1.本发明涉及水产养殖技术领域,尤其是涉及一种龙虾养殖自动投饲机。
背景技术:
2.随着中国工厂化水产养殖业的迅猛发展,养殖系统规模持续扩大,投饲是对虾养殖业中必不可少的环节,也是消耗人力最重要的因素。人工投喂或是简单的投饲设备已经成了产业发展的瓶颈,严重限制了行业发展。国内虾塘养殖饲料投喂量和投喂时间基本上是根据养殖户个人经验确定的。
3.目前鱼类养殖采取定点投喂方式。但由于对虾的生活习性与鱼类不同,一般均匀分布在整个池塘,经常在池塘岸边觅食,所以,需要将饲料投放在池塘四周或全池均匀抛撒,故而传统的鱼类投料设备不能满足对虾的投喂,由于缺少专门的投饲设备,目前的虾塘饲料由人工投喂,这种投喂方法耗时费力,且难以做到投饲均匀,饲料利用率较低,同时残余饲料还会导致水质恶化,增加养殖风险。随着劳动力的价格不断上升,养殖成本增加,投饲环节已成为对虾养殖业发展的一个限制因素。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出了龙虾养殖自动投饲机。
5.根据本发明第一方面实施例的龙虾养殖自动投饲机,包括:
6.船体;
7.推进装置,其安装在船体底部,用于推进船体前进;
8.投饲装置,其固定安装在所述船体上部,所述投饲装置包括进料装置、称重装置、第一电机、机架、仿蹄形落料口、抛料装置、第二电机和壳体,其中所述进料装置安装在所述壳体上部,所述壳体一侧固定安装有第一电机,用于驱动进料装置供料,所述壳体内安装有机架,所述机架上安装有称重装置和仿蹄形落料口,所述称重装置与进料装置的落料口和仿蹄形落料口位于同一竖轴线上,用于将进料装置落下的饲料进行称重并控制落料均匀,所述仿蹄形落料口下方安装有抛料装置,所述抛料装置通过壳体内的第二电机驱动;
9.料箱,其固定安装在所述投饲装置上部,与进料装置相连通;
10.控制器,其固定安装在所述投饲装置内部,所述控制器与称重装置电连接,所述控制器输出端与第一电机电连接,所述控制器输出端与第二电机电连接。
11.根据本发明实施例的龙虾养殖自动投饲机,摒弃传统的定点投喂方式,通过船体、推进装置、投饲装置、料箱以及控制器组合搭配,采用池塘中自动行进式自动投饲,提高投饲精度和饲料利用率,降低劳动强度,减少劳动力成本,从而降低了对虾的养殖成本。
12.根据本发明的一些实施例,所述进料装置包括运输管道、落料口、螺旋叶片、入料口和螺旋轴,所述运输管道安装在所述壳体上部,所述运输管道一侧底部设有落料口,另一侧上部设有入料口,所述入料口与料箱连通,所述螺旋轴一端穿过所述运输管道与第一电
机输出轴联接,另一端与壳体内壁的活动块转动连接,位于运输管道内的螺旋轴上安装有螺旋叶片,便于将料箱中饲料均匀进料,防止进料堵塞。
13.根据本发明的一些实施例,所述称重装置包括称重盒、称重传感器、称重料门、第一方钢、曲柄、连杆和摇杆,所述第一方钢焊接在所述机架上,称重传感器固定安装在所述第一方钢上,所述称重盒安装在所述称重传感器上,所述称重盒底部活动连接有两扇称重料门,其中一扇称重料门与曲柄呈90
°
夹角固定连接,所述摇杆与另一扇称重料门呈90
°
夹角固定连接,所述称重料门一侧安装有微型电机,所述微型电机与控制器输出端电连接,用于驱动曲柄转动,所述曲柄与摇杆通过连杆连接,当称重盒内饲料质量达到预设数值时,控制器驱动微型电机工作,从而带动曲柄转动,在连杆的作用下带动摇杆转动,实现两扇称重料门同时开启和关闭。
14.根据本发明的一些实施例,仿蹄形落料口通过螺栓固定在称重盒下方的第二方钢上,第二方钢焊接在所述机架上,便于平稳承接称重盒落下的饲料,方便抛料装置进行抛料。
15.根据本发明的一些实施例,所述抛料装置包括抛料叶片、抛料盘和转轴,所述抛料盘固定在转轴上,所述转轴与第二电机输出轴联接,所述抛料盘上均匀分布有若干根抛料叶片,用于对饲料进行均匀抛料。
16.根据本发明的一些实施例,所述第一电机和第二电机上均设有电机驱动器,所述第一电机与电机驱动器电连接后接入控制器输出端,所述第二电机与电机驱动器电连接后接入控制器输出端。
17.根据本发明的一些实施例,所述推进装置为电动螺旋推进器,所述电动螺旋推进器采用三叶螺旋驱动方式,可加强推进动力,提高船体的行进速度。
18.根据本发明的一些实施例,所述控制器选用stm32单片机作为主控单元,与用户控制面板通过rs485串口连接。
19.根据本发明的一些实施例,所述船体为双船体结构,双船体通过平台板固定连接,投饲装置交替错开安装在所述平台板上。
20.根据本发明第二方面实施例的抛料装置结构优化方法,其特征在于,采用该方法优化的抛料装置应用于上述的龙虾养殖自动投饲机,包括如下步骤:
21.步骤s1:构建抛料装置结构模型,所述抛料装置结构模型包括抛料叶片、抛料盘和转轴,分别定义抛料盘直径φ、拨料叶片数量n、拨料叶片偏置角α以及抛料盘倾角β;
22.步骤s2:输入抛料盘直径φ、拨料叶片数量n、拨料叶片偏置角α以及抛料盘倾角β作为抛料装置结构模型的四要素输入因素;
23.步骤s3:利用四要素输入因素搭建四元二次回归正交旋转组合试验,在离散元仿真软件中进行仿真分析;
24.步骤s4:将离散元仿真软件仿真分析得到横向幅宽方向撒料分布变异系数cv作为撒肥均匀性试验指标,横向分布变异系数cv越小,说明抛洒越均匀;
25.步骤s5:判断横向幅宽方向撒料分布变异系数是否符合抛洒均匀标准,若不符合则跳转至步骤s2,若符合则跳转至步骤s6;
26.步骤s6:抛料装置结构优化过程结束,得到符合抛洒均匀标准的抛料装置。
27.根据本发明实施例的抛料装置结构优化方法,专门为龙虾养殖自动投饲机设计出
符合抛洒均匀标准的抛料装置,使得整个龙虾养殖自动投饲机达到抛洒范围广且抛洒均匀的效果,提高了龙虾养殖生产效率。
28.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
29.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
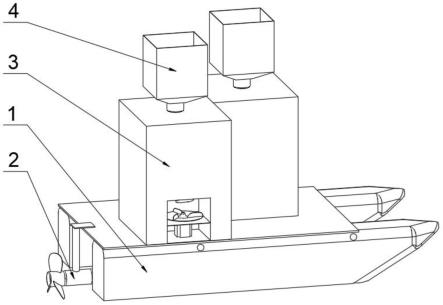
30.图1所示为本发明的龙虾养殖自动投饲机的整体结构示意图;
31.图2所示为本发明的投饲装置结构示意图;
32.图3所示为本发明的进料装置结构示意图;
33.图4所示为本发明的称重装置结构示意图;
34.图5所示为本发明的仿蹄形落料口结构示意图;
35.图6所示为本发明的仿蹄形落料口另一视角示意图;
36.图7所示为本发明的抛料装置结构示意图;
37.图8所示为本发明的抛料装置结构优化方法流程图;
38.图9所示为本发明的抛料装置的抛料盘直径φ和抛料盘倾角β示意图;
39.图10所示为本发明的抛料装置的拨料叶片偏置角α示意图。
40.附图标记:
41.1、龙虾养殖自动投饲机;2、推进装置;3、投饲装置;4、料箱;
42.31、进料装置;32、称重装置;33、第一电机;34、机架;35、仿蹄形落料口;36、抛料装置;37、第二电机;38、壳体;
43.311、运输管道;312、落料口;313、螺旋叶片;314、入料口;315、螺旋轴;321、称重盒;322、称重传感器;323、称重料门;324、第一方钢;325、曲柄;326、连杆;327、摇杆;
44.350、第二方钢;
45.361、抛料叶片;362、抛料盘;363、转轴。
具体实施方式
46.下面详细描述本发明的实施例,参考附图描述的实施例是示例性的,应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
47.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
48.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
49.实施例1
50.参阅图1-图6所示,本实施例提供一种龙虾养殖自动投饲机,其中包括船体1、推进装置2、投饲装置3、进料装置31、称重装置32、第一电机33、机架34、仿蹄形落料口35、抛料装置36、第二电机37、壳体38和料箱4,其中,推进装置2安装在船体1底部,用于推进船体1前进,船体1为双船体结构,双船体通过平台板固定连接,投饲装置3交替错开安装在平台板上,投饲装置3包括进料装置31、称重装置32、第一电机33、机架34、仿蹄形落料口35、抛料装置36、第二电机37和壳体38,其中进料装置31安装在壳体38上部,壳体38一侧固定安装有第一电机33,用于驱动进料装置31供料,壳体38内安装有机架34,机架34上安装有称重装置32和仿蹄形落料口35,称重装置32与进料装置31的落料口和仿蹄形落料口35位于同一竖轴线上,用于将进料装置31落下的饲料进行称重并控制落料均匀,仿蹄形落料口35下方安装有抛料装置36,抛料装置36通过壳体38内的第二电机37驱动;料箱4固定安装在投饲装置3上部,与进料装置3相连通;控制器固定安装在投饲装置3内部,控制器与称重装置32电连接,控制器输出端与第一电机33电连接,控制器输出端与第二电机37电连接,本实施例摒弃传统的定点投喂方式,通过船体、推进装置、投饲装置、料箱以及控制器组合搭配,采用池塘中自动行进式自动投饲,提高投饲精度和饲料利用率,降低劳动强度,减少劳动力成本,从而降低了对虾的养殖成本。
51.具体地,在本实施例中,进料装置31包括运输管道311、落料口312、螺旋叶片313、入料口314和螺旋轴315,运输管道311安装在壳体38上部,运输管道311一侧底部设有落料口312,另一侧上部设有入料口314,入料口314与料箱4连通,螺旋轴315一端穿过运输管道311与第一电机33输出轴联接,另一端与壳体38内壁的活动块转动连接,位于运输管道311内的螺旋轴315上安装有螺旋叶片313(如图3所示)。
52.具体地,在本实施例中,仿蹄形落料口35通过螺栓固定在称重盒321下方的第二方钢350上,第二方钢350焊接在机架34上,便于平稳承接称重盒321落下的饲料,方便抛料装置36进行抛料(参阅图5和图6所示)。
53.具体地,在本实施例中,抛料装置36包括抛料叶片361、抛料盘362和转轴363,抛料盘362固定在转轴363上,转轴363与第二电机37输出轴联接,抛料盘362上均匀分布有若干根抛料叶片361,用于对饲料进行均匀抛料(参阅图7所示)。
54.具体地,在本实施例中,第一电机33和第二电机37上均设有电机驱动器,第一电机33与电机驱动器电连接后接入控制器输出端,第二电机37与电机驱动器电连接后接入控制器输出端。
55.实施例2
56.参阅图4,本实施例在实施例1的基础上,所述称重装置32包括称重盒321、称重传感器322、称重料门323、第一方钢324、曲柄325、连杆326和摇杆327,所述第一方钢324焊接在所述机架34上,称重传感器322固定安装在所述第一方钢324上,所述称重盒321安装在所述称重传感器322上,所述称重盒321底部活动连接有两扇称重料门323,其中一扇称重料门323与曲柄325呈90
°
夹角固定连接,所述摇杆327与另一扇称重料门323呈90
°
夹角固定连接,所述称重料门323一侧安装有微型电机,所述微型电机与控制器输出端电连接,用于驱动曲柄325转动,所述曲柄325与摇杆327通过连杆326连接,通过称重传感器322检测称重盒321所受压力并将其转换为质量,当称重盒321内饲料质量达到预设数值时,控制器驱动微型电机工作,从而带动曲柄325转动,在连杆326的作用下带动摇杆327转动,实现两扇称重
料门同时开启和关闭。
57.实施例3
58.参阅图1,本实施例在上述实施例基础上做出进一步改进,推进装置2为电动螺旋推进器,电动螺旋推进器采用三叶螺旋驱动方式,可加强推进动力,提高船体1的行进速度。
59.具体地,在本实施例中,控制器选用stm32单片机作为主控单元,与用户控制面板通过rs485串口连接。
60.实施例4
61.基于上述实施例,本实施例提供一种龙虾养殖自动投饲方法,包括如下步骤:
62.步骤一:龙虾养殖自动投饲机上电运作后,进料装置31开始工作,料箱4内部储存的饲料从入料口314进入螺旋输送器,在螺旋叶片313带动下较为均匀的从落料口312落下,并平缓落入称重盒321内部。
63.步骤二:当称重盒321内部饲料重量达到一定预设值后,通过微型电机驱动曲柄325转动带动一侧称重料门323打开,在连杆326的作用下带动摇杆327转动,实现两扇称重料门同时开启。
64.步骤三:饲料从称重盒321内落下,经过仿蹄形落料口35减速平缓落入抛料盘362上,抛料盘362通过高速旋转产生的离心力将饲料均匀抛洒出。
65.步骤四:通过遥控控制船体行进,船体1两侧设有距离传感器,可辅助纠正船体1行进方向,避免偏航撞击障碍物。
66.实施例5
67.参阅图8,本实施例提供一种抛料装置结构优化方法,采用该方法优化的抛料装置应用于上述实施例中的龙虾养殖自动投饲机,包括如下步骤:
68.步骤s1:构建抛料装置结构模型,所述抛料装置结构模型包括抛料叶片、抛料盘和转轴363,分别定义抛料盘直径φ、拨料叶片数量n、拨料叶片偏置角α以及抛料盘倾角β,其中拨料叶片偏置角α为拨料叶片与抛料盘之间的夹角;
69.步骤s2:输入抛料盘直径φ、拨料叶片数量n、拨料叶片偏置角α以及抛料盘倾角β作为抛料装置结构模型的四要素输入因素;
70.步骤s3:利用四要素输入因素搭建四元二次回归正交旋转组合试验,在离散元仿真软件中进行仿真分析;
71.步骤s4:将离散元仿真软件仿真分析得到横向幅宽方向撒料分布变异系数cv作为撒肥均匀性试验指标,横向分布变异系数cv越小,说明抛洒越均匀;
72.步骤s5:判断横向幅宽方向撒料分布变异系数是否符合抛洒均匀标准,若不符合则跳转至步骤s2,若符合则跳转至步骤s6;
73.步骤s6:抛料装置结构优化过程结束,得到符合抛洒均匀标准的抛料装置。根据本发明实施例的抛料装置结构优化方法,专门为龙虾养殖自动投饲机设计出符合抛洒均匀标准的抛料装置,使得整个龙虾养殖自动投饲机达到抛洒范围广且抛洒均匀的效果,提高了龙虾养殖生产效率。
74.实施例6
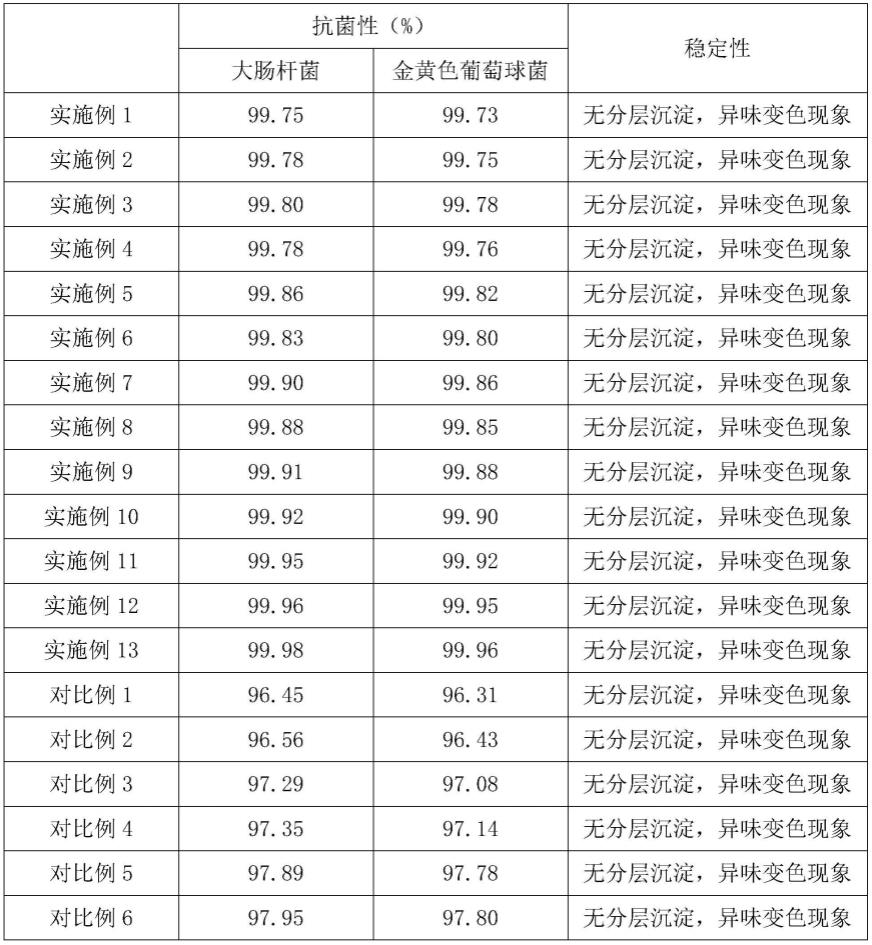
75.参阅图9和图10,在实施例5的基础上,本实施例提供一种抛料装置结构,其具体参数见表一;
76.表一、抛料装置关键参数
77.序号名称参数1抛料盘直径φ225mm2拨料叶片数量n3片3拨料叶片偏置角α45
°
4抛料转盘倾角β4
°
5横向分布变异系数cv21.36%
78.经多次测试总结,包含本实施例抛料装置结构的龙虾养殖自动投饲机在抛洒饲料时的抛洒范围十分广泛且抛洒十分均匀,达到极佳效果。
79.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
80.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
81.显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或者特性可以包含在本实施例申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是相同的实施例,也不是与其它实施例互斥的独立的或是备选的实施例。本领域技术人员可以显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
82.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。