1.本发明涉及热流传感器技术领域,具体涉及一种用于高超声速激波风洞的片式集成铂膜热流传感器。
背景技术:
2.基于薄膜电阻热流传感器的测量技术作为激波风洞中气动热环境测量的一种重要方法,几十年来不断发展和创新。一方面,为了单位面积得到更多数据,集成化成为传感器技术发展的趋势。另一方面,为了减小传感器安装带来的测量误差,传感器小型化作为研究方向也一直在不断创新,从最早的直径5mm,到直径2mm,不论是从热敏原件工艺到银浆描涂工艺都有了长足进步。
3.其中,由于φ2玻璃圆柱端面上镀有铂膜,圆柱端面为测量面,因此模型的厚度以及轴向长度决定了传感器的体积以及传感器的安装局限性。例如在在飞行器模型的气动热监测面趋于平面且气动热的检测具备一定的梯度区域时,则无法通过φ2的现有柱状传感器进行安装和检测。
技术实现要素:
4.本发明的目的在于提供一种用于高超声速激波风洞的片式集成铂膜热流传感器,以解决现有技术中在飞行器模型的气动热监测面趋于平面且气动热的检测具备一定的梯度区域时,则无法通过的现有柱状传感器进行安装和检测技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.一种用于高超声速激波风洞的片式集成铂膜热流传感器,包括:
7.玻璃基底,所述玻璃基底呈片状;
8.铂薄膜线,具有多条,沿所述玻璃基底的宽度方向设置在所述玻璃基底表面;
9.所述玻璃基底的侧边设置有与每个所述铂薄膜线一一对应的银浆触点,且所述铂薄膜线与所述银浆触点电性连接;
10.其中,所述银浆触点远离所述铂薄膜线的端部用于进行导线的焊接。
11.作为本发明的一种优选方案,多条所述铂薄膜线在所述玻璃基底上依次形成第一铂薄膜线区域和第二铂薄膜线区域;
12.其中,所述第一铂薄膜线区域与所述第二铂薄膜线区域内的所述铂薄膜线均等间距设置,且所述第一铂薄膜线区域内的相邻两个所述铂薄膜线之间的间距小于所述第二铂薄膜线区域内相邻两个所述铂薄膜线之间的间距。
13.作为本发明的一种优选方案,位于所述铂薄膜线两端的所述银浆触点的底部沿所述玻璃基底的宽度方向在所述玻璃基底的底部表面延伸形成银浆线;
14.位于所述玻璃基底的底部表面的所述银浆线的宽度小于所述玻璃基底宽度的一半。
15.作为本发明的一种优选方案,所述玻璃基底包括矩形主体以及安装在所述矩形主
体上的薄层玻璃片,所述薄层玻璃片的四周边缘设置有垂直所述薄层玻璃片的挡边。
16.作为本发明的一种优选方案,所述矩形主体包括多个依次连接的用于设置所述铂薄膜线的铂膜基体,且相邻两个所述铂膜基体之间设置有伸缩件,所述伸缩件能够沿所述薄层玻璃片的长度方向上伸长和收缩;
17.其中,多个所述铂膜基体的端部设置有驱动器,所述驱动器用于驱动多个所述伸缩件沿所述薄层玻璃片的长度方向上进行同步的伸长和收缩。
18.作为本发明的一种优选方案,所述驱动器包括第一驱动部和第二驱动部,所述第一驱动部连接在多个所述铂膜基体的形成的整体的一端;
19.所述第二驱动部的输出端连接在所述多个所述铂膜基体的形成的整体与所述第一驱动部的连接处;
20.其中,所述第一驱动部利用受到的气动热变化实现沿所述薄层玻璃片长度方向的膨胀驱动多个所述伸缩件伸长;
21.所述第二驱动部用于将多个所述铂膜基体恢复至所述伸缩件没有发生伸缩的初始位置,后所述第二驱动部将跟随所述第一驱动部的驱动动作。
22.作为本发明的一种优选方案,所述第一驱动部包括密封囊体,所述密封囊体的两端均设置有导向板,所述导向板的端部与所述挡边的内壁滑动连接;
23.其中,所述密封囊体的侧表面的截面呈锯齿状,所述密封囊体的内部填充有可以通过温度变化进行膨胀或收缩的介质。
24.作为本发明的一种优选方案,所述第二驱动部包括电磁驱动底座以及滑动安装在所述电磁驱动底座上的动作件,所述动作件远离所述电磁驱动底座的端部连接在所述第一驱动部与所述铂膜基体的连接处;
25.其中,所述电磁驱动底座通过电磁驱动所述动作件沿所述薄层玻璃片的长度方向移动。
26.作为本发明的一种优选方案,所述玻璃基底的底部设置有与所述银浆线配合的线槽;所述玻璃基底的底部表面中间沿所述玻璃基底的长度方向设置有配线槽,且所述配线槽与所述线槽连通。
27.本发明与现有技术相比较具有如下有益效果:
28.本发明提供的片式集成铂薄膜线电阻传感器仍然具有直径两毫米薄膜传感器的优点,即具有高频响的特点,频响高达1mhz。同时减小作为传感器承载基体的玻璃基底的厚度后,使传感器可以应用于飞行器特别薄的部位测热,如翼面、舵面;同时在玻璃片上加密了测点分布,可以用于热流梯度较大的部位,如分离再附区等;并且测点的位置可以根据测量需要调整位置,可以使等间距,也可以是任意间距,从而能够进行飞行器表面具有一定梯度区分的气动热的测量。
附图说明
29.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
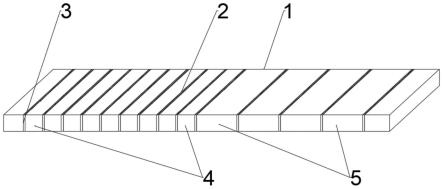
30.图1为本发明实施例提供基于片状玻璃基底的热流传感器的结构示意图;
31.图2为本发明实施例提供图1中玻璃基底的底部表面的结构示意图;
32.图3为本发明实施例提供具有薄层玻璃片的热流传感器的结构示意图;
33.图4为本发明实施例提供具备第一驱动部和第二驱动部的热流传感器的结构示意图;
34.图5为本发明实施例提供图4中的第二驱动部的电磁驱动座和动作件的理想装配的结构示意图。
35.图中的标号分别表示如下:
36.1-玻璃基底;2-铂薄膜线;3-银浆触点;4-第一铂薄膜线区域;5-第二铂薄膜线区域;6-银浆线;7-矩形主体;8-薄层玻璃片;9-挡边;10-配线槽;11-线槽;
37.71-铂膜基体;72-伸缩件;73-驱动器;74-第一驱动部;75-第二驱动部;741-密封囊体;742-导向板;751-电磁驱动底座;752-动作件。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.如图1至图5所示,本发明提供了一种用于高超声速激波风洞的片式集成铂膜热流传感器,包括:
40.玻璃基底1,玻璃基底1呈片状;
41.铂薄膜线2,具有多条,沿玻璃基底1的宽度方向设置在玻璃基底1表面;
42.玻璃基底1的侧边设置有与每个铂薄膜线2一一对应的银浆触点3,且铂薄膜线2与银浆触点3电性连接;
43.其中,银浆触点3远离铂薄膜线2的端部用于进行导线的焊接。
44.本发明中,采用玻璃基底1构建片式集成铂膜热流传感器的其具体的测量原理是,测点就是传感器的有效元件,铂薄膜线电阻温度计的有效元件就是铂薄膜线2,将铂金属薄膜镀在非金属材料上(玻璃或陶瓷),当铂金属薄膜受到气动热时,铂金属薄膜的阻值发生改变,阻值变化反映出表面温度变化历程。
45.本发明中提供的片式集成铂薄膜线2的电阻传感器仍然具有φ2薄膜传感器的优点,即具有高频响的特点(频响高达1mhz)。另外减小玻璃基底的厚度后,使传感器可以应用于飞行器特别薄的部位测热,如翼面、舵面。
46.同时在玻璃片上加密了测点分布,可以用于热流梯度较大的部位,如分离再附区等;并且测点的位置可以根据测量需要调整位置,可以使等间距,也可以是任意间距,最小间隔可达到1mm。
47.但在实际的测量过程中,为了尽可能的获得不同高超声速激波风洞实验中,超声速激波的声速变化对于翼面热量分布的精细化测量,也就是说,激波风速越快,在飞行器翼面或者舵面等单位长度上的温升变化快,为了能够获得这部分热流数据的精细化采集,本发明的多条铂薄膜线2在玻璃基底1上依次形成第一铂薄膜线区域4和第二铂薄膜线区域5;
其中,第一铂薄膜线区域4与第二铂薄膜线区域5内的铂薄膜线2均等间距设置,且第一铂薄膜线区域4内的相邻两个铂薄膜线2之间的间距小于第二铂薄膜线区域5内相邻两个铂薄膜线2之间的间距。也就是通过在同一玻璃基底1上设置多种间距数值的铂薄膜线2区域来进行多种激波风速的测量。
48.本发明在便于热流传感器在翼面和舵面的安装问题上,将位于铂薄膜线2两端的银浆触点3的底部沿玻璃基底1的宽度方向在玻璃基底1的底部表面延伸形成银浆线6;位于玻璃基底1的底部表面的银浆线6的宽度小于玻璃基底1宽度的一半,通过银浆线6延长焊接导线和铂薄膜线2的连接距离,便于焊接导线的走线。
49.进一步地,本发明中玻璃基底1包括矩形主体7以及安装在矩形主体7上的薄层玻璃片8,其中薄层玻璃片8的厚度控制在0.1~0.2mm,其目的是匀一化每个铂薄膜线2的受热来提高铂膜热流传感器的数据采集精度,其主要是因为,现有的铂膜热流传感器的铂薄膜线2均采用多次烧结的方式与基体表面进行融合,而烧结的过程可能会产生凹凸不平的凸起,使得传感器的表面在对激波进行传导上产生阻碍,这就会使得该部分的铂薄膜线2采集的温升发生异常,造成采集数据的误差。
50.当然这其中,在本发明提出的热流传感器的制备过程中,需要先进行铂薄膜线2与矩形主体7的表面进行烧结,随后将矩形主体7和薄层玻璃片8进行烧结,并且烧结的过程中,利用目标舵面或者翼面的曲度的弧形面模具对薄层玻璃片8的上表面进行压持,这样薄层玻璃片8与矩形主体7的表面能够进行贴合,同时薄层玻璃片8能够与目标飞行器的舵面或者翼面进行准确的配合。
51.而薄层玻璃片8的四周边缘设置有垂直薄层玻璃片8的挡边9是为了保持矩形主体7能够被整体进行安装在目标飞行器的舵面或者翼面上。
52.在上述对于也就是通过在同一玻璃基底1上设置多种间距数值的铂薄膜线2区域来进行多种激波风速的测量,虽然能够获得一定设定参数的温升测量,也就是多种激波风速和温升的关系的测量,但是结构上相对固定,在对应实验过程中的多种变化情况,要么需要更换热流铂膜热流传感器或者在单位长度上的目标飞行器的舵面或者翼面上设置超过三种以上间距的铂薄膜线区域,那么每一种显然不能满足高精度的测量,并且如果热流传感器的传导长度较长的话,铂膜热流传感器并不能代表目标飞行器的舵面或者翼面的结构强度,因此也无法较为提高数据采集精度。为此,本发明中矩形主体7包括多个依次连接的用于设置铂薄膜线2的铂膜基体71,且相邻两个铂膜基体71之间设置有伸缩件72,伸缩件72能够沿薄层玻璃片8的长度方向上伸长和收缩;其中,多个铂膜基体71的端部设置有驱动器73,驱动器73用于驱动多个伸缩件72沿薄层玻璃片8的长度方向上进行同步的伸长和收缩。
53.也就是在上述的玻璃基底1的结构上,构建多个铂薄膜线2之间间距的可调节,为此,驱动器73包括第一驱动部74和第二驱动部75,第一驱动部74连接在多个铂膜基体71的形成的整体的一端;第二驱动部75的输出端连接在多个铂膜基体71的形成的整体与第一驱动部74的连接处;
54.其中,第一驱动部74利用受到的气动热变化实现沿薄层玻璃片6长度方向的膨胀驱动多个伸缩件72伸长;第二驱动部75用于将多个铂膜基体71恢复至伸缩件72没有发生伸缩的初始位置,后第二驱动部75将跟随第一驱动部74的驱动动作。
55.本发明中为了实现在实验过程中的多次测量,那么需要多个铂膜基体71之间的相
对位置的变化,同时也需要多个铂膜基体71能够恢复初始设定的位置,但由于本发明中第一驱动部74是能够根据飞行器表面的气动热增加时进行驱动,那么第二驱动部75则需要对第一驱动去74在驱动时产生的抵抗阻力要尽可能的小。
56.现有的微型马达虽然能够实现第二驱动部75的功能,但在实际运动的过程中,需要对微型马达进行与第一驱动部74的同步电信号控制,并且微型马达在反向运动时是存在螺杆与驱动部之间的螺旋转动的阻力,从而影响第一驱动部74的根据飞行器表面的气动热增加时进行驱动的驱动动作。
57.而直线电机无法结合本发明中热流传感器的尺寸进行理想化的结构缩小,且在结构缩小上具备一定的难度。
58.本发明通过驱动器73和气动热在产生时的配合,从而实现热流传感器的测量点(铂薄膜线的间距分布),以适应性的实现多个铂薄膜线2之间的间距主动变化,具体地,当飞行器表面的气动热增加时,飞行器表面的单位距离的气动热变化程度较大,驱动器73驱动压缩(提供沿玻璃基底1长度方向的作用力)多个伸缩件72,从而使得多个铂膜基体71相互靠近,从而缩小设置在多个铂膜基体71上的铂薄膜线2的间距,反之,对伸缩件72进行拉伸。
59.进一步地,本发明中能够实现上述第一驱动部74的现有结构或者技术手段有很多,本发明为了能够准确的描述其实现过程提供一种具体的实施例,第一驱动部74包括密封囊体741,密封囊体741的两端均设置有导向板742,导向板742的端部与挡边7的内壁滑动连接;其中,密封囊体741的侧表面的截面呈锯齿状,为了能够实现密封囊体741沿薄层玻璃片8的长度方向上的收缩,密封囊体741的内部填充有可以通过温度变化进行膨胀或收缩的介质,也就是要在实验过程中的填充在密封囊体741中的介质的膨胀系数要适合激波风洞实验中的温升范围即可。
60.进一步地,本发明中第二驱动部75的主要目的是实现与第一驱动部74相反的驱动从而使得多个铂膜基体71恢复至设置的初始间距(或者第二驱动部75的驱动行程大于所述第一驱动部74)。
61.为此,为解决上述中,第二驱动部75可能会影响第一驱动部74的驱动问题提供一种具体的第二驱动部75的实施例,第二驱动部75包括电磁驱动底座751以及滑动安装在电磁驱动底座751上的动作件752,动作件752远离电磁驱动底座751的端部连接在第一驱动部74与铂膜基体71的连接处;其中,电磁驱动底座751通过电磁驱动动作件752沿薄层玻璃片8的长度方向移动。
62.也就是说,本发明中的第二驱动部75具体可以通过电磁驱动的方式进行驱动,由于电磁在不通电的时候,动作件752只要有运动反向的限制下,则在该运动反向上是完全自由的,其阻力也就可以通过动作件752与电磁驱动底座751之间的光滑程度决定。
63.其中,电磁驱动座751具体可以为中空柱状结构,动作件752轴向安装在电磁驱动座751的轴线上,动作件752具体为永磁体,而中空柱状结构的内壁上设置有电磁线圈。中空柱状结构的直径可以控制在3~4mm,甚至更小。
64.进一步地,本发明中的玻璃基底1的底部设置有与银浆线6配合的线槽11;玻璃基底1的底部表面中间沿玻璃基底1的长度方向设置有配线槽10,且配线槽10与线槽11连通。其目的是,配线槽10可以用于进行焊接导线的走线,并且在上述的第一驱动部74和第二驱
动部75的安装中,可以将第二驱动部75安装在配线槽10中。
65.补充说明地是,本发明中片式集成传感器的基底厚度可减小到1mm,可用于飞行器翼面和舵面等较薄的区域测热,通过在1mm厚的玻璃片上集成最小间隔为1mm多个测点,且测点的位置和间隔可以任意设计,测点尺寸0.1
×
4mm,从而解决φ2传感器在厚度(>5mm)和间隔(>2mm)上的限制。传感器厚度1mm,传感器集成多个测点,间隔可小至1mm。
66.第一驱动部74在结构参数(厚度和宽度)上可以与铂膜基体71保持一致,而第二驱动部75在结构的厚度上可以控制在2-3mm左右,但铂膜基体71的整体厚度是可以控制在1mm左右,也就是说第二驱动部75的结构并不影响传感器整体在舵面或者飞行器翼面的安装。
67.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。