技术特征:
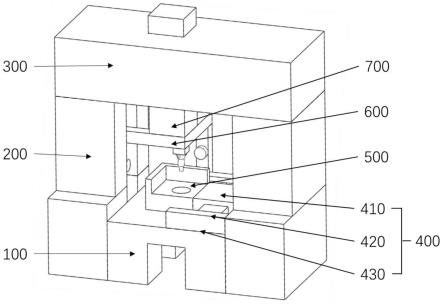
1.一种基于框架式激光测量基准的大行程高精度形位误差测量仪,其特征在于:包括主机座(100),在所述主机座(100)的左右两侧设置有立向支撑柱(200),两根所述立向支撑柱(200)的顶部设置有轴座(300);所述左侧立向支撑柱(200)开设有安装空间,可容纳探针组件(600);所述主机座(100)开设有通孔;所述主机座(100)上侧且位于两根立向支撑柱(200)之间设置有横向纵向移动机构(400),反射镜模块(500)固连于横向纵向移动机构(400)中纵向运动块(410)左侧端部;纵向运动块(410)可纵向往复运动的套装于纵向导轨(420)上,所述纵向导轨(420)可横向往复运动的安装于横向导轨(430)内;所述轴座(300)上沿竖直方向滑动设置有立轴(710);所述轴座(300)上设置有控制所述立轴(710)沿竖直方向移动的立轴纳米电机(720);所述立轴(710)竖直两侧,靠近探针组件(600)的一端分别开设固定槽(770),所述缓冲气缸(730)由气缸固定块(740)固定安装于所述立向连接孔(750)内壁,且缓冲气缸(730)的伸缩端连接所述固定槽(770)内壁;所述立轴(710)下端面设置有探针组件(600);所述反射镜模块(500)由一整块微晶玻璃制成,反射镜模块(500)左侧面设置为横向激光反射镜(520),后侧面设置为纵向激光反射镜(530),底面设置为立向激光反射镜(510),回转轴(550)配装于反射镜模块(500)内侧,回转轴端面(550)与样品固配面(540)在同一平面;所述立向激光反射镜(510)、横向激光反射镜(520)、纵向激光反射镜(530)相互垂直;所述探针组件(600)由立向激光干涉仪(610)、横向激光干涉仪(620)、纵向激光干涉仪(630)、探针(640)及吊挂架(650)组成,所述探针(640)安装于吊挂架(600)上,在吊挂架(650)上固装立向激光干涉仪(610)、横向激光干涉仪(620)和纵向激光干涉仪(630);立向激光干涉仪(610)、横向激光干涉仪(620)和纵向激光干涉仪(630)产生测距光线正交汇聚于探针(640)测头处;立向激光干涉仪(610)、横向激光干涉仪(620)、纵向激光干涉仪(630)产生光线分别与立向激光反射镜(510)、横向激光反射镜(520)、纵向激光反射镜(530)垂直;所述轴座(300)沿竖直方向开设有贯穿的立向连接孔(750),所述立向连接孔(750)内壁开设有安装槽(760);立轴纳米电机(720)安装于所述安装槽(760)内,所述立轴纳米电机(710)输出轴沿直线移动,且可带动所述立轴(600)沿竖直方向滑动。2.根据权利要求1所述的基于框架式激光测量基准的大行程高精度形位误差测量仪,其特征在于:所述探针(640)可与在所述样品固配面(540)上放置的样品进行抵接测量。3.根据权利要求1所述的基于框架式激光测量基准的大行程高精度形位误差测量仪,其特征在于:所述立向激光干涉仪(610)、横向激光干涉仪(620)、纵向激光干涉仪(630)发射出的激光光线包含多束激光光束。4.根据权利要求1所述的基于框架式激光测量基准的大行程高精度形位误差测量仪,其特征在于:所述横向纵向移动机构(400)控制所述反射镜模块(500)在横向和纵向移动,所述立轴纳米电机(720)控制所述立轴(710)在竖直方向移动探针(640);所述纵向激光干涉仪(630)获取纵向轴位移为x
″
,获取偏航角为r
y
,获取俯仰角为r
z
;所述横向激光干涉仪(620)获取横向轴位移为y
″
,获取旋转角r
x
;通过立向激光干涉仪(610)获取立向轴位移为z
″
;
根据补充公式计算被测样件补偿后的横向轴位移x
′
、纵向轴位移y
′
、立向轴位移z
′
;所述补充公式为:5.根据权利要求1所述的基于框架式激光测量基准的大行程高精度形位误差测量仪,其特征在于:所述横向纵向移动机构(400)控制所述反射镜模块(500)在横向和纵向移动,所述立轴纳米电机(720)控制所述立轴(710)在竖直方向移动探针(640),得到第i次待检测位置点的坐标(a
i
,b
i
,c
i
),i=1,...,n;回转轴(550)带动待测样件转动角度转动角度后,所述横向纵向移动机构(400)控制所述反射镜模块(500)在横向和纵向移动,所述立轴纳米电机(720)控制所述立轴(710)在竖直方向移动探针(640),在仪器坐标系下获取第j次待检测位置点的坐标(a2
j
,b2
j
,c2
j
),j=n 1,...,n k,其中,n、k为整数;将表面坐标(a2
j
,b2
j
,c2
j
)通过转换公式转换为所述待测件坐标系中,得到坐标(a
j
,b
j
,c
j
);其中,转换公式为:若干待检测位置点坐标(a
j
,b
j
,c
j
)和若干待检测位置点坐标值(a
i
,b
i
,c
i
)结合,获取一组待测件表面坐标集(a
i
,b
i
,c
i
),i=1,...,n k。
技术总结
本发明涉及一种基于框架式激光测量基准的大行程高精度形位误差测量仪,属于精密测量设备技术领域,包括主机座和立向支撑柱,两根立向支撑柱的顶部设置有轴座;主机座上侧设置有样品固配座,主机座上设置有移动机构;样品固配座上端面设置有横向激光反射镜、纵向激光反射镜和立向激光反射镜;立轴下端面安装有吊挂架,吊挂架下端设置有横向激光干涉仪、纵向激光干涉仪和立向激光干涉仪。通过采用上述方案,能够适应和满足对形状复杂零件尺寸及形位误差的微纳米级精密测量使用。误差的微纳米级精密测量使用。误差的微纳米级精密测量使用。
技术研发人员:崔俊宁 赵东方 边星元 谭久彬
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.08.20
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。