1.本发明涉及一种基于群体分配的多未知目标定位方法,属于多旋翼无人机与大气环境监测领域。
背景技术:
2.作为我国经济发展的重要支撑,工业发展对经济的影响显而易见,但随之而来的环境污染问题也在不断突出。当前,大气环境污染相关问题时有发生,如工业生产过程中污染气体排放产生的异常气味,时常引起居民的不满情绪和投诉,有毒有害气体泄漏事故的发生,会对人体健康造成极大危害。因此,把未知污染源作为溯源目标,精准和快速地定位污染源的位置,对实现大气污染的靶向治理和制定有效的应急处置方案具有重要意义。传统的气体泄漏源定位方法主要包括固定传感器网络监测法和生物检测法,固定传感器网络监测法只能对固定的区域进行监测,需提前在有可能发生污染源泄漏的区域布设传感器网络,难以应对突发性的污染源泄漏,并且越大的监测范围需要越多的传感器,成本也会相应增加。而生物检测法对进入污染现场的专业人员存在着一定的危险性,由动物进入现场完成任务,需要提前花费较长时间对动物进行训练,并且随着污染源搜索过程的进行,动物的注意力和体力都会有所下降,难以完成搜索任务。当前,无人机在环境领域的应用正处于高速发展阶段,无人机有着成本低、搜索范围广和灵活性强等优点,以无人机作为大气污染源定位平台,可以扩大溯源的范围,提高溯源的效率。
3.在专利“一种基于改进海鸥算法的多无人机气体泄漏源定位方法”(公告号:cn114279636a)中,针对单污染源定位,提出了一种基于改进海鸥算法的多无人机气体泄漏源定位方法,而在实际环境中,多个污染源同时泄漏的情况也时有发生。目前,针对多个大气污染源进行定位的方法较少。
4.针对当前日益严重的环境污染问题以及现有气体泄漏源定位方法的局限性,本发明要解决的技术问题是“基于群体分配的多未知目标定位问题”。
技术实现要素:
5.本发明的目的是为了弥补现有气体污染源定位技术的不足,提出了一种基于群体分配的多未知目标定位方法,将大气污染物溯源领域的单目标定位问题拓展到多目标定位问题上,在改进海鸥算法的基础上,使用群体分配策略进行多个体的组形成、限制组大小、组合并和组拆解操作。该方法具有全局搜索能力强、收敛性强和不易陷入局部最优等优点,可以快速、高效地定位多个泄漏源。针对多未知目标定位问题,本发明提出一种群体分配策略。首先,本发明考虑一个由n个无人机ri(i=1...n)组成的系统,该系统配备有传感器,用于测量羽流浓度和风向,并在无障碍空间中移动。假设无人机具有气味感知、定位、通信和在搜索空间内移动的能力。有m个气味源sj(j=1...m)被放置在搜索空间中的随机位置。这些气味源通过释放一些化学物质来扩散气味羽流。通过一种基于群体分配的多未知目标定位方法来实现由n个无人机组成的团队快速跟踪定位到m个气体源。
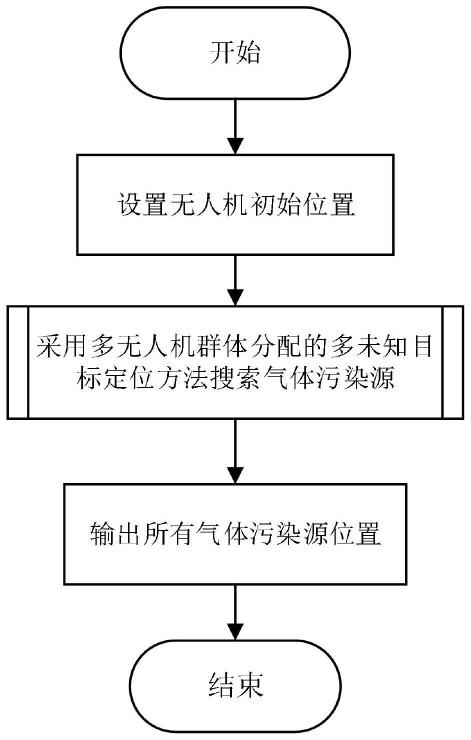
6.一种基于群体分配的多未知目标定位方法,流程如图1所示,包括以下步骤:
7.步骤1:在待监测区设定n架无人机ri(i=1...n),在待监测区存在m个气味源sj(j=1...m);
8.步骤2:初始化设定,即设定无人机的初始位置;
9.步骤3:采用多无人机群体分配的多未知目标定位方法搜索气体污染源;
10.步骤4:输出所有气体污染源位置。
11.所述步骤3中提出的多无人机群体分配的多未知目标定位方法,流程如图2所示,包括以下步骤:
12.步骤1:初始化参数设定,位于羽流附近的阈值thr、气体源定位成功的阈值thg;
13.步骤2:计算初始无人机群各个体的适应值;
14.步骤3:判断无人机个体ri的适应度值是否超过阈值thr,若超过,则执行步骤4,否则,执行步骤5;
15.步骤4:采用组方法进行多未知污染源搜索;
16.步骤5:无人机进行随机搜索;
17.步骤6:判断无人机个体ri适应度值是否超过阈值thg,若超过,则执行步骤7,否则,回到步骤2;
18.步骤7:发现一个气体源,进而判断无人机ri是否属于组,若属于则进行组解散,否则确定无人机ri未分配组;
19.步骤8:判断是否所有的气体源都定位成功,若成功,则结束,否则,回到步骤2。
20.多无人机群体分配的多未知目标定位方法所述步骤2中适应度值计算公式为:
21.fiti=ci22.其中,ci为无人机ri测得的气体浓度值。
23.多无人机群体分配的多未知目标定位方法所述步骤4中提出的组方法,流程如图3所示,包括以下步骤:
24.步骤1:采用组形成方法形成组;
25.进一步的,组形成方法为:
26.一个或多个无人机可以同时进入羽流附近区域,在羽流附近区域的无人机开始发出信号,这些信号由产生信号的无人机的半径范围gr内的其他无人机接收,无人机可以同时接收多个信号。在这种情况下,无人机比较其接收的信号强度,并加入其接收最强信号的组。信号强度取决于无人机的适应度值和距离,计算公式如下:
[0027]vij
=fiti·
exp(-d
ij
)
[0028]
其中v
ij
是由无人机ri,在半径gr内产生并由无人机rj接收到的信号,fiti是无人机ri的适应度值,d
ij
是无人机ri和rj之间的距离,使用信号强度方程组形成的方式同时考虑了距离和适应度,有助于无人机在同时接收多个信号时决定应加入哪个组。
[0029]
步骤2:判断组的大小是否大于g
maxsize
,若大于,则需进行限制组大小操作后执行步骤3,否则直接执行步骤3;
[0030]
进一步的,定义了参数g
maxsize
,以限制组中无人机的最大数量,这有助于实现更好的资源利用率。随着无人机数量的增加,组的大小也增加,但是气体源数量的增加将导致群体规模的减小,因此寻找额外气体源所需的无人机数量也应增加。考虑到这一点,定义了限
制组大小的函数,函数如下:
[0031][0032]
wm=|0.5-(1/(exp(m)))|
[0033]
其中,n是无人机总数,m是气体源数量,λ是常数,当形成一个组时,如果形成的组的大小大于g
maxsize
,则将从该组中删除p个性能最差的无人机,p的计算公式如下:
[0034]
p=gk
size-g
maxsize
[0035]
其中,gk
size
是组gk的大小,p是从组gk中移除的无人机的数量;
[0036]
步骤3:用改进海鸥算法更新组中无人机的位置;
[0037]
进一步的,所述步骤3中的改进海鸥算法,流程如图4所示,包括以下步骤:
[0038]
步骤1:初始化设定,包括种群数量popsize、解空间的维数d、算法最大迭代次数t、变量fc、最大尝试次数try_number、最大移动步长step、种群初始位置;
[0039]
步骤2:计算初始种群各个体的适应度值,得到当前最优个体的位置p
bs
(t);
[0040]
步骤3:根据改进海鸥算法中的迁徙行为进行全局搜索,利用当前最优个体的位置p
bs
(t)得到海鸥的新位置ds(t);
[0041]
步骤4:根据改进海鸥算法中的攻击行为进行局部搜索,利用海鸥的新位置ds(t)得到海鸥的攻击位置ps(t);
[0042]
步骤5:根据加入的觅食行为,利用海鸥的攻击位置ps(t)、最大尝试次数try_number和最大移动步长step更新海鸥的位置ls(t)和污染气体浓度值y(t);
[0043]
步骤6:判断是否达到迭代次数,若达到迭代次数转到步骤7,否则返回步骤2;
[0044]
步骤7:输出寻优结果,算法结束。
[0045]
进一步的,所述步骤3中的迁徙行为用以下计算公式实现:
[0046]ds
(t)=|cs(t) ms(t)|
[0047]
其中,cs(t)=α
×
ps(t),cs(t)表示不与其他海鸥存在位置冲突的新位置,α表示海鸥在给定搜索空间中的运动行为,α1、α2为权重系数,为当前海鸥的适应度值,fit
p
为目标定位成功的阈值,t表示当前迭代次数,α的值随着和t的增大线性降低,ps(t)表示海鸥当前位置,ms(t)=b
×
(p
bs
(t)-ps(t)),ms(t)表示最佳位置所在的方向,b是负责平衡全局和局部搜索的随机数,b=0.5
×
rd,rd是[0,1]范围内的随机数。
[0048]
所述步骤4中的攻击行为用以下计算公式实现:
[0049]
ps(t)=ds(t)
×
x
×y×
z p
bs
(t)
[0050]
其中,x=r
×
cos(θ),y=r
×
sin(θ),z=r
×
θ,xyz表示海鸥攻击猎物时,在空中进行的螺旋形状运动,θ是[0,2π]范围内的随机角度值,r是每个螺旋的半径。
[0051]
所述步骤5中的觅食行为用以下计算公式实现:
[0052]
ls(t)=ps(t) rand
×
step
[0053]
其中,rand为[-1,1]范围内的随机数,step为最大移动步长,海鸥在以ps(t)位置为圆心,step为半径的圆内选取一个比当前位置食物浓度高的位置进行觅食行为,即污染
气体浓度值y
ls
(t)》y
ps
(t),则取y(t)=y
ls
(t)。
[0054]
步骤4:判断是否达到组合并条件,若达到,则需进行组合并操作后再输出,否则直接输出;
[0055]
进一步的,组合并方法为:
[0056]
在羽流跟踪期间,多个无人机组可能朝着同一气味源搜索,导致性能下降和局部冗余覆盖,为了避免这个问题,本发明使用组合并方法,采用侧风距离cd和顺风距离td的测量方法,即两个无人机组中表现最佳的无人机之间y方向和x方向的距离。如果两组之间的侧风距离小于其半径之和,且顺风距离小于顺风合并阈值,则合并两组,该数学表达式如下:
[0057]cd
(y
gk-y
gl
)<(r
gk
r
gl
)
[0058]
td(x
gk-x
gl
)<lc[0059]
其中,cd、td是组gk和组gl中表现最佳的无人机之间的侧风距离和顺风距离,y
gk
、y
gl
分别属于组gk和组gl的全局最佳无人机的y位置坐标,x
gk
、x
gl
分别属于组gk和组gl的全局最佳无人机的x位置坐标,r
gk
和r
gl
分别是组gk和组gl的半径,lc为顺风合并阈值。
[0060]
多无人机群体分配的多未知目标定位方法所述步骤7中组解散方法为:如果一个组找到气体源,则该组解散,该组的成员就分布在其他组中。在分布过程中,重要的是在羽流发现和羽流跟踪阶段的无人机数量之间保持平衡。为此,定义了阈值th
p
,并由以下等式给出:
[0061][0062]
其中,β为常数,population
size
为组的大小;将其他组的无人机数量与阈值th
p
进行比较,若该数量小于阈值th
p
,则无人机根据每个组的效益加入其他组。组的效益是根据组的需求和加入该组的成本来定义的。组的效益为:
[0063]ugk
=need
gk-cost
[0064]
need
gk
=exp(-(w5)
·
(fit
gk
) (w6)
·
(nm))
[0065]
cost=d(|x
gk-xj|)
[0066]
其中,need
gk
为组的需求,cost为加入该组的成本,fit
gk
为组gk表现最好的无人机的适应度值,nm为该组中成员的数量,w5和w6是权重系数,d是欧几里德距离函数,x
gk
是组中表现最好的无人机的位置,xj是无人机rj即属于解散组的位置。解散组中每个未分配的无人机计算每个组的效益,并加入效益最高的组。重复上述计算程序,直到解散组中没有无人机未分配。
[0067]
本发明的有益效果在于:
[0068]
本发明创新性地将多无人机群体分配与改进海鸥算法结合,提出了一种基于群体分配的多未知目标定位方法,该方法具有定位精度高、收敛性强、且能避免陷入局部最优等特点,可以快速、高效地实现对多气体污染源的定位。
[0069]
在群体分配中包括组形成、限制组大小、组合并、组解散操作,考虑组形成操作可以使无人机群形成各个组,分工合作搜索,提高了搜索效率,并且在评估无人机加入哪个组时考虑了距离和适应度,这有助于无人机在同时接收多个信号时有选择的加入组。
[0070]
考虑限制组大小是由于随着无人机数量的增加,组大小也增加,但是气体源数量
的增加将导致组规模的减小,因为同时寻找额外气体源所需的无人机数量也应增加。考虑到这一点,定义了用于限制组大小的函数。
[0071]
考虑组合并是由于在羽流跟踪期间,多个无人机组可能朝着同一气味源行进,因此提出侧风距离的测量方法,当两个组的全局最佳位置的无人机的y位置坐标差小于其半径之和时,合并两个组。但是由于气味源的分布可能位于x轴方向上的同一条直线上,此时侧风距离的测量方法不足以分辨出两个组是否处于同一个烟羽之内。因此,在侧风距离的基础上提出顺风距离的测量方法,即两个无人机组中表现最佳的无人机之间x方向的距离。如果两组之间的侧风距离小于其半径之和,且顺风距离小于顺风合并阈值,则合并两组。组合并操作可以提升系统性能和避免局部冗余覆盖。
附图说明
[0072]
图1是多未知目标定位整体流程图
[0073]
图2是多无人机群体分配的多未知目标定位方法流程图
[0074]
图3是采用组方法搜索流程图
[0075]
图4是改进海鸥算法流程图
[0076]
图5是组合并示意图
[0077]
图6是未达到组合并条件示意图
[0078]
图7是多气体源定位过程
具体实施方式:
[0079]
本发明的具体实施如下:
[0080]
一种基于群体分配的多未知目标定位方法,包括以下步骤:
[0081]
步骤1:在待监测区设定12架无人机;
[0082]
步骤2:初始化设定,即设定无人机的初始位置,位于羽流附近的阈值thr、气体源定位成功的阈值thg;
[0083]
步骤3:采用多无人机群体分配的多未知目标定位方法搜索气体污染源;
[0084]
步骤4:输出所有气体污染源位置。
[0085]
如图5所示,在羽流跟踪期间,多个无人机组可能朝着同一气味源搜索,导致性能下降和局部冗余覆盖,为了避免这个问题,本发明使用组合并方法,采用侧风距离cd和顺风距离td的测量方法,即两个无人机组中表现最佳的无人机之间y方向和x方向的距离。如果两组之间的侧风距离小于其半径之和,且顺风距离小于顺风合并阈值,则合并两组,该数学表达式如下:
[0086]cd
(y
gk-y
gl
)<(r
gk
r
gl
)
[0087]
td(x
gk-x
gl
)<lc[0088]
如图6所示,在多气体污染源浓度场仿真实验中,t=0s时刻,初始化12架无人机,采用多无人机群体分配的多未知目标定位方法搜索气体污染源;t=2015s时刻,各无人机在组方法的指导下,逐渐接近气体污染源;t=5254s时刻,已有分组找到了第一个气体污染源,并进行了组拆解操作,将拆解出的无人机分配给其他组,继续进行气体污染源的搜索;t=7295s时刻,四个气体污染源全部定位成功,各无人机停留在气体污染源附近,输出所有
气体污染源的位置,气体污染源定位过程结束。
[0089]
以上是本发明较佳的实施方式,但本发明的保护范围并不仅仅局限在此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡依本发明技术方案做变换或替换的,都应涵盖在本发明的保护范围内。因此,本发明的保护范围都应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。