在此的伸缩缸904选用现有技术中本安型的防爆电缸,所述防爆电缸上安装与外部遥控器配套的遥控电气元件接收器,可以有效地保证在高温环境附近进行工作时的安全性,具体伸缩缸904的选择属于现有技术中本领域技术人员的常规选择,在此不再赘述。
61.在上述任一方案中优选的是,在各所述锁位螺母908外侧的外螺纹段907上分别旋合有一防脱螺母910。
62.增设防脱螺母910可以有效地减少振动过程中锁位螺母908脱落的风险。
63.在上述任一方案中优选的是,在所述短钢丝绳909上活动套接有一限位细弹簧10。
64.在此设置的限位细弹簧10的主要作用是在摆动支撑臂5跟随颠簸路段实现向上翘起时限位细弹簧10的两端分别与伸缩缸904的伸缩杆端部、前耳座903实现抵紧起到缓冲防撞的作用。
65.整个机构安装于消防机器人的底盘的顶部,同时将对应的各个用电部件接通消防机器人上的电源,并对电路部分进行防水处理。
66.当消防机器人启动后对火源部位进行喷射水流灭火,水流经过外部的消防水管流入灭火风炮主体3并由其前端向外喷射,根据需要控制遥控器来控制伸缩缸904实现不同程度的伸长或者伸缩,从而实现对摆动支撑臂5的倾斜角度的控制。
67.当消防机器人进行移动并遇到颠簸的路面时,向上运动会有限位细弹簧10实现缓冲限位,向下运动会有弹性缓冲件8实现缓冲支撑,最终有效地保证整个摆动支撑臂5及其上的灭火风炮主体3减振保护。
68.整个风炮机构安装于消防机器人的底盘顶部,整个机构可以通过回转支承1实现旋转角度的调节,另外通过的调节拉结组件9实现灭火风炮主体3的倾斜角度的调节,整体灵活性较强;在灭火风炮主体3的下方设置有缓冲支撑组件可以有效地起到支撑与缓冲的作用,保证在整个机构安装与消防机器人上跟随其运动在颠簸路面时的减振、缓冲,有效地起到防护作用,延长整个机构的使用寿命。
69.以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中;对于本技术领域的技术人员来说,对本实用新型实施方式所做出的任何替代改进或变换均落在本实用新型的保护范围内。
70.本实用新型未详述之处,均为本技术领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。