1.本发明涉及仿生学技术领域,尤其涉及一动物形态仿生机器人。
背景技术:
2.动物形态仿生机器人可以模拟动物外形或者动作,可应用作机械宠物、现场探测等多种应用场景。研究发现,蜥蜴的柔性身体构造,独特的运动步态和较轻的质量等特点,使其运动轻巧灵活,不受地形约束且爬行速度快。据此研制出了模拟蜥蜴爬行的机器人,还原了蜥蜴的快速和灵活的运动特点;但是现有蜥蜴机器人仅停留于步态仿生实现,对于蜥蜴机器人的实用领域的功能并未有研究,对于大空间头部仅仅只利用了外观用作仿形,功能单调难以投入使用。
3.因此,提供一种实用性更强的动物形态仿生机器人成为了亟待解决的问题。
技术实现要素:
4.针对现有技术中的至少部分缺陷和不足,本发明实施例提供了一种动物形态仿生机器人,具有功能更丰富,实用性更强的特点。
5.本发明的一个实施例公开动物形态仿生机器人,包括:机器人主体;多条腿部,连接于所述机器人主体;每条所述腿部内设置有腿部驱动模块,用于驱动所述腿部运动;头部,连接所述机器人主体,所述头部包括:上颚,具有在第一方向上相对的第一端和第二端;所述第一端连接所述机器人主体;所述第二端位于所述第一端远离所述机器人主体的一侧;下颚,具有在所述第一方向上相对的第三端和第四端,所述第三端与所述第一端铰接;所述第四端邻近所述第二端设置;所述上颚与所述下颚之间形成第一容置腔;舌部,设置在所述第一容置腔内,所述舌部滑动连接所述上颚且可沿所述第一方向往复移动;所述舌部邻近所述第二端的一侧具有所述采集夹;第一驱动模块,设置在所述第一容置腔内且连接所述上颚,用于驱动所述舌部往复移动;第一传动组件,分别连接所述舌部和所述下颚;所述第一传动组件可随所述舌部的往复移动带动所述下颚绕所述第一端转动。
6.在一个实施例中,所述下颚上设置有邻近所述第一端的第一铰接支架,以及位于所述第三端和所述第四端之间的第二铰接支架;所述第一传动组件包括:第一连杆,铰接于所述第一铰接支架;第二连杆,一端铰接于所述舌部,相对的另一端与所述第一连杆远离所述第一铰接支架的一端铰接;第三连杆,一端铰接于所述第二铰接支架,相对的另一端铰接于所述第一连杆或所述第二连杆。
7.在一个实施例中,所述第一驱动模块包括:舌部舵机,固定在所述上颚上且位于所述舌部远离所述下颚的一侧;第一齿条,固定在所述舌部上背离所述下颚的一侧且沿所述第一方向延伸;第一齿轮,连接所述舌部舵机的输出端;所述第一齿条与所述第一齿轮啮合。
8.在一个实施例中,所述第一驱动模块还包括:第二齿条,与所述第一齿条尺寸相同且平行于所述第一齿条;所述第一齿条和所述第二齿条位于所述舌部远离所述下颚的一
侧,且分别位于所述舌部在垂直于所述第一方向的第二方向上相对的两端;第二齿轮,与所述第一齿轮尺寸相同且所述第二齿条啮合;第一转轴,连接所述第一齿轮和所述第二齿轮的轴心;第三齿轮,与所述第一齿轮同轴设置,所述第三齿轮的直径小于所述第一齿轮的直径;第四齿轮,第三齿轮啮合,所述第四齿轮的直径大于所述第三齿轮的直径;所述舌部舵机的输出端连接所述第四齿轮的轴心。
9.在一个实施例中,所述舌部还包括:第一支架,与所述上颚滑动连接;第二驱动模块,设置在所述第一支架上;剪叉机构,邻近所述第二端设置且连接所述第二驱动模块;所述剪叉机构包括第一剪杆单元,所述第一剪杆单元包括两个第一剪杆;所述采集夹包括相对设置的两个采集半夹;所述两个采集半夹各自设置在所述两个第一剪杆邻近所述第二端的一端。
10.在一个实施例中,所述第二驱动模块包括:直线推杆电机,固定在所述第一支架上;第一滑块,连接所述直线推杆电机的输出端且位于所述直线推杆电机邻近所述第二端的一侧;所述第一滑块与所述第一支架滑动连接且可沿所述第一方向往复移动;第二滑块,设置在所述第一滑块远离所述直线推杆电机的一侧,所述第二滑块与所述第一支架滑动连接,且可沿垂直于所述第一方向的第二方向往复移动;第三滑块,与所述第二滑块分别设置在所述第一支架在所述第二方向上相对的两侧;第一推杆,一端铰接所述第一滑块,相对的另一端铰接所述第二滑块;第二推杆,一端铰接所述第一滑块,相对的另一端铰接所述第三滑块;所述第二滑块和所述第三滑块各自铰接于所述两个第一剪杆远离所述第二端的一端;或者所述剪叉机构还包括位于所述第一剪杆单元远离所述第二端一侧的第二剪杆单元,所述第二剪杆单元包括两个第二剪杆,所述第二滑块和所述第三滑块各自铰接于所述两个第二剪杆远离所述第二端的一端。
11.在一个实施例中,所述第一支架上设置有第一滑槽,所述第二滑块与所述第一滑槽滑动连接;所述第一滑槽包括:第一凹槽,朝靠近所述下颚的方向凹陷;所述第一凹槽沿所述第二方向延伸;第二凹槽,设置在所述第一凹槽邻近所述第一端的一侧且朝靠近所述第一端的方向凹陷;所述第二凹槽平行于所述第一凹槽且与所述第一凹槽连通;第三凹槽,设置在所述第一凹槽邻近所述第二端的一侧,且朝靠近所述第二端的方向凹陷;所述第二凹槽平行于所述第一凹槽且与所述第一凹槽连通;所述第二滑块包括:主体,设置在所述第一凹槽中;两侧限位条,分别凸出于所述主体在第一方向上相对的两侧,且其一与所述第二凹槽滑动连接,另一与所述第三凹槽滑动连接。
12.在一个实施例中,每条所述腿部各自的所述腿部驱动模块包括:转向舵机,固定在所述机器人主体上;起升舵机盒,连接于所述转向舵机的输出端,所述起升舵机盒内设置有起升舵机;第一腿部连杆,连接于所述起升舵机的输出端;第二腿部连杆,铰接于所述起升舵机盒;每条所述腿部还包括:脚部,分别与所述第一腿部连杆和所述第二腿部连杆铰接;并与所述第一腿部连杆、所述第二腿部连杆和所述起升舵机盒形成平行四边形机构。
13.在一个实施例中,每条所述腿部还包括脚掌部,与所述脚部可拆卸连接。
14.在一个实施例中,所述机器人主体靠近所述第一端的一侧还设置有存储仓;所述动物形态仿生机器人还包括喉管,两端分别连接所述存储仓和所述第三端,并连通所述第一容置腔和存储仓。
15.本发明以上实施例具有如下有益效果:头部内通过第一传动组件舌部伸出的同时
开合,模仿蜥蜴捕食可用于采样;上颚和下颚之间的第一容置腔中可用于安装个部分电子器件,可以对内部元件进行保护,增添隐蔽性。
附图说明
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明一个实施例提供的动物形态仿生机器人的整体结构示意图。
18.图2为本发明一个实施例提供的动物形态仿生机器人一个腿部的结构示意图。
19.图3为本发明一个实施例提供的动物形态仿生机器人的头部的剖面示意图。
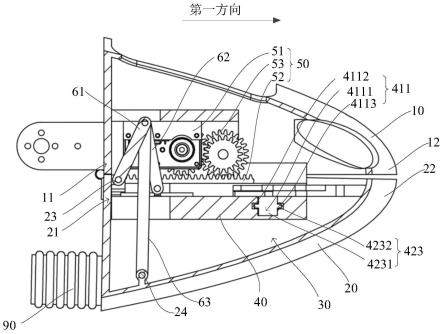
20.图4为本发明一个实施例提供的动物形态仿生机器人的头部的俯视示意图。
21.图5为本发明一个实施例提供的动物形态仿生机器人的头部的分解结构图。
22.图6为本发明一个实施例提供的动物形态仿生机器人的头部打开下颚的示意图。
23.【附图标记说明】
24.200:动物形态仿生机器人;100:头部;10:上颚;11:第一端;12:第二端;20:下颚;21:第三端;22:第四端;23:第一铰接支架;24:第二铰接支架;30:第一容置腔;40:舌部;41:第一支架;411:第一滑槽;4111:第一凹槽;4112:第二凹槽;4113:第三凹槽;42:第二驱动模块;421:直线推杆电机;422:第一滑块;423:第二滑块;424:第三滑块;425:第一推杆;426:第二推杆;4231:主体;4232:两侧限位条;43:剪叉机构;431:第一剪杆单元;4311:第一剪杆;432:第二剪杆单元4321:第二剪杆;44:采集夹;441:采集半夹;50:第一驱动模块;51:舌部舵机;52:第一齿条;53:第一齿轮;54:第二齿条;55:第二齿轮;56:第一转轴;57:第三齿轮;58:第四齿轮;60:第一传动组件;61:第一连杆;62:第二连杆;63:第三连杆;70:机器人主体;71:脊柱;72:存储仓;80:腿部;81:腿部驱动模块;811:转向舵机;812:起升舵机盒;813:起升舵机;814:第一腿部连杆;815:第二腿部连杆;801:脚部;802;脚掌部。
具体实施方式
25.以下结合附图和具体实施,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
27.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
28.下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互结合。
29.本发明一个实施例提供一种动物形态仿生机器人200,例如可以为仿生机械蜥蜴,或者其它动物形态的仿生机器人。如图1所示,动物形态仿生机器人200包括头部100、机器人主体70和多条腿部80。
30.其中,机器人主体70例如包括通过转动副铰接的多节脊柱71,便于连接拆卸。多条腿部80连接于机器人主体70。每条的腿部80内都设置有腿部驱动模块81,用于驱动腿部80运动。例如图1中所示,机器人主体70包括四节脊柱71。头部100连接机器人主体70。以连接头部100的脊柱71为第一节,从左向右依次排序,多条腿部80包括连接在第一节脊柱71两侧的两条前肢和连接在第三节脊柱71两侧的两条后肢。四肢各自设置有腿部驱动模块81,可以实现动物形态仿生机器人的爬行。
31.在一个实施例中,每条腿部80各自的腿部驱动模块81包括转向舵机811、起升舵机盒812、第一腿部连杆814和第二腿部连杆815。每条腿部80还包括脚部801和脚掌部802。其中,转向舵机811固定在机器人主体70上。起升舵机盒812连接于转向舵机811的输出端,起升舵机盒812内设置有起升舵机813。第一腿部连杆814连接于起升舵机813的输出端。第二腿部连杆815铰接于起升舵机盒812。脚部801分别与第一腿部连杆814和第二腿部连杆815铰接,并与第一腿部连杆814、第二腿部连杆815和起升舵机盒812形成平行四边形机构。
32.参照图1,在动物形态仿生机器人200上,每个腿部80的转向舵机811可以通过舵机盒各自固定在对应的脊柱71上。参照图2转向舵机811工作时可带动举升舵机盒812在靠近或远离头部100的方向摆动,而举升舵机813随举升舵机盒812的运动而运动。当举升舵机813工作时,带动第一腿部连杆814转动,以带动脚步801升起或降下,从而实现爬行的动作。通过平行四边形机构使得运动更加稳定。
33.在一个实施例中脚掌部802与脚部801可拆卸连接,根据不同的使用环境更换脚掌部802的型号。灵活性更强。
34.参照图3至图6,头部100例如包括上颚10和下颚20。上颚10具有在第一方向上相对的第一端11和第二端12。头部100例如通过第一端11连接机器人主体70,第二端12位于第一端11远离机器人主体70的一侧。下颚20具有在第一方向上相对的第三端21和第四端22。其中,第三端21与第一端11铰接,第四端22邻近第二端12设置。上颚10与下颚20之间形成第一容置腔30。第一容置腔30内设置有舌部40、第一驱动模块50和第一传动组件60。舌部40滑动连接上颚10且可沿第一方向往复移动。舌部40邻近第二端11的一侧具有采集夹44。第一驱动模块50连接上颚10,用于驱动舌部40往复移动。第一传动组件60分别连接舌部40和下颚20。可随舌部40的往复移动带动下颚20绕第一端11转动。
35.其中,上颚10的第一端11和下颚20的第三端21例如通过合页连接实现铰接。舌部40与上颚10例如通过滑轨实现滑动连接。舌部40在第一方向上的往复运动相当于蜥蜴舌头的伸缩,下颚10绕第一端11的转动使得第二端12和第四端22之间相互靠近或远离,相当于蜥蜴嘴部的张合。
36.通过本实施例提供的上述头部100的结构,可以通过驱动舌部40的伸缩同步实现上颚10和下颚20的开合,当舌部40朝远离第一端11的方向移动时,下颚20的第四端22远离上颚10的第二端12。当舌部40朝靠近第一端11的方向移动时,下颚20的第四端22靠近上颚
10的第二端12。可以模仿蜥蜴捕食的动作,在需要采样时通过伸出舌部40同时下颚20打开,由采集夹44进行采样,采样之后收回舌部40同时下颚关闭,采样夹44采集的样品可以落入下颚20。例如可以将样品存放在下颚20对应于第一容置腔30的部分。或者机器人主体70靠近第一端11的一侧还设置有存储仓72。该动物形态仿生机器人200还包括喉管90,喉管90的两端分别连接存储仓72和第三端21,连通第一容置腔30和存储仓72。可以模仿蜥蜴吞食,采集到的样品可以在落入下颚20后通过喉管90进入存储仓72。通过存储仓72对样品进行临时存储,对样品进行一定的保护作用。
37.结合上述,本实施例提供的动物形态仿生机器人兼具采集、存储和运输的功能,功能丰富,实用性强。同时第一容置腔30内还可以设置红外探测设备、摄像头等相关传感器进行感测使得这些设备不外露,通过上述头部100的结构可以对电子设备起到保护作用,并且可丰富动物形态仿生机器人200的现场勘察功能。
38.在一个实施例中,下颚20上设置有邻近第一端11的第一铰接支架23,以及位于第三端21和第四端22之间的第二铰接支架24。第一传动组件60例如为曲柄滑块机构,具体的例如包括第一连杆61、第二连杆62和第三连杆63。第一连杆61铰接于第一铰接支架23。第二连杆62的一端铰接于舌部40,相对的另一端与第一连杆61远离第一铰接支架23的一端铰接。第三连杆63的一端铰接于第二铰接支架24,相对的另一端铰接于第一连杆61或第二连杆62。具体的参照图3,第一连杆61、第二连杆62和第三连杆63三者各自的一个端部铰接在一起。当舌部40朝远离第一端11的方向运动时第一连杆61和第二连杆62施加给第三连杆63向下的力,使得下颚20转动,第四端22逐渐远离第二端12,实现下颚20的打开。当舌部40朝靠近第一端11的方向运动时,第一连杆61和第二连杆62施加给第三连杆63向上的力,使得下颚20转动,第四端22逐渐靠近第二端12,实现下颚20的闭合。参照图5所示的头部100的分解示意图,例如有两个第一传动组件60分别设置在舌部40的两侧。
39.在一个实施例中,参照图3,第一驱动模块50包括舌部舵机51和齿轮齿条组件。具体的舌部舵机51固定在上颚10上且位于舌部40远离下颚20的一侧。齿轮齿条组件包括第一齿条52和第一齿轮53。第一齿条52固定在舌部40上背离下颚20的一侧且沿第一方向延伸。第一齿轮53连接舌部舵机51的输出端。第一齿条52与第一齿轮53啮合。通过舌部舵机51驱动第一齿轮53转动,以使得第一齿条52在第一方向上往复移动,从而带动与之固定的舌部40在第一方向上往复移动。
40.更具体地,参照图5,齿轮齿条组件还包括第二齿条54和第二齿轮55。第一驱动模块51还包括第一转轴56、第三齿轮57和第四齿轮58。其中第二齿条54与第一齿条52尺寸相同且平行于第一齿条52。第一齿条52和第二齿条54位于舌部40远离下颚20的一侧,且分别位于舌部40在垂直于第一方向的第二方向上相对的两端。第二齿轮55与第一齿轮53尺寸相同且第二齿条54啮合。第一转轴56连接第一齿轮53和第二齿轮55的轴心。第三齿轮57与第一齿轮53同轴设置,第三齿轮57的直径小于第一齿轮53的直径。第四齿轮58第三齿轮57啮合,第四齿轮58的直径大于第三齿轮57的直径。舌部舵机51的输出端连接第四齿轮58的轴心。舌部舵机51工作时驱动第四齿轮58转动,通过第三齿轮57与第四齿轮58的啮合带动第三齿轮57转动,从而使第三齿轮57带动第一转轴56转动,第一转轴56带动两端的第一齿轮52和第二齿轮54同步转动,最终实现第一齿条51和第二齿条53的同步往复移动。其中前述提到的齿轮的直径为分度圆直径。
41.在一个实施例中,舌部40例如还包括第一支架41、第二驱动模块42和剪叉机构43。其中,第一支架41与上颚10滑动连接。第二驱动模块42设置在第一支架41上。剪叉机构43邻近第二端12设置且连接第二驱动模块42。剪叉机构43包括第一剪杆单元431,第一剪杆单元431包括两个第一剪杆4311。采集夹44包括相对设置的两个采集半夹441。两个采集半夹441各自设置在两个第一剪杆4311邻近第二端12的一端。其中第一支架41例如与上颚10通过滑轨滑动连接,例如在上颚10在第二方向上相对的两侧分别设置两条平行的滑轨,第一支架41设置在两条滑轨之间并与两条滑轨滑动连接。剪叉机构43的基本构造是剪杆单元,两个杆件通过一个位于中部的轴相互连接构成一组剪杆单元,多级剪杆单元首位连接可以构成剪叉机构43。例如参照图4。剪叉机构43还包括位于第一剪杆单元431远离第二端12一侧的第二剪杆单元432,第二剪杆单元432包括两个第二剪杆4321。
42.具体地,例如参照图6,第二驱动模块42例如还包括:直线推杆电机421,固定在第一支架41上。第一滑块422,连接直线推杆电机421的输出端且位于直线推杆电机421邻近第二端12的一侧。第一滑块422与第一支架41滑动连接且可沿第一方向往复移动。第二滑块423,设置在第一滑块422远离直线推杆电机421的一侧,第二滑块423与第一支架41滑动连接,且可沿垂直于第一方向的第二方向往复移动。第三滑块424,与第二滑块423分别设置在第一支架41在第二方向上相对的两侧。第一推杆425,一端铰接第一滑块422,相对的另一端铰接第二滑块423。第二推杆426,一端铰接第一滑块422,相对的另一端铰接第三滑块424。第二滑块423和第三滑块424各自铰接于两个第一剪杆4311远离第二端12的一端。或者参照图5,二滑块423和第三滑块424各自铰接于两个第二剪杆4321远离第二端12的一端。
43.直线推杆电机421可推动第一滑块422沿第一方向往复运动例如。当推动第一滑块422朝远离第二端12的方向运动时,第二滑块423和第三滑块424受第一推杆425和第二推杆426的拉力相互靠近,使得剪杆机构43伸长,且两个采集半夹441相互靠近,可以夹住样品进行采集并延长采集范围。当推动第一滑块422朝靠近第二端12的方向运动时,第二滑块423和第三滑块424受第一推杆425和第二推杆426的推动相互远离,使得剪杆机构43缩短,且两个采集半夹441相互远离,可以松开采集的样品,使样品落入下颚20,采集夹44收纳在第一容置腔30内。其中例如需要对样品进行采摘功能,可以将两个采集半夹441设置为如图5所示的锯齿形剪刀结构,或者需要对样品进行拾取功能,可以将两个采集半夹441设置成机械爪形状,本实施例并不限制。
44.更具体地,可以参照图2,第一支架41上设置有第一滑槽411,第二滑块423与第一滑槽411滑动连接。第一滑槽411包括第一凹槽4111、第二凹槽4112和第三凹槽4113。第一凹槽4111朝靠近下颚20的方向凹陷;第一凹槽4111沿第二方向延伸。第二凹槽4112,设置在第一凹槽4111邻近第一端11的一侧且朝靠近第一端11的方向凹陷。第二凹槽4112平行于第一凹槽4111且与第一凹槽4111连通。第三凹槽4113设置在第一凹槽4111邻近第二端12的一侧,且朝靠近第二端12的方向凹陷。第二凹槽4112平行于第一凹槽4111且与第一凹槽4111连通。第二滑块423包括主体4231和两侧限位条4232,主体4231设置在第一凹槽4111中。两侧限位条4232,分别凸出于主体4231在第一方向上相对的两侧,且其一与第二凹槽4112滑动连接,另一与第三凹槽4113滑动连接。参照图2所示的方位,第一凹槽4111槽口朝上(靠近上颚10方向),第二凹槽4112槽口朝右(靠近第二端12方向),第三凹槽4113槽口朝左(靠近第一端11方向)。第二滑块423的主体4231左侧的限位条与第二凹槽4112滑动连接,右侧的
限位条与第三凹槽4113滑动连接,使得第二滑块423在第二方向上滑动时能够被限位在第一滑槽411中。同理,第三滑块424的结构采用与第二滑块423相同的结构,第一支架41上还设置右用于限位第三滑块424的第二滑槽,第二滑槽的结构可与第一滑槽411的结构相同或不同。
45.综合上述实施例,本发明实施例提供的生物形态仿生机器人200兼具采集、存储、运输等多功能,并且其结构有利于保护电子设备,可适用于不同采样环境。具有美观、实用性强等诸多特点。需要说明的是,本发明上述实施例以仿生机械蜥蜴为例进行了说明,但本实施例并不限制于此,也可以是其它类型的仿生机械人。
46.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细说明,本领域普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
