1.本技术涉及医疗器械的技术领域,尤其涉及一种用于快速定位脊椎麻醉点位的方法和装置。
背景技术:
2.一个成人的脊柱由26块椎骨(包括颈椎7块,胸椎12块,腰椎5块,骶骨1块(由5块骶椎融合构成)、尾骨1块(由3-4块尾椎融合构成))借韧带、关节及椎间盘连接而成。脊柱上端承托颅骨,下联髋骨,中附肋骨,并作为胸廓、腹腔和盆腔的后壁。脊柱具有支持躯干、保护内脏、保护脊髓和进行运动的功能。脊柱内部自上而下形成一条纵行的脊管,内有脊髓。
3.平时工作、生活中,因长期姿态不正或操劳过度等原因,与椎骨有关的疾病问题无时无刻不在困扰着人们。常见的,与颈椎有关的病症通常有头痛或偏头痛、头晕眼花、耳鸣或听力下降,不明原因的反复落枕等;与腰椎有关的病症通常有腰部疼痛、下肢麻木、下肢无力,可以表现为身心乏力,间接性跛行、马尾综合征等;与胸椎有关的病症通常有前胸、后背疼痛,其次肋骨部位也会有针刺一样的痛感,叩击疼痛比较明显、恶心和呼吸困难等。上述病症,严重时则需要进行住院和手术处理,而手术前的麻醉步骤则必不可少。
4.麻醉分为全麻和局麻。以腰部的局麻为例,目前,医护人员定位麻醉部位时,其中一个方法,根据病患的口述内容再结合行医经验,大致推断出病症的可能出现的根源部位,然后通过手指按压病患根源部位附近,并实时询问病患是否对该根源部位有反应,若有,则可以大致确定需要麻醉的点位,这种方式需要患者准确表达病症,也依赖于医护人员的行医经验,主观性比较强;其中另一方法,就是根据拍片(例如,常见的b超、ct、x光片、核磁共振等)的结果来判断病症的根源部位,进而确定需要麻醉的点位,这种方式准确性虽然能得到一定的保证,但也存在着要求较多(例如,要求病患空腹、不能佩戴饰品等)、耗时较长(例如,需要病患来回穿梭不同的科室、等待拍片结果)、且费用较高等系列的问题。
5.鉴于此,克服该现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
6.本技术要解决的技术问题是提供一种用于快速定位脊椎麻醉点位的方法和装置,用以解决传统方法确定麻醉点位主观性比较强或者要求较多、耗时较长以及费用较高等问题。
7.为了解决上述技术问题,本技术采用如下技术方案:
8.第一方面,本技术提供一种用于快速定位脊椎麻醉点位的装置,装置包括:
9.壳体、设置在所述壳体上用于与人体背部完成适配的固定组件2、分布在所述壳体上的声波探测阵列、麻醉点位标记伺服组件和主控电路板;
10.所述声波探测阵列和所述麻醉点位标记伺服组件分别与所述主控电路板电连;
11.所述声波探测阵列对称的分布在所述壳体1的左右两侧,用于在通过所述固定组件完成与人体背部适配后,通过声波探测将探测数据反馈给所述主控电路板;
12.所述主控电路板根据所述声波探测阵列的探测数据确定出背部肋骨位置和肋骨延伸轨迹;
13.所述麻醉点位标记伺服组件在所述主控电路板的控制下,根据所述确定出背部肋骨位置和肋骨延伸轨迹,向预设的目标麻醉点位移动,并在抵达所述目标麻醉点位后完成相应的标注动作。
14.优选的,所述声波探测阵列由至少两列声波探测器组构成,其中,每一声波探测器组的排列方向与脊柱延伸方向相同,所述声波探测阵列对称的分布在所述壳体的左右两侧,具体包括:
15.所述声波探测阵列中的第一声波探测器组和第二声波探测器组对称的分布在所述麻醉点位标记伺服组件的两侧;
16.所述第一声波探测器组和所述第二声波探测器组分别将各自声波探测数据反馈给所述主控电路板,以便所述主控电路板根据所述第一声波探测器组1和所述第二声波探测器组反馈的声波探测数据还原出肋骨位置和肋骨延伸轨迹。
17.优选的,所述声波探测阵列还包括第三声波探测器组和第四声波探测器组;
18.所述第三声波探测器组设置在所述第一声波探测器组相差第一预设距离的并排位置;所述第四声波探测器组设置在所述第二声波探测器组相差第一预设距离的并排位置;
19.所述主控电路板根据所述第一声波探测器组和所述第三声波探测器组反馈的二维声波探测数据生成位于背部脊柱左侧的肋骨位置和肋骨延伸轨迹;
20.所述主控电路板根据所述第二声波探测器组和所述第四声波探测器组反馈的二维声波探测数据生成位于背部脊柱右侧的肋骨位置和肋骨延伸轨迹;
21.所述主控电路板根据所述左侧的肋骨位置和肋骨延伸轨迹数据,以及右侧的肋骨位置和肋骨延伸轨迹数据,模拟出背部脊柱中胸椎和腰椎的空间位置。
22.优选的,所述麻醉点位标记伺服组件包括位于所述壳体中部的滑槽,形成麻醉点位标记本体的滑块,设置在所述滑块内的第一伺服电机和第二伺服电机,标注笔;
23.所述第一伺服电机用于驱动所述滑块在所述滑槽内的纵向移动,从而带动所述滑块沿着脊柱延伸方向完成上下移动;
24.所述第二伺服电机用于驱动所述标注笔在所述滑块内部完成横向移动,从而在所述纵向移动配合下带动所述标注笔移动到目标胸椎和腰椎的麻醉位置。
25.优选的,装置还包括主控面板,具体的:
26.所述主控面板与所述主控电路板电气连接,用于呈现脊柱模拟结构图,供操作人员选择目标麻醉点位;
27.所述主控电路板在获取到相应的目标麻醉点位信息后,通过所述声波探测阵列和所述麻醉点位标记伺服组件完成所述目标麻醉点位的标注动作。
28.优选的,所述设置在所述壳体上用于与人体背部完成适配的所述固定组件,具体为布局在所述壳体四个角落上的吸盘构成。
29.第二方面,本技术提供一种用于快速定位脊椎麻醉点位的方法,方法包括:
30.获取目标麻醉点位的位置信息;所述位置信息包括脊柱上背椎编号或腰椎编号;
31.启动装置中的所述第一声波探测器组和所述第二声波探测器组的声波探测功能;
32.所述主控电路板根据所述第一声波探测器组和所述第二声波探测器组的声波探测数据确定当前装置放置到病患预设的固定区域时,提醒操作人员通过所述固定组件完成装置与病患适配;
33.在装置完成适配固定后,所述主控电路板根据所述第一声波探测器组和所述第二声波探测器组新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置;所述主控电路根据所述模拟出背部脊柱中胸椎和腰椎的空间位置,控制麻醉点位标记伺服组件抵达目标麻醉点位的位置后完成标记。
34.优选的,所述第一声波探测器组和第二声波探测器组在所述壳体上分别拥有各自的横向滑轨,则所述主控电路板根据所述第一声波探测器组和第二声波探测器组新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置,具体包括:
35.所述主控电路板通过控制所述第一声波探测器组和所述第二声波探测器组在所述壳体上的横向移动,采集到多组声波探测数据,并根据相应多组声波探测数据模拟出背部脊柱中胸椎和腰椎的空间位置。
36.优选的,本技术提供另一种用于快速定位脊椎麻醉点位的方法,方法包括:
37.获取目标麻醉点位的位置信息;所述位置信息包括脊柱上背椎编号或腰椎编号;
38.启动装置中的所述第一声波探测器组、所述第二声波探测器组、所述第三声波探测器组和所述第四声波探测器组的声波探测功能;
39.在装置完成适配固定后,所述主控电路板根据所述第一声波探测器组、所述第二声波探测器组、所述第三声波探测器组和所述第四声波探测器组新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置;所述主控电路根据所述模拟出背部脊柱中胸椎和腰椎的空间位置,控制麻醉点位标记伺服组件抵达目标麻醉点位的位置后完成标记。
40.优选的,还包括第五声波探测器组和第六声波探测器组,所述第五声波探测器组和所述第六声波探测器组分别设置在所述第三声波探测器组和所述第四声波探测器组一侧;
41.从而由所述第一声波探测器组、所述第三声波探测器组和所述第五声波探测器组排列构成的对左侧肋骨位置和肋骨延伸轨迹的声波探测数据采集;以及,由所述第二声波探测器组、所述第四声波探测器组和所述第六声波探测器组排列构成的对左侧肋骨位置和肋骨延伸轨迹的声波探测数据采集;最终模拟出背部脊柱中胸椎和腰椎的空间位置。
42.本技术所采取的以上技术方案与现有技术相比,具有如下有益效果:
43.本技术通过设置的声波探测阵列,能实时对人体左侧肋骨和左侧肋骨进行数据探测,经所述主控电路板确定出背部肋骨位置和肋骨延伸轨迹,并通过背部肋骨位置和肋骨延伸轨迹定位脊椎麻醉点位,能客观和准确地确定脊椎麻醉点位,整个定位过程耗时短、费用低,能大大节省病患的就医时间和费用,提升了医疗的效率,进而提升病患的就医满意度。
附图说明
44.下面结合附图,通过对本技术的具体实施方式详细描述,将使本技术的技术方案及其它有益效果显而易见。
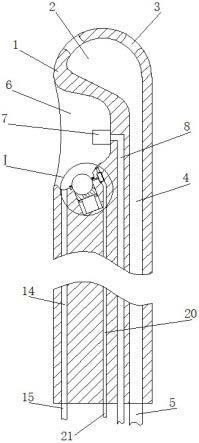
45.图1是实施例1提供的一种用于快速定位脊椎麻醉点位的装置结构图;
46.图2是实施例1提供的一种用于快速定位脊椎麻醉点位的装置正视图;
47.图3是实施例1提供的一种用于快速定位脊椎麻醉点位的装置仰视图;
48.图4是实施例1提供的一种用于快速定位脊椎麻醉点位的装置俯视图;
49.图5是实施例1提供的一种用于快速定位脊椎麻醉点位的装置中的麻醉点位标记伺服组件结构图;
50.图6是实施例1提供的一种用于快速定位脊椎麻醉点位的装置中的麻醉点位标记伺服组件结构图;
51.图7是实施例1提供的一种用于快速定位脊椎麻醉点位的装置中的麻醉点位标记伺服组件结构图;
52.图8是实施例2提供的一种用于快速定位脊椎麻醉点位的装置结构图;
53.图9是实施例2提供的一种用于快速定位脊椎麻醉点位的装置的一应用示意图;
54.图10是实施例2提供的一种用于快速定位脊椎麻醉点位的装置的另一应用示意图;
55.图11是实施例3提供的一种用于快速定位脊椎麻醉点位的方法流程图;
56.图12是实施例4提供的一种用于快速定位脊椎麻醉点位的方法流程图;
57.图13是实施例5提供的一种用于快速定位脊椎麻醉点位的装置电路连接图。
58.在附图中,相同的附图标记用来表示相同的部件或结构,其中:
59.1-壳体;2-固定组件;3-声波探测阵列,31-第一声波探测器组,32-第二声波探测器组,33-第三声波探测器组,34-第四声波探测器组,35-第五声波探测器组,36-第六声波探测器组;4-麻醉点位标记伺服组件,41-滑槽,42-滑块,43-第一伺服电机,44-第二伺服电机,45-标注笔,46-直槽口,47-第一卡扣,48-第二卡扣,49-压缩弹簧;5-主控电路板;6-主控面板,61-摇杆,62-按键。
具体实施方式
60.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
61.在本技术的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
62.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
63.实施例1:
64.为了快速和准确地找到人体脊椎麻醉点位的位置,本发明实施例1提供了一种用
于快速定位脊椎麻醉点位的装置,如图1-图4所示,包括壳体1、设置在所述壳体1上用于与人体背部完成适配的固定组件2、分布在所述壳体1上的声波探测阵列3、麻醉点位标记伺服组件4和主控电路板5,具体的:所述声波探测阵列3和所述麻醉点位标记伺服组件4分别与所述主控电路板5电连;所述声波探测阵列3对称的分布在所述壳体1的左右两侧,用于在通过所述固定组件2完成与人体背部适配后,通过声波探测将探测数据反馈给所述主控电路板5;所述主控电路板5根据所述声波探测的探测数据确定出背部肋骨位置和肋骨延伸轨迹;所述麻醉点位标记伺服组件4在所述主控电路的控制下,根据所述确定出背部肋骨位置和肋骨延伸轨迹,向预设的目标麻醉点位移动,并在抵达所述目标麻醉点位后完成相应的标注动作;在物理连接结构上,所述固定组件2设置在所述壳体1上,所述声波探测阵列3分布设置在所述壳体1上,所述麻醉点位标记伺服组件4位于所述壳体1上方并与所述壳体1活动连接;在电气连接方式上,所述声波探测阵列3和所述麻醉点位标记伺服组件4分别与所述主控电路板5电连,其中,所述主控电路板5设于所述麻醉点位标记伺服组件4内(也即下述滑块42内),所述声波探测阵列3与所述主控电路板5电连方式可以为有线连接方式(如图1所示),或者无线连接方式(如图8所示),具体的,所述声波探测阵列3和所述麻醉点位标记伺服组件4与所述主控电路板5之间的电信号传输过程为:首先,所述声波探测阵列3将探测数据反馈给所述主控电路板5,然后,所述主控电路板5根据所述声波探测的探测数据确定出背部肋骨位置和肋骨延伸轨迹,最后,所述麻醉点位标记伺服组件4在所述主控电路的控制下,根据所述确定出背部肋骨位置和肋骨延伸轨迹,向预设的目标麻醉点位移动,并在抵达所述目标麻醉点位后完成相应的标注动作,上述过程,优选通过自动的方式实现,以替代传统的医生凭借自身经验或者根据病患的口述信息或者拍片的结果等方式,来实现人体脊椎麻醉点位的定位,定位准确度高、定位速度快,麻醉的药效好,不仅能有效减轻定位不准确后导致的病患就医过程的痛苦,还能节省了病患在不同科室之间来回走动和等待拍片结果的时间,节省了就医的费用,提升了医疗的效率,进而提升病患的就医满意度。
65.在实际应用过程中,所述壳体1会经常性的与病患的脊椎部的皮肤接触,考虑到人体皮肤会分泌出的汗渍和油污,为了保证所述壳体1的清洁和卫生,在本实施例中,所述壳体1优先使用带有防水和防油的结构或者材质,以便于所述壳体1在使用过程中较长时间的保持干净,同时也便于所述壳体1后期的清洁和维护,另外,所述壳体1还可以使用硬度不太高的材料或面料制作,例如,皮革或帆布,如此,所述壳体1与病患的脊椎部的皮肤接触时舒适度也会更好一些,进一步的,为了使得所述壳体1能更好的与病患的脊椎部的皮肤贴合,所述壳体1的两侧沿人体背部肋骨延伸方向还分别设有一个弧面,从而使得所述壳体1与病患背部肋骨贴合得更为紧密。
66.在本实施例中,所述固定组件2用于与人体背部完成适配,进而实现整个装置的固定,所述固定组件2可以设置为套绳、背带、卡扣等结构等,具体应用过程中,当所述固定组件2为套绳时,则可以通过套设在病患的颈部的方式实现整个装置的固定,当所述固定组件2为背带时,则可以通过跨在病患的双肩上的方式实现整个装置的固定,当所述固定组件2为卡锁扣时,则可以通过锁紧的方式环绕于病患的胸部的方式实现整个装置的固定,作为一种优选的实现方式,如图3所示,所述设置在所述壳体1上用于与人体背部完成适配的所述固定组件2,具体为布局在所述壳体1四个角落上的吸盘构成,具体实现时,所述吸盘可以设置为吸气盘或者吸气囊,所述吸盘产生吸力的实现原理为:通过挤压的方式,将所述吸盘
中的空气排出,所述吸盘由于有一定向外的弹力将其内部的剩余的空气体积扩大,使所述吸盘内部气压小于外部的大气压,从而使得所述吸盘产生吸附能力,为了使得所述吸盘在吸附过程中更为平稳和可靠,在设置方式上,所述吸盘优选设置在所述壳体1四个角落上。在具体实现过程中,可以采用直接吸盘方式,也可以采用气囊按压释放内部气体后形成的吸附方式(此方式未在图中直接呈现,可参照心电测试仪)。
67.所述肋骨是一种弧形小骨,一端连于躯干部脊椎骨的两侧,路体壁向展面弯曲,另一端连于胸部中央的胸骨上,人体肋骨一共有12对,左右对称。在本实施例中,所述声波探测阵列3,用于探测得到能确定出病患的背部肋骨位置和肋骨延伸轨迹的数据,然后将探测数据反馈给所述主控电路板5,为了实现定位的准确性,需要尽可能得到更多的探测数据,所述声波探测阵列3由至少两列声波探测器组构成,其中,每一声波探测器组的排列方向与脊柱延伸方向相同,每一声波探测器组包括有一定数量的声波探测器,且每一声波探测器组的声波探测器数量相同,当所述固定组件2与人体背部完成适配和固定后,每一声波探测器组中的每一声波探测器都会以广播的形式向人体方向发出超声波信号,结合人体的肋骨位置和肋骨延伸轨迹的对称性,所述声波探测阵列3对称的分布在所述壳体1的左右两侧,如图4所示,具体包括:所述声波探测阵列3中的第一声波探测器组31和第二声波探测器组32对称的分布在所述麻醉点位标记伺服组件4的两侧,之所以将所述声波探测阵列3中的所述第一声波探测器组31和所述第二声波探测器组32对称的分布在所述麻醉点位标记伺服组件4的两侧,以便于所述声波探测阵列3能快速的探测得到确定出病患的背部肋骨位置和肋骨延伸轨迹的数据,具体实现时,所述第一声波探测器组31和所述第二声波探测器组32分别将各自声波探测数据反馈给所述主控电路板5,以便所述主控电路板5根据所述第一声波探测器组31和所述第二声波探测器组32反馈的声波探测数据还原出肋骨位置和肋骨延伸轨迹,在本实施例中,所述主控电路板5根据所述第一声波探测器组31和所述第二声波探测器组32反馈的声波探测数据还原出肋骨位置和肋骨延伸轨迹,其实现原理在于:因人体的血肉部分和肋骨部分的密度不同,不同肋骨的位置和延伸轨迹(长度)不一样,当超声波信号分别从所述第一声波探测器组31和所述第二声波探测器组32向人体方向发出时,超声波信号穿透人体后会在发生衰减,具体来说,超声波信号会沿人体肋骨位置和肋骨延伸轨迹发生衰减的程度会多于超声波信号穿透人体血肉部分发生衰减的程度,经所述主控电路板5处理后,进而生成与人体肋骨位置和肋骨延伸轨迹相匹配的一维数据图像,所述第一声波探测器组31和所述第二声波探测器组32中每一声波探测器都可以分别确定出位于在该声波探测器前方(包括正前方和斜前方)的是人体的血肉部分还是肋骨部分,如果是肋骨部分,则肋骨位置和肋骨延伸轨迹可以通过所述主控电路板5计算和还原得出,在本实施例中,所述第一声波探测器组31和所述第二声波探测器组32分别对人体脊椎的左侧和右侧进行探测,以所述第一声波探测器组31中包括3个声波探测器为例,3个声波探测器分别向人体方向发出超声波信号,3个声波探测器分别探测得到3组探测数据,所述第一声波探测器组31将上述3组波探测数据传输反馈给所述主控电路板5,进而由所述主控电路板5计算和还原出左侧肋骨位置和肋骨延伸轨迹,基于同样的原理和方式,所述第二声波探测器组32也将3组波探测数据传输反馈给所述主控电路板5,进而由所述主控电路板5计算和还原出右侧肋骨位置和肋骨延伸轨迹,结合所述第一声波探测器组31和所述第二声波探测器组32的探测数据,所述主控电路板5最终计算和还原出整个肋骨位置和肋骨延伸轨迹。需要说明
的是,在本实施例中,是以所述第一声波探测器组31和所述第二声波探测器组32具体的数量分别为3个为例进行说明的,实际应用过程中,所述第一声波探测器组31和所述第二声波探测器组32每组具体的数量越多,得到的探测数据也就越多,定位的准确程度也就越高。
68.为了实现所述麻醉点位标记伺服组件4与所述壳体1活动连接,作为一种优选的实现方式,分别如图4-图5以及图13所示,所述麻醉点位标记伺服组件4包括位于所述壳体1中部的滑槽41,以及组成麻醉点位标记本体的滑块42,设置在所述滑块42内的第一伺服电机43和第二伺服电机44,还有标注笔45共同构成,在本实施例中,所述麻醉点位标记伺服组件4与所述壳体1的活动连接采取滑动连接的结构:所述滑槽41以及所述滑块42的配合来实现,在实现过程中,所述滑槽41设于所述壳体1上表面靠近所述壳体1的中间部分,横跨于所述壳体1的左右两侧,所述第一伺服电机43和所述第二伺服电机44优选同样的型号,所述第一伺服电机43和所述第二伺服电机44分别在设置在所述滑块42内,所述第一伺服电机43和所述第二伺服电机44的用途并不相同,具体的:所述第一伺服电机43用于驱动所述滑块42在所述滑槽41内的纵向移动,从而带动所述滑块42沿着脊柱延伸方向完成上下移动;所述第二伺服电机44用于驱动所述标注笔45在所述滑块42内部完成横向移动,从而在所述纵向移动配合下带动所述标注笔45移动到目标胸椎和腰椎的麻醉位置,在实现方式中,所述滑槽41的宽度也经过操作宽度设计,即实际注射过程中可以是在所述标注笔45完成标注后,借助所述滑槽41移开的方式,让渡出被标记的滑槽41空挡区域供注射麻醉剂;还存在一种方式就是取下整个装置后进行麻醉剂的注射,这两种方式在本发明实施例中均可采用。为了实现所述标注笔45在所述滑块42内部完成横向移动,如图6-图7所述,所述麻醉点位标记伺服组件4还包括一个直槽口46、第一卡扣47和第二卡扣48,所述直槽口46贯穿设于所述滑块42,所述第一卡扣47和所述第二卡扣48分别位所述滑块42上下侧,所述第一卡扣47和所述第二卡扣48通过卡合连接和或者螺纹连接的方式,形成一个中空的类似“工”字型的结构,该“工”字型结构以嵌入的方式嵌入在所述直槽口46中并能沿所述直槽口46开设的方向左右滑动,所述标注笔45穿设通过所述第一卡扣47和所述第二卡扣48,使用时,为了实现所述标注笔45能在病患脊椎上的目标位置上完成标注动作,所述麻醉点位标记伺服组件4还包括一个压缩弹簧49,所述压缩弹簧49设于由所述第一卡扣47和所述第二卡扣48连接之后的形成的一个密封的空间中,所述压缩弹簧49与所述标注笔45抵触连接,当需要使用所述标注笔45完成标注动作时,用一个外力(可以采用手动,优选的,采用在标注笔45侧壁上设置齿轮轨道,配合滑块42上的电机齿轮驱动,完成自主标记;还可选的是,采用内部电机实现的微型气泵形成推动力,并配合相应的压缩弹簧49构成回复力实现)按压所述标注笔45,所述标注笔45将外力传递到所述压缩弹簧49上,使得所述压缩弹簧49在外力作用下发生形变,此时,所述标注笔45向人体方向靠近并与病患脊椎上的目标位置接触从而完成标注动作,标注完成后,撤去外力,所述标注笔45在所述压缩弹簧49的恢复力作用下背向人体方向并与病患脊椎上的目标位置分离开,所述标注笔45恢复到原位,所述标注笔45优选使用水性记号笔,这样在标注完成后,可以很方面的擦除标注的印记,同时,考虑到所述标注笔45中的颜色水一定时间后可能会使用完,为了便于所述标注笔45后期的更换,当需要更换所述标注笔45时,可以将所述第一卡扣47和所述第二卡扣48分开,取下所述标注笔45更换即可,在本实施例中,为了便于理解,上述结构和使用过程,可以近似地理解为一个“圆珠笔”的结构和使用方式,其中,所述第一卡扣47和所述第二卡扣48类似“笔筒”,所述标注笔45则
类似“笔芯”,所述压缩弹簧49则等同于“圆珠笔”中的弹簧。
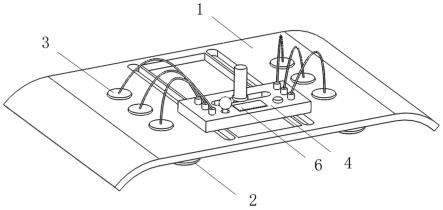
69.为了实现麻醉点位的可视化,同时,使得整个装置的使用过程更为便利,如图1所示,装置还包括主控面板6,具体的:所述主控面板6与所述主控电路板5电气连接,用于呈现脊柱模拟结构图,供操作人员选择目标麻醉点位;所述主控电路板5在获取到相应的目标麻醉点位信息后,通过所述声波探测阵列3和所述麻醉点位标记伺服组件4完成所述目标麻醉点位的标注动作,所述主控面板6优先使用可操控的lcd屏,所述lcd屏可以为电容屏或电阻屏并带有缩放功能,还能支持局部部位的放大,上述脊柱模拟结构图和目标麻醉点位信息,可以分别以影像图或者坐标图的方式呈现,以便于操作人员选择目标麻醉点位,另外,本实施例还提供了一种对装置的手动操控方式,即与所述主控面板6配合使用的,还包括摇杆61和按键62,其中,所述摇杆61和所述按键62分别与所述主控电路板5连接,在所述主控电路板5的作用下,通过控制所述摇杆61和所述按键62,也能实现所述麻醉点位标记伺服组件4和所述主控面板6操控。例如,通过按键62实现上述的在标注笔45侧壁上设置齿轮轨道,配合滑块42上的电机齿轮驱动,完成自主标记;或者,触发内部电机实现的微型气泵形成推动力,推动标注笔45的笔头完成标记。
70.实施例2:
71.在实施例1中,所述声波探测阵列3包括所述第一声波探测器组31和第二声波探测器组32,所述第一声波探测器组31用于探测左侧肋骨位置和肋骨延伸轨迹数据,所述第二声波探测器组32用于探测右侧的肋骨位置和肋骨延伸轨迹数据,在实现时,通过所述第一声波探测器组31和第二声波探测器组32所得到的探测数据主要为一维声波探测数据,经所述主控电路板5处理后,生成与人体肋骨位置和肋骨延伸轨迹相匹配的一维数据图像。
72.又因不同肋骨宽度自身的宽度不一样,不同肋骨之间的间距也不一样,为了使得所述声波探测阵列3在通过所述固定组件2完成与人体背部适配后,能一次将更多的声波探测数据反馈给所述主控电路板5,并能生成和得到二维数据,以便于所述主控电路板5根据所述声波探测的探测数据确定的出背部肋骨位置和肋骨延伸轨迹更为直观、准确和形象,在实施例1基础上,本实施例2提供了一种用于快速定位脊椎麻醉点位的装置,如图8所示,所述声波探测阵列3还包括第三声波探测器组33和第四声波探测器组34,所述第三声波探测器组33和所述第四声波探测器组34中分别包括有一定数量的声波探测器,且所述第三声波探测器组33和所述第四声波探测器组34中的声波探测器数量相同,并且,所述第三声波探测器组33和所述第四声波探测器组34声波探测器数量与所述第一声波探测器组31和所述第二声波探测器组32中声波探测器数量均相同,具体包括:所述第三声波探测器组33设置在所述第一声波探测器组31相差第一预设距离的并排位置;所述第四声波探测器组34设置在所述第二声波探测器组32相差第一预设距离的并排位置,所述第一预设距离,指代所述第三声波探测器组33在沿人体脊椎方向上与所述第一声波探测器组31沿人体脊椎方向上的两者之间的平行距离,具体实现时,所述主控电路板5根据所述第一声波探测器组31和所述第三声波探测器组33反馈的二维声波探测数据生成位于背部脊柱左侧的肋骨位置和肋骨延伸轨迹;所述主控电路板5根据所述第二声波探测器组32和所述第四声波探测器组34反馈的二维声波探测数据生成位于背部脊柱右侧的肋骨位置和肋骨延伸轨迹;所述主控电路板5根据所述左侧的肋骨位置和肋骨延伸轨迹数据,以及右侧的肋骨位置和肋骨延伸轨迹数据,模拟出背部脊柱中胸椎和腰椎的空间位置,在本实施例中,所述二维声波探测数
据,如图9所示,在具体实现方式中,像图8所示的由三个声波探测器单元构成的声波探测器组中,其中每一个声波探测器单元内部实际上会相对紧密的排列至少两个声波探测器,所述至少两个声波探测器构成一个声波探测器单元,所述至少两个声波探测器的排列方向也与人体脊柱延伸方向相同,在图9中,直接以一个声波探测单元中包含三个声波探测器为例进行阐述。类似图1所示的装置,即针对局部背部区域进行精准探测,因此,通常使用过程中会先打开装置,通过手动平移的方式由装置自身探测到预设位置后,提示医护人员完成病患背部位置的固定,最优的方式是从腰部往背部上移的方式来寻找上述预设位置,这个过程包含了装置中第一行声波探测模组首次探测到肋骨的情况,并通过第二行和/或第三行声波探测模组的肋骨检测来验证第一行的检测结果,最终抵达可覆盖麻醉脊柱位置的上述预设位置。而结合图9来看,相应的一个声波探测模组的声波探测器a1、声波探测器a2和声波探测器a3,会与相邻的声波探测模组中的声波探测器b1、声波探测器b2和声波探测器b3,以及下面的两行声波探测模组构成二维位探测面,在实际操作过程中,上述相应的声波探测模组上下距离,会根据小孩和成人进行区分,而一旦选定成人之后,类似图9中的a1到c3构成最大的相邻肋骨间距探测,而其中a3到c1由构成了最小的相邻肋骨间距探测,足以以一套装置覆盖成人之间各种肋骨大小情况。在图9中仅示出了中间过程,在以图9为示例的场景中,将装置移动到如图10所示的状态,即为上述的预设位置;此时,每一个声波探测模组都有效覆盖一条肋骨,从而能够勾勒出最准确的肋骨位置和轨迹。其中,在如图10所示的装置中,在完成预设位置布局之后,每次探测过程中声波探测模组都会以其中一个探测结果信号最强的声波传感器作为主传感器,另外两个作为辅助传感器,进行肋骨位置和肋骨轨迹的精细化分析,以图6中为例,a3会作为其所在声波探测模组的主传感器,而a1和a2会作为辅助传感器;另外,c2会作为其所在声波探测模组的主传感器,而c1和c3会作为辅助传感器。
73.实施例3:
74.为了快速和准确地找到人体脊椎麻醉点位的位置,基于与实施例1同一总的构思,本发明实施例3提供了一种用于快速定位脊椎麻醉点位的方法,该方法使用实施例1所述的用于快速定位脊椎麻醉点位的装置,如图11所示,方法包括:
75.步骤s101,获取目标麻醉点位的位置信息。
76.其中,所述目标麻醉点位的位置信息由所述声波探测阵列3将探测数据反馈给所述主控电路板5并由所述主控电路板5计算和还原得到。所述位置信息包括脊柱上背椎编号或腰椎编号。
77.步骤s102,启动装置中的所述第一声波探测器组31和所述第二声波探测器组32的声波探测功能。
78.其中,所述第一声波探测器组31和所述第二声波探测器组32分别包括有一定数量的声波探测器,且所述第一声波探测器组31和所述第二声波探测器组32中的声波探测器数量相同,每一声波探测器都会以广播的形式向人体方向发出超声波信号,所述第一声波探测器组31和所述第二声波探测器组32对称的分布在所述麻醉点位标记伺服组件4的两侧,所述第一声波探测器组31和所述第二声波探测器组32根据人体的肋骨位置和肋骨延伸轨迹的对称性来设置。
79.步骤s103,所述主控电路板5根据所述第一声波探测器组31和所述第二声波探测
器组32的声波探测数据确定当前装置放置到病患预设的固定区域时,提醒操作人员通过所述固定组件2完成装置与病患适配。
80.其中,在装置通过所述固定组件2完成装置与病患适配之前,所述第一声波探测器组31和所述第二声波探测器组32的声波探测数据为参考数据,所述参考数据经所述主控电路板5处理后,用于操作人员通过所述固定组件2完成装置与病患适配之后。
81.在本发明实施例中,适配安装前需要先有操作人员在病患背部一定范围区间进行动态平移(包括上下移动和左右移动),因为仅采用了左右各一列的声波探测器组,因此,需要预先通过动态平移操作,实现对背部大体肋骨分布进行扫描,从而,对用户预先导入的麻醉位置进行适配位置(即上述的预设的固定区域)固定。
82.其动态平移方式,最优的一种,是双收把持住本发明装置,从腰部往背部方向平移,当第一声波探测器组31和所述第二声波探测器组32中各自位于最上方的探测器,最先检测到肋骨时,尤其内部的如图9所示的,连续的声波探测器a1检测到,声波探测器a2验证确认后,并根据预先输入的目标麻醉位置,确认当前的麻醉点位标记伺服组件4的移动位置空间可以覆盖相应目标麻醉点位,即通知操作人员完成吸附(例如,通过装置上的指示灯或者操作面板提示方式完成通知操作)。在具体实现过程中,第一声波探测器组31和所述第二声波探测器组32中相应声波探测器单元的数量,其实是和想覆盖的脊柱麻醉点范围相关联和装置安装便捷程度关联起来,其中,麻醉点范围越大,相应安装便捷和准确程度要求越高,则相应的声波探测器单元的数量也会相对布局多些。而实际实现过程中,相应装置并不一定严格按照各结构图所示的设计成方形,而是可以对滑轨做上下方位的拓展,即装置轮廓形成一个汉字的“中”形态,从而将有限的声波探测模拟出来的脊柱,充分利用到标记结果中去。
83.步骤s104,在装置完成适配固定后,所述主控电路板5根据所述第一声波探测器组31和所述第二声波探测器组32新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置。
84.其中,在装置通过所述固定组件2完成装置与病患适配之后,所述第一声波探测器组31和所述第二声波探测器组32的声波探测数据为新数据,所述新数据经所述主控电路板5处理后,用于模拟出背部脊柱中胸椎和腰椎的空间位置。
85.步骤s105,所述主控电路根据所述模拟出背部脊柱中胸椎和腰椎的空间位置,控制麻醉点位标记伺服组件4抵达目标麻醉点位的位置后完成标记。
86.为了获得多组声波探测数据,并根据相应多组声波探测数据模拟出背部脊柱中胸椎和腰椎的空间位置,所述第一声波探测器组31和所述第二声波探测器组32中每一声波探测器还能在一定范围内活动,作为一种优选的是实现方式,所述第一声波探测器组31和第二声波探测器组32在所述壳体1上分别拥有各自的横向滑轨,其中,所述横向滑轨的开设方式与所述滑槽41开设方式一致,所述横向滑轨开设方向与所述直槽口46开设方向一致,则所述主控电路板5根据所述第一声波探测器组31和第二声波探测器组32新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置,每滑动所述第一声波探测器组31和第二声波探测器组32中任意一个声波探测器,相当于会得到一组新的声波探测数据,不停移动任意一个声波探测器的过程中,进而可以得到多组声波探测数据,具体包括:所述主控电路板5通过控制所述第一声波探测器组31和所述第二声波探测器组32在所述壳体1上的横向
移动,采集到多组声波探测数据,并根据相应多组声波探测数据模拟出背部脊柱中胸椎和腰椎的空间位置。
87.实施例4:
88.为了快速和准确地找到人体脊椎麻醉点位的位置,基于与实施例2同一总的构思,本发明实施例4提供了一种用于快速定位脊椎麻醉点位的方法,该方法使用实施例2所述的用于快速定位脊椎麻醉点位的装置,如图12所示,方法包括:
89.步骤s201,获取目标麻醉点位的位置信息。
90.步骤s202,启动装置中的所述第一声波探测器组31、所述第二声波探测器组32、所述第三声波探测器组33和所述第四声波探测器组34的声波探测功能。
91.其中,所述第三声波探测器组33设置在所述第一声波探测器组31相差第一预设距离的并排位置;所述第四声波探测器组34设置在所述第二声波探测器组32相差第一预设距离的并排位置。
92.所述第三声波探测器组33和所述第四声波探测器组34中分别包括有一定数量的声波探测器,且所述第三声波探测器组33和所述第四声波探测器组34中的声波探测器数量相同,并且,所述第三声波探测器组33和所述第四声波探测器组34声波探测器数量与所述第一声波探测器组31和所述第二声波探测器组32中声波探测器数量均相同。
93.步骤s203,在装置完成适配固定后,所述主控电路板5根据所述第一声波探测器组31、所述第二声波探测器组32、第三声波探测器组33和所述第四声波探测器组34新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置。
94.与实施例3中需要先进行步骤s103中,适配安装前需要先有操作人员在病患背部一定范围区间进行动态平移不同,本发明实施例4中因为在单侧就通过第一声波探测器组31和第三声波探测器组33个构成了二位扫描结构,因此,可以自主的根据声波探测数据生成胸椎和腰椎的空间位置;而实施例3中因为仅采用了左右各一列的声波探测器组,因此,需要预先通过动态平移操作,实现对背部大体肋骨分布进行扫描,从而,对用户预先导入的麻醉位置进行适配位置固定。
95.步骤s204,所述主控电路根据所述模拟出背部脊柱中胸椎和腰椎的空间位置,控制麻醉点位标记伺服组件4抵达目标麻醉点位的位置后完成标记。
96.作为本发明实施例实现的更优方案,还提出了以下改进点,作为结合方案实现:
97.如图5所示,所述麻醉点位标记伺服组件4上还设置有声波探测器410,并且,所述声波探测器设置在滑块42上(若其数量为一个,则更优的是设置在滑块42的中间位置),用于在滑块42移动过程中通过所述声波探测器实现对背椎或脊椎的间隙探测,最终精准定位在目标麻醉点位。而相应的方法执行过程,可以是在步骤s203中同步执行,即相应步骤s203在结合上述扩展方案内容后,具体表现为步骤s203’:
98.在步骤s203’中,在装置完成适配固定后,所述主控电路板5根据所述第一声波探测器组31、所述第二声波探测器组32、第三声波探测器组33和所述第四声波探测器组34新反馈的声波探测数据,模拟出背部脊柱中胸椎和腰椎的空间位置,并通过麻醉点位标记伺服组件4上还设置有声波探测器对相应的模拟出的背部脊柱中胸椎和腰椎的空间位置进行验证和校准。
99.而相应的在步骤s204中执行的依据内容,就是上述完成验证和校准之后的模拟出
的背部脊柱中胸椎和腰椎的空间位置。
100.实施例5:
101.为了快速和准确地找到人体脊椎麻醉点位的位置,基于实施例1、实施例2和实施例4同一总的构思,在实施例1、实施例2和实施例4基础上,本发明实施例5提供了一种用于快速定位脊椎麻醉点位的方法,如图13所示,还包括第五声波探测器组35和第六声波探测器组36,所述第五声波探测器组35和所述第六声波探测器组36分别设置在所述第三声波探测器组33和所述第四声波探测器组34一侧;具体的设置时,所述第五声波探测器组35和所述第六声波探测器组36中分别包括有一定数量的声波探测器,且所述第五声波探测器组35和所述第六声波探测器组36中的声波探测器数量相同,并且,所述第五声波探测器组35和所述第六声波探测器组36声波探测器数量与所述第一声波探测器组31、所述第二声波探测器组32、所述第三声波探测器组33、所述第四声波探测器组34中声波探测器数量均相同,从而由所述第一声波探测器组31、所述第三声波探测器组33和所述第五声波探测器组35排列构成的对左侧肋骨位置和肋骨延伸轨迹的声波探测数据采集;以及,由所述第二声波探测器组32、所述第四声波探测器组34和所述第六声波探测器36组排列构成的对左侧肋骨位置和肋骨延伸轨迹的声波探测数据采集;最终模拟出背部脊柱中胸椎和腰椎的空间位置,在本实施例中,为了所述主控电路板5根据所述声波探测的探测数据确定的出背部肋骨位置和肋骨延伸轨迹更为直观、准确和形象,并能生成和得到三维数据,具体实现时,可将所述第五声波探测器组35和所述第六声波探测器组36分别安装在所述壳体1的两侧沿人体背部肋骨延伸方向设置的弧面上。
102.在上面如图1所示装置,以及配套实施例3实现方案中,以及相应改进装置结构,以及配套实施例4中其实都隐藏了一个优选条件,即相应的医务人员需要对准装置的中心线和脊柱的中心线;虽然,这个要求更多的是在采用不取下装置就进行麻醉的使用方式中要求,而对于取下装置后依照标注点进行麻醉方式中,因为麻醉师能够依赖辅助按压最终精准到位对上述的“医务人员需要对准装置的中心线和脊柱的中心线”依赖性就小的多,甚至于无需达到这么精准的安装要求也能解决现有技术问题,因为此时靠所述标注笔45点出来的位置已经足够准确。
103.为了克服上面的隐藏优选条件的约束,在上述实施例中也给出了相应的声波探测阵列可移动的解决方案,但是其毕竟会带来检测效率上的降低,因为,声波探测阵列在移动过程中,是需要声波传感器探测暂停的,这就会带来整体检测效率上的降低。但是,回过头来说,其的确可以弥补在声波探测阵列数量不足以完成准确的肋骨轨迹还原时候,如何形成精准的肋骨估计生成目的。有了此改进方案后,上述的隐藏的优选条件,也就成了真正意义上的可选条件了,即不满足照样可以达到精准模拟肋骨轨迹,并达到麻醉点精准标注的目的。
104.而本实施例,则是通过两侧分别设置三套声波探测阵列,真正达到了肋骨二维轮廓,其延伸角度的精确探测,从而能够生成更为准确的肋骨形态,从而实现了标注点的精确性。
105.综上所述,本发明提供一种用于快速定位脊椎麻醉点位的方法和装置,能客观和准确地确定脊椎麻醉点位,整个定位过程耗时短、费用低,能大大节省病患的就医时间和费用,提升了医疗的效率,进而提升病患的就医满意度。
106.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。