1.本发明涉及医疗器械技术领域,具体涉及一种智能脊椎矫正装置的检测及矫正架。
背景技术:
2.脊椎包括颈椎、胸椎、腰椎、骶骨及尾椎五段,位于背部正中,是身体的支柱,承担着人体上半身的全部重量,也具有较高的自由度,使人体具有很高的灵活性,另外脊椎还能起到缓冲身体压力、震荡以及保护内脏的作用,脊椎对人体具有极其重要的作用。随随着生活节奏的加快,越来越多的人产生了脊椎病变,其中最常见的是由于坐姿不正导致的脊椎侧弯和前后弯曲,脊椎的非正常弯曲不仅会影响体型外貌,还会压迫周围神经,影响心肺功能和正常发育,还会导致腰背的疼痛和麻木、头痛眩晕、心率失常,严重影响患者的正常生活,因此脊椎的非正常弯曲需要进行及时矫正和治疗。
3.申请号为202010345518.4的中国发明专利公开了一种骨科医疗矫正装置的使用方法,其中立柱位于靠板的两侧,靠板上开设有一用于容纳滑杆穿过的让位槽,滑杆的两端分别可滑动地设置在两个立柱上,滑杆可沿立柱上下滑动,两个滑块位于靠板的两侧且均可滑动地设置在滑杆上,两个滑块可沿滑杆水平滑动,滑块上设置有握持部。该技术方案存在一些技术缺陷:让位槽可在滑杆上滑动并且靠板也可相对于滑杆进行翻转,这就导致在使用过程中,使用者对靠板的压力中心必须在滑杆上,操作难度过高,否则靠板会相对于滑杆滑动并向后翻转,使患者向后摔倒,造成人身伤害;四个压力触点的位置是固定的,而患者身高体型各不相同,体型较小的青少年无法同时触发四个压力触点,从而使矫正装置存在较大的受众局限性。人的脊柱是存在正常生理弯曲的,而靠板是平面结构,患者将背部长时间贴合于靠板上反而使脊柱得不到正确的矫正,甚至会出现矫枉过正的情况;使用者只能站立进行操作,驼背患者本身由于脊椎存在非正常弯曲,使腰椎支撑身体的能力降低,长时间的站立姿态会使患者在矫正过程中疲乏不堪;
4.申请号为202110817890.5的中国发明专利公开了一种医用智能脊柱矫正机,包括基座机构、座椅机构、矫正架机构、建模机构、支撑机构、点阵单元,座椅机构可以调整高度并为患者提供支撑,矫正架机构可拓印患者的背形并为患者的脊柱进行矫正治疗,建模机构可对矫正架机构进行建模,支撑机构可为患者提供纵向的前后支撑,多个点阵单元填充于矫正架机构中构成拓形和矫正单元点。该技术方案存在一些技术缺陷:座椅机构采用了基于气棒的调节机构,在调整座椅高度时,患者只能脱离座椅,使座椅处于空载状态才能调整,在调节高度时容易产生忽高忽低的情况;矫正架机构中的点阵单元仅能依靠相互连接实现整体的固定,在数量较少时这种连接方式连接较为可靠,当数量较多时这种连接方式刚性较差,中间点阵单元的位置容易产生变形,导致精度较差;建模机构只能对矫正架机构中的点阵单元进行单行依次建模,效率较低,使患者等待的时间较长;点阵单元的结构过于复杂,并且其内部采用的磁屏蔽环不能够完全屏蔽其内部的磁场,大量点阵单元高度集成的情况下容易出现磁场紊乱的情况,导致设备失灵。另外,在申请号为201720009279.9、
201621171420.7和201630557062.2的专利中公开了背部姿态矫正等相关产品,这些产品在一定程度上起到了矫正脊椎的作用,但使用者腋下普遍存在被弹性物压迫的不适感,所以很难进行长期佩戴。
技术实现要素:
5.针对上述情况,为克服现有技术之缺陷,本发明提供一种智能脊椎矫正装置的检测及矫正架,能够拓印出患者背形并将其数字化,经过数据处理系统进行建模处理后制定出相应的矫正计划,具有较高的自动化和智能化。
6.本发明的技术方案为:一种智能脊椎矫正装置的检测及矫正架,主要包括换模电机、转动架、矫正矩阵、连接板、检测矩阵、蜗轮蜗杆减速器,其中转动架前侧设有检测支架,并且检测矩阵安装于检测支架中,转动架后侧设有矫正支架,并且矫正矩阵安装于矫正支架中,连接板通过螺钉固定安装于检测支架和矫正支架上端,转动架下端通过蜗轮蜗杆减速器安装于底座后端,换模电机与蜗轮蜗杆减速器的输入轴紧固连接,从而换模电机可实现转动架的转动和定位;所述的检测矩阵包括第一矩阵板、第二矩阵板、压力毯、压板、检测探杆、弹簧、压力杆,其中第一矩阵板为长方体形状并固定安装于检测支架内部,第一矩阵板内部设有多个台阶孔,第二矩阵板上台阶孔的数量和位置与第一矩阵板上台阶孔的数量和位置一一对应,第二矩阵板安装于第一矩阵板右侧,并且两者之间紧密贴合;压力毯安装于第二矩阵板右侧,并且两者之间紧密贴合,压力毯可检测各个检测点的压力值,并将压力值数据上传至控制系统中;压板安装于压力毯右侧,并且两者之间紧密贴合,压板通过螺钉与检测支架固定连接,从而压板可为压力毯提供平整且稳定的支撑;第一矩阵板上每个台阶孔中均安装有一个检测探杆,第二矩阵板上每个台阶孔中均安装有一个压力杆,每个对应的检测探杆与压力杆之间均安装有一个弹簧,从而每个压力杆的右端的平面均与压力毯接触,从而控制系统可根据压力毯上各点的压力推算出检测探杆的移动量,进而测算出患者脊椎的弯曲程度;所述的矫正矩阵包括第三矩阵板、矫正杆、微型电机,其中第三矩阵板固定安装于矫正支架内部,第三矩阵板上方孔的数量和位置与第一矩阵板上台阶孔的数量和位置一一对应,并且每个方孔中均安装有一个矫正杆和微型电机,微型电机输出轴上的丝杆与矫正杆构成螺纹副,从而微型电机可实现对应矫正杆的移动和定位,每个微型电机均可通过一个type-c接口与控制系统的连通;矫正矩阵上可建立新的曲面模型,并根据矫正计划完成对患者背部的矫正治疗。
7.进一步地,所述的检测支架两侧标识有“a”,矫正支架两侧标识有“b”,便于快速区分。
8.进一步地,所述的换模电机内部集成有编码器,编码器可用于实时监测换模电机输出轴的转动角度,进而确定转动架的转动角度。
9.进一步地,所述的第一矩阵板的宽度不小于厘米,其高度不小于厘米,并且其内部台阶孔横向排列的数量不少于列,台阶孔竖向排列的数量不少于行。
10.进一步地,所述的第一矩阵板内每个台阶孔左端的孔径小于右端孔径,第二矩阵板内每个台阶孔左端的孔径大于右端的孔径。
11.进一步地,所述压力毯的分辨率精度可达到1.15mm
×
1.15mm。
12.进一步地,所述的检测探杆主体为圆杆结构,其左端设有半球结构,矫正杆主体为
方杆结构,其左端设有球面结构,半球结构和球面结构用于与患者背部接触,使患者具有较好的使用体验。
13.进一步地,所述的所有弹簧均经过选择和标定,使其具有相同的弹性系数。
14.本发明具有以下有益效果:1、控制系统可根据压力毯检测到的压力分布大小建立患者背部曲面数字模型,从而推算出患者脊椎弯曲数据,并制定出相应的矫正计划,具有较高的自动化和智能化。2、控制系统可使各个微型电机转动,并使对应的矫正杆移动,从而可在矫正矩阵上建立新的曲面模型,新的曲面模型与患者背部曲面不完全相同,从而可实现对患者脊椎进行循序渐进的矫正治疗。
附图说明
15.图1为本发明的整体结构示意图(支撑架打开状态)。
16.图2为本发明的整体结构示意图(支撑架闭合状态)。
17.图3为座椅和支撑架的结构示意图。
18.图4为停机脱离状态时支撑架的结构示意图。
19.图5为检测及矫正架的结构示意图(检测状态)。
20.图6为图5中ⅰ位置的局部剖面放大结构示意图。
21.图7为检测及矫正架的结构示意图(矫正状态)。
22.图8为图7中ⅱ位置的局部剖面放大结构示意图。
23.图9为检测及矫正架的爆炸示意图。
24.附图标号:1底座、2座椅、3支撑架、4检测及矫正架、5齿条、6升降柱、7左立杆、8电推杆、9左升降杆、10左旋钮、11左弯杆、11.1第一连接耳、12第一连杆、13左弯臂、14第一连接板、15第二连杆、16第二连接板、17第四连杆、18第三连接板、19右弯臂、20第五连杆、21第四连接板、22第六连杆、23支撑板、24右电缸、25第三连杆、26横圆杆、27左电缸、28右弯杆、28.1第二连接耳、29右旋钮、30右升降杆、31右立杆、32坐板、33滑台架、33.1脚踏板、34纵移电机、35齿轮、36换模电机、37转动架、37.1检测支架、37.2矫正支架、38矫正矩阵、39连接板、40检测矩阵、41蜗轮蜗杆减速器、42检测探杆、43弹簧、44第二矩阵板、45压力杆、46压力毯、47压板、48矫正杆、49微型电机、49.1丝杆、49.2type-c接口、50第一矩阵板、51第三矩阵板。
具体实施方式
25.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
26.如图1~9所示,一种智能脊椎检测及矫正装置,主要包括底座1、座椅2、支撑架3、检测及矫正架4,其中底座1后端上侧设有一个金字塔形的凸台,底座1前端为平板结构,平板结构上侧固定安装有两个平行的导轨和一个齿条5,并且齿条5位于两个导轨之间,底座1可稳定放置于地面上。
27.如图2、图3、图4所示,所述的座椅2包括升降柱6、坐板32、滑台架33、纵移电机34、齿轮35,其中滑台架33为方形的箱体结构,其前端下侧向前设有脚踏板33.1,脚踏板33.1为平板结构,并且中间位置设有筋板进行加固,脚踏板33.1用于使患者放置双脚;滑台架33下
侧设有四个滑块,该四个滑块分别与底座1上的两个导轨配合安装并构成移动副;所述的纵移电机34内部集成有编码器,编码器可用于实时监测纵移电机34输出轴的转动角度,从而可识别滑台架33所处的位置,纵移电机34固定安装于滑台架33后侧,所述的齿轮35与纵移电机34的输出轴同轴紧固连接,并且齿轮35与齿条5啮合构成齿轮齿条传动结构,从而纵移电机34可实现滑台架33的前后移动;所述的升降柱6内部设有电动升降机构,升降柱6下端固定安装于滑台架33内部;所述的坐板32固定安装于升降柱6上端,并且坐板32上侧铺设有软质海绵坐垫,使患者具有较好的乘坐体验。
28.如图3、图4所示,所述的支撑架3包括左立杆7、电推杆8、左升降杆9、左旋钮10、左弯杆11、第一连杆12、左弯臂13、第一连接板14、第二连杆15、第二连接板16、第四连杆17、第三连接板18、右弯臂19、第五连杆20、第四连接板21、第六连杆22、支撑板23、右电缸24、第三连杆25、横圆杆26、左电缸27、右弯杆28、第二连接耳28.1、右旋钮29、右升降杆30、右立杆31,其中左立杆7下端通过螺钉固定安装于滑台架33左侧,左立杆7上端为内部中空的方杆结构;所述的左升降杆9为方杆结构,其上端设有一个螺纹孔,其下端内部为中空结构,左升降杆9安装于左立杆7上端并构成移动副,所述的电推杆8内部集成有编码器和刹车,编码器可实时监测电推杆8的伸长量,刹车可实现电推杆8的稳定锁止,电推杆8安装于左立杆7和左升降杆9之间的中空结构中,从而该电推杆8可实现左升降杆9的升高和定位;所述的右立杆31下端通过螺钉固定安装于滑台架33右侧,右立杆31上端为内部中空的方杆结构;所述的右升降杆30为方杆结构,其上端设有一个螺纹孔,其下端内部为中空结构,右升降杆30安装于右立杆31上端并构成移动副,右立杆31和右升降杆30之间的中空结构中也安装有一个电推杆8,该电推杆8可实现右升降杆30升高和定位;并且左右两个电推杆8会同时伸长或缩短,以使左升降杆9和右升降杆30可同时升高和降低,并始终保持相同的高度。
29.所述的左弯杆11下端设有一个横向圆孔,靠近左弯杆11下端的位置向后设置有第一连接耳11.1,左弯杆11下端与左升降杆9上端转动连接,所述的左旋钮10右端为螺纹杆结构,其左端为便于手动旋转的手轮结构,左旋钮10的右端与左升降杆9上端的螺纹孔配合安装,并且左旋钮10的右端插入左弯杆11下端的横向圆孔中,从而锁定左弯杆11的转动,使左弯杆11保持竖直状态;所述的右弯杆28下端设有一个横向圆孔,靠近右弯杆28下端的位置向后设置有第二连接耳28.1,右弯杆28下端与右升降杆30上端转动连接,所述的右旋钮29左端为螺纹杆结构,其右端为便于手动旋转的手轮结构,右旋钮29的左端与右升降杆30上端的螺纹孔配合安装,并且右旋钮29的左端插入右弯杆28下端的横向圆孔中,从而锁定右弯杆28的转动,使右弯杆28保持竖直状态;所述的横圆杆26安装于左弯杆11和右弯杆28上端之间,使左弯杆11和右弯杆28紧固连接为一个运动整体。
30.所述的左弯臂13上端与横圆杆26的左端转动连接,左弯臂13的下端与支撑板23的左端转动连接,所述的第一连接板14大致为三角形结构,其下端安装于左弯臂13靠近上端的位置并构成转动副,第一连杆12为弯杆结构,第一连杆12的后端与左弯杆11上端转动连接,第一连杆12的前端与第一连接板14的后端转动连接,从而左弯杆11、第一连杆12、左弯臂13、第一连接板14构成四连杆结构;所述的第二连接板16大致为三角形结构,其后端安装于左弯臂13靠近下端的位置并构成转动副,第二连杆15为弯杆结构,第二连杆15的后端与第一连接板14前端转动连接,第二连杆15的前端与第二连接板16上端转动连接,从而左弯臂13、第一连接板14、第二连杆15、第二连接板16构成四连杆结构;所述的第三连杆25为弯
杆结构,第三连杆25的后端与第二连接板16下端转动连接,第三连杆25的前端与支撑板23的左端转动连接,从而左弯臂13、第二连接板16、支撑板23、第三连杆25构成四连杆结构;所述左电缸27的下端与第一连接耳11.1构成球面副,左电缸27的上端与左弯臂13靠近上端的位置构成球面副。
31.所述的右弯臂19上端与横圆杆26的右端转动连接,右弯臂19的下端与支撑板23的右端转动连接,所述的第三连接板18与第一连接板14的结构相同,第三连接板18的下端安装于右弯臂19靠近上端的位置并构成转动副,第四连杆17与第一连杆12的结构相同,第四连杆17的后端与右弯杆28上端转动连接,第四连杆17的前端与第三连接板18的后端转动连接,从而第四连杆17、第三连接板18、右弯臂19、右弯杆28构成四连杆结构;所述的第四连接板21与第二连接板16的结构相同,第四连接板21的后端安装于右弯臂19靠近下端的位置并构成转动副,第五连杆20与第二连杆15的结构相同,第五连杆20的后端与第三连接板18前端转动连接,第五连杆20的前端与第四连接板21上端转动连接,从而第三连接板18、右弯臂19、第五连杆20、第四连接板21构成四连杆结构;所述的第六连杆22与第三连杆25的结构相同,第六连杆22的后端与第四连接板21的后端与第四连接板21下端转动连接,第六连杆22的前端与支撑板23的右端转动连接,从而右弯臂19、第四连接板21、第六连杆22、支撑板23构成四连杆结构;所述右电缸24与左电缸27的结构相同,右电缸24的下端与第二连接耳28.1构成球面副,右电缸24的上端与右弯臂19靠近上端的位置构成球面副。
32.所述的支撑板23内侧设有竖向的弧形凹槽,当支撑板23为患者胸腹部提供支撑时,弧形凹槽可使患者实现横向对中,也能使患者具有较好的使用体验,支撑板23上端设有向下的弧形缺口,弧形缺口可避免压迫患者的下巴和颈部,增强患者的舒适度。
33.当左电缸27和右电缸24同时伸长时,左弯臂13和右弯臂19同时向上摆动,此时在六个连杆和四个连接板的推拉作用下,支撑板23向上移动的同时也会向上翻转,从而打开支撑架3,方便患者进出设备;当左电缸27和右电缸24同时收缩时,左弯臂13和右弯臂19同时向下摆动,此时在六个连杆和四个连接板的推拉作用下,支撑板23向下移动的同时也会向下翻转,从而关闭支撑架3,使支撑板23变换为竖直状态并为患者的胸腹部提供纵向支撑。
34.当患者在治疗过程中,由于断电或故障等原因导致设备停止运行时,工作人员可向前拉动左升降杆9或右升降杆30,使座椅2带动患者和支撑架3向前移动,之后旋转并卸下左旋钮10和右旋钮29,再将左弯杆11和右弯杆28向后翻转,直至支撑板23转动至患者头部后上方,此时患者胸腹部前侧处于完全开放的状态,方便患者向前离开座椅2,使患者脱离设备。
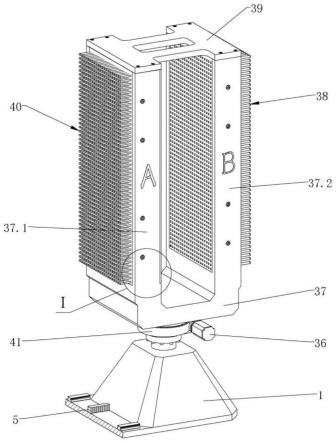
35.如图5所示,所述的检测及矫正架4包括换模电机36、转动架37、矫正矩阵38、连接板39、检测矩阵40、蜗轮蜗杆减速器41,其中转动架37前侧设有检测支架37.1,检测支架37.1两侧标识有“a”,并且检测矩阵40安装于检测支架37.1中,转动架37后侧设有矫正支架37.2,矫正支架37.2两侧标识有“b”,并且矫正矩阵38安装于矫正支架37.2中,连接板39通过螺钉固定安装于检测支架37.1和矫正支架37.2上端,使转动架37的整体刚度和强度得到增强;所述的蜗轮蜗杆减速器41通过螺钉固定安装于底座1后端金字塔形凸台的上端,转动架37的下端与蜗轮蜗杆减速器41上端的输出轴紧固连接;所述的换模电机36内部集成有编码器,编码器可用于实时监测换模电机36输出轴的转动角度,换模电机36与蜗轮蜗杆减速
器41的输入轴紧固连接,从而换模电机36可实现转动架37的转动和定位。
36.如图5、图6、图9所示,所述的检测矩阵40包括第一矩阵板50、第二矩阵板44、压力毯46、压板47、检测探杆42、弹簧43、压力杆45,其中第一矩阵板50为长方体形状,其宽度与检测支架37.1和连接板39所围成的长方形空间的宽度相等并且不小于55厘米,其高度与检测支架37.1和连接板39所围成的长方形空间的高度相等并且不小于80厘米,第一矩阵板50安装于检测支架37.1和连接板39所围成的长方形空间中并通过螺钉实现与检测支架37.1的固定连接,第一矩阵板50内部设有多个台阶孔,每个台阶孔左端的孔径小于右端孔径,并且台阶孔横向排列的数量不少于80列,台阶孔竖向排列的数量不少于115行;所述第二矩阵板44的宽度和高度与第一矩阵板50的宽度和高度对应相等,第二矩阵板44上设有多个台阶孔,并且第二矩阵板44上台阶孔的数量和位置与第一矩阵板50上台阶孔的数量和位置一一对应,第二矩阵板44上每个台阶孔左端的孔径大于右端的孔径,第二矩阵板44安装于第一矩阵板50右侧,并且两者之间紧密贴合;所述的压力毯46的宽度和高度与第二矩阵板44的宽度和高度对应相等,压力毯46安装于第二矩阵板44右侧,并且两者之间紧密贴合,压力毯46可采用xsensor品牌的压力毯,其分辨率精度可达到1.15mm
×
1.15mm,压力毯46可检测各个检测点的压力值,并将压力值数据上传至控制系统中;所述的压板47安装于压力毯46右侧,并且两者之间紧密贴合,压板47通过螺钉与检测支架37.1固定连接,从而压板47可为压力毯46提供平整且稳定的支撑。
37.如图6所示,所述的检测探杆42主体为圆杆结构,其左端设有半球结构,半球结构用于与患者背部接触,使患者具有较好的使用体验,检测探杆42右端的直径大于主体部分的直径,第一矩阵板50上每个台阶孔中均安装有一个检测探杆42,并且每个检测探杆42左端的半球结构均处于第一矩阵板50外部左侧;所述的压力杆45主体为圆杆结构,其左端直径大于右端直径,第二矩阵板44上每个台阶孔中均安装有一个压力杆45,并且每个压力杆45右端的平面均与压力毯46接触,每个对应的检测探杆42与压力杆45之间均安装有一个弹簧43,所有弹簧43均经过选择和标定,使其具有相同的弹性系数;从而检测矩阵40接触到患者背部后,各个检测探杆42受压向右移动并压缩对应的弹簧43,而对应的压力杆45将弹簧43的弹力传递至压力毯46上,压力毯46可检测到各个压力杆45的压力值,并将数据上传至控制系统,控制系统可根据各个弹簧43的弹性系数换算出对应检测探杆42的移动量,从而可得到患者背部表面的数理模型,从而测算出患者脊椎的弯曲程度。
38.如图7、图8、图9所示,所述的矫正矩阵38包括第三矩阵板51、矫正杆48、微型电机49,其中第三矩阵板51的宽度和高度与第一矩阵板50的宽度和高度对应相等,第三矩阵板51安装于矫正支架37.2和连接板39所围成的长方形空间中并通过螺钉实现与矫正支架37.2的固定连接,第三矩阵板51上设有多个方孔,并且方孔的数量和位置与第一矩阵板50上台阶孔的数量和位置一一对应。
39.如图8所示,所述矫正杆48主体为方杆结构,其左端设有球面结构,球面结构用于与患者背部接触,使患者具有较好的使用体验,矫正杆48的右端中心位置设有内螺纹结构;第三矩阵板51上每个方孔的左端均安装有一个矫正杆48,并且每个矫正杆48左端的球面结构均处于第三矩阵板51外部左侧;所述微型电机49左端的输出轴上设有丝杆49.1,微型电机49内部集成有编码器,编码器可用于实时监测丝杆49.1的转动角度,微型电机49后端设有一个type-c接口49.2,type-c接口49.2可通过数据线实现与控制系统的连通;第三矩阵
板51上每个方孔的右端均安装有一个微型电机49,并且每个微型电机49上的丝杆49.1均与对应矫正杆48右端的内螺纹结构配合安装并构成螺纹副,从而微型电机49可实现对应矫正杆48的移动和定位。
40.本发明的工作原理:
41.1)纵移电机34驱动座椅2向前移动,之后左电缸27和右电缸24伸长,使支撑板23向上翻转并打开,之后患者赤裸上身坐于坐板32上并将双脚放置于脚踏板33.1上,之后通过升降柱6调整坐板32的高度,使大腿下侧处于水平状态并与坐板32接触,之后患者采取立腰挺胸的标准坐姿;左电缸27和右电缸24收缩,使支撑板23向下翻转并贴合于患者胸腹前侧,两个电推杆8升降,使支撑板23根据患者体型调整至合适高度;
42.2)换模电机36转动,使检测支架37.1转动至正前方,此时检测矩阵40正对患者背部,之后纵移电机34转动,使座椅2带动患者和支撑架3向后移动直至患者背部接触检测矩阵40并压缩相应的检测探杆42,压力毯46检测到各个压力杆45的压力,并将数据传送至控制系统,控制系统便可建立患者背部曲面数据模型,从而推算出患者脊椎弯曲数据,并制定出相应的矫正计划;
43.3)纵移电机34转动,使座椅2带动患者和支撑架3向前移动并脱离与检测矩阵40的接触,之后换模电机36转动,使矫正支架37.2转动至正前方,此时矫正矩阵38正对患者背部,之后控制系统使各个微型电机49转动,并使对应的矫正杆48移动,从而可在矫正矩阵38上建立新的曲面模型,新的曲面模型与患者背部曲面不完全相同;
44.4)纵移电机34转动,使座椅2带动患者和支撑架3向后移动直至患者背部接触矫正矩阵38,并使患者背部与矫正矩阵38之间保持合适的压力,直至完成矫正计划。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。