1.本发明涉及3d深度传感领域,具体涉及一种直接飞行时间(dtof,direct time of flight)传感器的感测控制设备及其方法。
背景技术:
2.飞行时间(time of flight,tof)成像技术在多个应用场景有广泛应用,例如激光探测及测距(light
‑
detection
‑
and
‑
ranging,lidar)系统,3d成像,深度映射和基于单光子雪崩二极管(single
‑
photon avalanche diode,spad)的传感设备。tof成像技术的原理是用光脉冲照射物体并检测从物体反射的一些脉冲。检测器和物体之间的距离可以通过计算出射脉冲的发射时间与从物体上的相应点所反射的辐射的到达时间之间的差来测量飞行时间从而直接测量距离,也称为dtof(direct tof,dtof)。
3.直接飞行时间(dtof)传感器是一种主动光传感器,至少包含发射装置和接收装置两个主要部分。发射装置发射激光,照射到被测物体,部分激光反射后被接收装置接收。由于发射装置与接收装置存在同步信号,控制器可以记录激光在空中来回飞行的时间t,已知光速c,可以得到物体的距离d=1/2
·
c
·
t。
技术实现要素:
4.解决的技术问题
5.被测物反射回来的光信号的强度范围非常大,主要受到探测距离、物体表面的材质、反射率以及环境光强弱等影响。然而接收装置的动态范围有限,经常会出现:近距离高反射物体的信号较强,接收装置信号会出现饱和或者堆积效应,无法测距或者测距误差变大;远距离低反射物体信号较弱,信噪比低,在信号直方图中寻峰困难,测距精度降低。
6.技术方案
7.本发明的目的是克服现有技术的不足,提供一种自动控制直接飞行时间3d传感系统信号强度的设备。
8.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,包括:控制器,所述控制器与发射装置以及接收装置耦接,并且所述控制器被配置为根据信号直方图调整发射装置的发光强度、接收装置的感光度以及测量结果的信噪比中的至少一个;发射装置,所述发射装置与控制器耦接并且被配置为发射光;接收装置,所述接收装置与控制器耦接并且被配置为接收由被测物体反射的光并且生成信号直方图。
9.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述接收装置包括spad传感器。
10.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述接收装置的感光度通过所述spad传感器的偏置电压来调整。
11.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述控制器还被配置为检查信号直方图形态及峰值,并且根据信号直方图的饱和程度
来调整发射装置的spad传感器的偏置电压,如果信号直方图的峰值超过了第一阈值,则在下一帧中主动降低偏置电压;如果信号直方图的峰值处于预设范围之内,则保持偏置电压;如果信号直方图的峰值小于了第二阈值,则增加下一帧的偏置电压。
12.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述发射装置包括激光器,并且所述激光器被配置为发射短脉冲激光。
13.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述发射装置的发光强度通过控制所述激光器的驱动电流来调整。
14.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述控制器还被配置为检查信号直方图形态及峰值,并且根据信号直方图的饱和程度来调整所述发射装置的激光器的驱动电流,如果信号直方图的峰值超过了第一阈值,则在下一帧中主动降低驱动电流;如果信号直方图的峰值处于预设范围之内,则保持驱动电流;如果信号直方图的峰值小于了第二阈值,则增加下一帧的驱动电流。
15.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述控制器被配置为检查信号直方图形态及峰值,并且根据信号直方图的饱和程度来自动增加/减少测距次数以调整测量结果的信噪比,如果信号直方图的峰值超过了第一阈值,则在下一帧中主动减少单帧的光重复测试;如果信号直方图的峰值处于预设范围之内,则保持光重复测试;如果信号直方图的峰值小于了第二阈值,则增加下一帧的光重复测试,并且增加的光重复次数不超过第三最大阈值。
16.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述控制器被配置为其增加的光重复次数所不超过的第三最大阈值是10000次。
17.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备,其特征在于,所述控制器被配置为,其检查的信号直方图的所述第一阈值是接收装置可接收的最大值的90%、所述第二阈值是接收装置可接收的最大值的30%、所述预设范围是接收装置可接收的最大值的30%~90%。
18.本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的方法,其特征在于,包括:使用控制器根据信号直方图调整发射装置的发光强度、接收装置的感光度以及测量结果的信噪比中的至少一个;使用发射装置发射光;使用接收装置接收由被测物体反射的光并且生成信号直方图。
19.有益效果
20.与现有技术相比,本发明提供了一种自动控制直接飞行时间3d传感系统信号强度的设备。具备以下有益效果:能够自动调节接收的信号强度,使得最终接收的信号强度在接收装置的接收范围内(例如,最大值的30%~90%之间),避免近距离信号饱和和畸变,提升测距精度。
附图说明
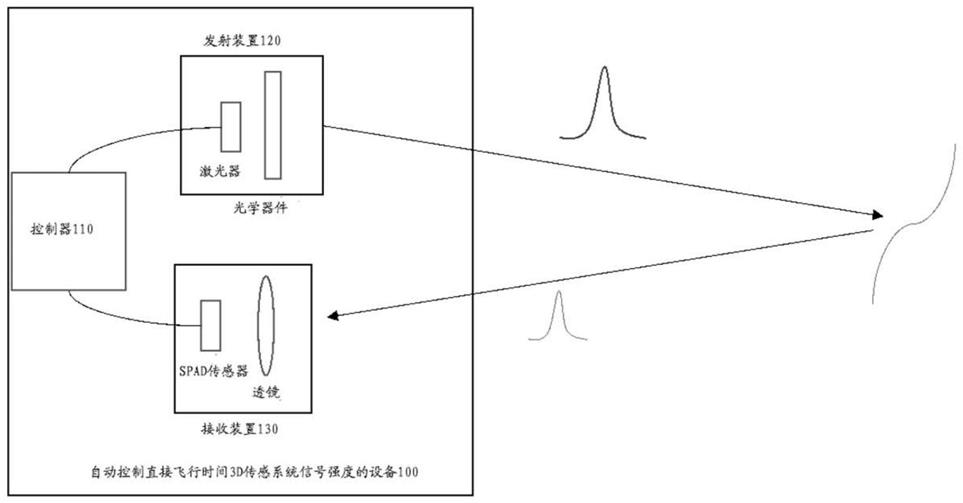
21.图1是根据本公开的实施例的自动控制直接飞行时间3d传感系统信号强度的设备的示意图。
22.图2是根据公开的实施例的spad传感器的示意图。
23.图3是根据公开的实施例的激光来回的时间延迟的示意图。
24.图4是根据公开的实施例的信号直方图。
25.图5是根据公开的实施例的spad感光单元的光子探测率(photon detection probability,pdp)与偏置电压(vexc)的关系示图。
26.图6是根据公开的实施例的垂直腔面发射激光器(vcsel)的激驱动电流和光功率的关系示图。
27.图7是根据公开的实施例的控制器110调节单帧测距中短脉冲激光的脉冲个数的示图。
具体实施方式
28.在进行下面的详细描述之前,阐述贯穿本专利文件使用的某些单词和短语的定义可能是有利的。术语“耦接”“连接”及其派生词指两个或多个元件之间的任何直接或间接通信或者连接,而无论那些元件是否彼此物理接触。术语“传输”、“接收”和“通信”及其派生词涵盖直接和间接通信。术语“包括”和“包含”及其派生词是指包括但不限于。术语“或”是包含性的,意思是和/或。短语“与
……
相关联”及其派生词是指包括、包括在
……
内、互连、包含、包含在
……
内、连接或与
……
连接、耦接或与
……
耦接、与
……
通信、配合、交织、并列、接近、绑定或与
……
绑定、具有、具有属性、具有关系或与
……
有关系等。术语“控制器”是指控制至少一个操作的任何设备、系统或其一部分。这种控制器可以用硬件、或者硬件和软件和/或固件的组合来实施。与任何特定控制器相关联的功能可以是集中式的或分布式的,无论是本地的还是远程的。短语“至少一个”,当与项目列表一起使用时,意指可以使用所列项目中的一个或多个的不同组合,并且可能只需要列表中的一个项目。例如,“a、b、c中的至少一个”包括以下组合中的任意一个:a、b、c、a和b、a和c、b和c、a和b和c。
29.贯穿本专利文件提供了其他特定单词和短语的定义。本领域普通技术人员应该理解,在许多情况下,即使不是大多数情况下,这种定义也适用于这样定义的单词和短语的先前和将来使用。
30.在本专利文件中,模块的应用组合以及子模块的划分层级仅用于说明,在不脱离本公开的范围内,模块的应用组合以及子模块的划分层级可以具有不同的方式。
31.图1是根据本公开的实施例的自动控制直接飞行时间3d传感系统信号强度的设备的示意图。
32.如图1所示,根据本公开的实施例的一种自动控制直接飞行时间3d传感系统信号强度的设备100可以是一种基于spad的dtof测距设备。该基于spad的dtof测距设备包括控制器110、发射装置120以及接收装置130。
33.控制器110与发射装置120以及接收装置130耦接。控制器110可以包括控制电路。控制器110可以被配置为控制重复测距(控制发射装置120多次发射和控制接收装置130多次接收激光)以提升信噪比、记录激光在空中来回飞行的时间t。
34.发射装置120与控制器110耦接。发射装置120可以是包括诸如vcsel121的激光器的光学器件。vcsel 121位于发射装置120的内部。发射装置120可以被配置为发射激光(诸如短脉冲激光)。
35.接收装置130可以包括spad传感器131和透镜132。spad传感器131位于接收装置130内部。透镜132位于spad传感器131前端,以用于接收反射光。接收装置130可以被配置为
接收由被测物体反射的激光(诸如短脉冲激光)。
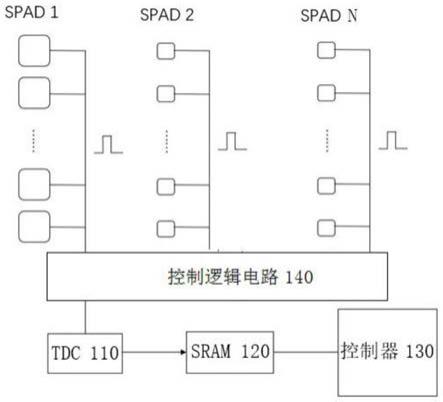
36.图2是根据公开的实施例的spad传感器的示意图。
37.如图2所示的spad传感器131包括在其上横向和纵向布置的一个或多个spad感光单元。
38.图3是根据公开的实施例的激光来回的时间延迟的示意图。
39.图4是根据公开的实施例的信号直方图。
40.使用时,发射装置120发射短脉冲激光照射被测物体,部分短脉冲激光反射后被接收装置130接收。由于发射装置120与接收装置130之间存在同步信号,控制器110可以记录短脉冲激光在空中来回飞行的时间t,即图3中所示的激光来回的时间延迟t1
‑
t0。已知光速c,可以计算得到物体的距离d=1/2
·
c
·
t。取决于探测距离、物体表面的材质、反射率以及环境光强弱等因素,反射回来的光信号的强度范围非常大。然而接收装置130的动态范围有限。当被测物体距离近且反射率高时,接收装置130所接收的信号会出现如图4中(a)所示的饱和或者堆积效应,无法测距或者测距误差变大。当被测物体距离远且反射率低时,接收装置130所接收的信号较弱,信噪比低,在信号直方图中寻峰困难,测距精度降低。当被测物体距离或反射率适中时,信号直方图如图4中的(b)所示,信号强度适中。
41.图5是根据公开的实施例的spad感光单元的pdp与偏置电压的关系示图。
42.根据本公开的一个实施例,控制器110还可以被配置为可以在每一次测距完成之后,检查信号直方图形态及峰值,并且根据信号直方图的饱和程度来调节一个或多个spad感光单元的偏置电压。具体地,当一次测距完成后,检查信号直方图的形态,如果信号直方图的峰值超过了阈值(诸如接收装置可接收的最大值的90%),则在下一帧中主动降低偏置电压;如果信号直方图的峰值处于预设范围(诸如接收装置可接收的最大值的30%~90%)之内,则保持偏置电压;如果信号直方图的峰值小于了阈值(诸如接收装置可接收的最大值的30%),则增加下一帧的偏置电压,其中,增加的偏置电压不超过最大阈值,诸如5v。增加的偏置电压所不超过的最大阈值的具体数值是示例性的,并且不将本发明限制为任何特定实施方式。
43.接收装置130还可以被配置为,其感光度可以通过spad传感器131上布置的一个或多个spad感光单元的偏置电压来调节。如图5所示,spad感光单元可以被配置为其pdp与偏置电压成正相关。例如,当spad感光单元的偏置电压从v2降低到v1时,spad感光单元的pdp从pdp2降低到pdp1。
44.使用时,当一次测距完成后,控制器110检查信号直方图的形态,其中,如果信号直方图的峰值超过了阈值,认为信号过强,需要降低感度,则控制器110在下一帧中主动降低偏置电压,由于一个或多个spad感光单元的pdp与偏置电压成正相关,一个或多个spad感光单元的pdp随之降低,接收装置130的感光度降低,因此下一帧中的信号直方图的峰值会比前一帧下降;如果信号直方图的峰值在下一帧预设范围之内,则认为偏置电压为合适,控制器110在后续测距中保持偏置电压,一个或多个spad感光单元的pdp随之保持不变,接收装置130的感光度不变;如果信号直方图的峰值小于了阈值,,则控制器110增加下一帧的偏置电压,一个或多个spad感光单元的pdp随之增加,接收装置130的感光度增加,因此下一帧中的信号直方图的峰值会比前一帧提高。在整个测距过程中均采用上述步骤。
45.图6是根据公开的实施例的vcsel的激光驱动电流和光功率的关系示图。
46.根据本公开的另一个实施例,控制器110还可以被配置为可以在每一次测距完成之后检查信号直方图形态及峰值,并且根据信号直方图的饱和程度来调节发射装置120的vcsel 121的激光驱动电流。具体地,当一次测距完成后,检查信号直方图的形态,如果信号直方图的峰值超过了阈值(诸如接收装置可接收的最大值的90%),则在下一帧中主动降低激光驱动电流;如果信号直方图的峰值处于预设范围(诸如接收装置可接收的最大值的30%~90%)之内,则保持激光驱动电流;如果信号直方图的峰值小于了阈值(诸如接收装置可接收的最大值的30%),则增加下一帧的激光驱动电流,其中,增加的激光驱动电流不超过最大阈值,诸如1a。增加的激光驱动电流所不超过的最大阈值的具体数值是示例性的,并且不将本发明限制为任何特定实施方式。
47.发射装置120还可以被配置为,其发光强度可以通过控制vcsel 121的激光驱动电流来调节。例如,vcsel 121可以被配置为其光功率与激光驱动电流成如图6所示的关系。当vcsel 121的激光驱动电流从i2降低到i1时,vcsel 121的光功率从p2降低到p1。
48.使用时,当一次测距完成后,控制器110检查信号直方图的形态,其中,如果信号直方图的峰值超过了阈值,认为信号过强,需要降低感度,则在下一帧中主动降低激光驱动电流,vcsel 121的光功率随之降低,发射装置120的发光强度降低,因此下一帧中的信号直方图的峰值会比前一帧下降;如果信号直方图的峰值在下一帧预设范围之内,则认为激光驱动电流为合适,在后续测距中保持激光驱动电流,vcsel 121的光功率随之保持不变,发射装置120的发光强度不变;如果信号直方图的峰值小于了阈值,则增加下一帧的激光驱动电流,vcsel 121的光功率随之提高,发射装置120的发光强度增加,因此下一帧中的信号直方图的峰值会比前一帧增加。在整个测距过程中均采用上述步骤。
49.图7是根据公开的实施例的控制器110调节单帧测距中短脉冲激光的脉冲个数的示图。
50.根据本公开的另一个实施例,控制器110还可以被配置为可以在每一次测距完成之后检查信号直方图形态及峰值,并且根据信号直方图的饱和程度来自动增加/减少测距次数。具体地,当一次测距完成后,检查信号直方图的形态,如果信号直方图的峰值超过了阈值(诸如接收装置可接收的最大值的90%),则在下一帧中主动减少单帧的短脉冲激光脉冲重复测试;如果信号直方图的峰值处于预设范围(诸如接收装置可接收的最大值的30%~90%)之内,则保持短脉冲激光脉冲重复测试;如果信号直方图的峰值小于了阈值(诸如接收装置可接收的最大值的30%),则增加下一帧的短脉冲激光脉冲重复测试,其中,增加的短脉冲激光脉冲重复次数不超过最大阈值,诸如,10000次。增加的短脉冲激光脉冲重复次数所不超过的最大阈值的具体数值是示例性的,并且不将本发明限制为任何特定实施方式。
51.使用时,当一次测距完成后,控制器110检查信号直方图的形态,其中,如果信号直方图的峰值超过了阈值,认为信号过强,需要降低感度,则在下一帧中主动减少单帧的短脉冲激光脉冲重复测试,下一帧中的信号直方图的峰值会比前一帧下降(诸如,图7中由图(a)中的n个减少到图(b)中的m个);如果信号直方图的峰值在下一帧预设范围之内,则认为短脉冲激光脉冲个数为合适,在后续测距中保持短脉冲激光脉冲个数;如果信号直方图的峰值小于了阈值,则增加下一帧的短脉冲激光脉冲重复次数,下一帧中的信号直方图的峰值会比前一帧增加。在整个测距过程中均采用上述步骤。
52.尽管已经用示例性实施例描述了本公开,但是可以向本领域技术人员建议各种组合、改变和修改。本公开旨在涵盖落入所附权利要求范围内的这种组合、改变和修改。
53.本发明中的任何描述都不应被理解为暗示任何特定的元件、步骤或功能是必须包括在权利要求范围内的必要元件。专利主题的范围仅由权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。