1.本发明涉及一种用于传送基板的传送机器人和包括所述传送机器人的基板处理设备。
背景技术:
2.为了制造半导体器件,通过诸如照相、蚀刻、灰化、离子注入和薄膜沉积的多种过程在基板上形成期望的图案。在各个过程中使用多种处理液体,因此在过程中产生污染物和颗粒。为了解决这个问题,在每个过程之前和之后执行用于清洗污染物和颗粒的清洗过程。
3.通常,清洗过程执行液体处理过程和干燥处理过程。在液体处理过程中,将处理液体供应在基板上,并且在干燥处理过程中,去除残留在基板上的液体。液体处理过程包括化学处理步骤、漂洗操作和溶剂置换操作。化学处理操作利用化学品去除基板上的异物,漂洗操作去除残留在基板上的化学品,并且溶剂置换操作利用有机溶剂置换残留在基板上的漂洗溶液。
4.这将参考图1进行描述。通常,化学处理操作、漂洗操作和溶剂置换操作在液体处理腔室260中执行,并且干燥处理操作在干燥腔室280中执行。因此,已完成溶剂置换操作的基板被传送到干燥腔室280。
5.用于清洗基板的半导体设备通常具有n列和m层结构。在这种情况下,液体处理腔室260和干燥腔室280是随机匹配的,而不是在同一层上彼此匹配。如果在第一排第一层的液体处理腔室260中处理的基板与第二排第三层的干燥腔室相匹配,则基板在x、y和z轴上移动并旋转,使得溶剂行为最为严重。
技术实现要素:
6.本发明致力于提供一种能够有效地处理基板的基板处理设备和基板传送机器人。
7.本发明还致力于提供一种能够解决由于基板在液体处理腔室与干燥腔室之间移动的过程而可能发生的干燥缺陷的基板处理设备以及基板传送机器人。
8.本发明还致力于提供一种基板处理设备和基板传送机器人,它们通过提供用于借由排放在包括液体处理腔室的基板处理设施中的基板w的基板上而形成的液膜的监测系统而能够在干燥完成之后出现问题时解决来自部分单元的该问题。
9.本发明的目的不限于此,并且本领域的普通技术人员将从以下描述中清楚地理解未提及的其他目的。
10.本发明的示例性实施例提供了一种基板处理设备,包括:液体处理腔室,所述液体处理腔室被配置为利用液体处理基板;干燥腔室,所述干燥腔室被配置为干燥经液体处理的基板;传送机器人,所述传送机器人被配置为在所述液体处理腔室与所述干燥腔室之间传送所述基板,并且包括能够沿x轴、y轴和z轴移动并且能够基于所述z轴被可旋转地驱动的手部,并且所述基板放置在所述手部上;光学系统,所述光学系统被配置为拍摄所述基板
的液膜的形态,其中当所述基板从所述液体处理腔室传送到所述干燥腔室时,所述基板用化学液体润湿并且在形成液膜的状态下由所述传送机器人传送;以及控制器,所述控制器被配置为测量由所述光学系统拍摄的所述液膜的所述形态。
11.在示例性实施例中,所述光学系统可以在所述传送机器人在所述液体处理腔室中拾取所述基板的状态下,将通过拍摄所述液膜的所述形态而获得的第一数据传输到所述控制器,在所述传送机器人将所述基板投入所述干燥腔室之前,所述光学系统可以将通过拍摄所述液膜的所述形态而获得的第二数据传输到所述控制器,并且所述控制器可以将所述第一数据与所述第二数据进行比较,并且当所述第二数据中所述液膜的所述形态与所述第一数据相比超出误差范围时,所述控制器可以确定是否将所述基板装载到所述干燥腔室中,并存储所述第二数据。
12.在示例性实施例中,所述光学系统可以是相机,该相机从所述基板的侧表面拍摄所述基板的边缘区域。
13.在示例性实施例中,所述相机可被设置为拍摄所述基板的第一侧表面和作为所述第一侧表面的另一侧的第二侧表面。
14.在示例性实施例中,所述控制器可以测量作为所述化学液体相对于所述基板的所述第一侧表面的接触角的第一接触角和作为所述化学液体相对于所述基板的所述第二侧表面的接触角的第二接触角。
15.在示例性实施例中,所述光学系统可以在所述传送机器人在所述液体处理腔室中拾取所述基板的状态下,将通过拍摄所述液膜的所述形态而获得的第一数据传输到所述控制器,在所述传送机器人将所述基板投入所述干燥腔室之前,所述光学系统可以将通过拍摄所述液膜的所述形态而获得的第二数据传输到所述控制器,所述控制器可以测量作为所述化学液体相对于所述基板的所述第一侧表面的接触角的第一接触角和作为所述化学液体相对于所述基板的所述第二侧表面的接触角的第二接触角,并且所述控制器可以比较所述第一数据中的所述第一接触角和所述第二数据中的所述第一接触角,并且比较所述第一数据中的所述第二接触角和所述第二数据中的所述第二接触角,并且当所述第二数据中的所述第一接触角和所述第二接触角超出所述第一数据中的所述第一接触角和所述第二接触角的误差范围时,所述控制器可以确定是否将所述基板装载到所述干燥腔室中,并存储所述第二数据。
16.在示例性实施例中,当在所述干燥腔室中发生所述基板的干燥缺陷时,可提供所存储的第二数据作为分析数据。
17.在示例性实施例中,所述传送机器人还可以包括设置在所述手部上方的遮蔽构件,并且所述光学系统可设置为安装在所述遮蔽构件中。
18.在示例性实施例中,所述光学系统可以测量所述液膜的高度。
19.在示例性实施例中,可以设置多个液体处理腔室,其以n列和m行的阵列堆叠,可以设置多个干燥腔室,其以n列和m行的阵列堆叠,并且所述传送机器人可以在所述多个液体处理腔室与所述多个干燥腔室之间将所述基板传送到根据方案的位置。
20.在示例性实施例中,所述干燥腔室可以是利用超临界流体对所述基板进行干燥的超临界处理腔室。
21.本发明的另一个示例性实施例提供了一种通过将基板从第一腔室传送到第二腔
室来处理所述基板的方法,其中所传送的基板用化学液体润湿,并且在形成液膜的状态下由传送机器人传送,所述传送机器人包括能够沿x轴、y轴和z轴移动并且能够基于所述z轴被可旋转地驱动的手部,并且所述基板放置在所述手部上,并且拍摄所述基板的所述液膜的形态并且测量所拍摄的所述液膜的形态。
22.在示例性实施例中,在所述传送机器人在所述第一腔室中拾取所述基板的状态下,可以存储通过拍摄所述液膜的所述形态而获得的第一数据,在所述传送机器人将所述基板投入所述第二腔室之前,可以存储通过拍摄所述液膜的所述形态而获得的第二数据,并且控制器可以将所述第一数据与所述第二数据进行比较,并且当所述第二数据中所述液膜的所述形态与所述第一数据相比超出误差范围时,所述控制器可以确定是否将所述基板装载到所述第二腔室中,并存储所述第二数据。
23.在示例性实施例中,在所述传送机器人在所述第一腔室中拾取所述基板的状态下,可以存储通过拍摄所述液膜的所述形态而获得的第一数据,在所述传送机器人将所述基板投入所述第二腔室之前,可以存储通过拍摄所述液膜的所述形态而获得的第二数据,并且控制器可以测量作为所述化学液体相对于所述基板的第一侧表面的接触角的第一接触角和作为所述化学液体相对于所述基板的第二侧表面的接触角的第二接触角,并且所述控制器可以比较所述第一数据中的所述第一接触角和所述第二数据中的所述第一接触角,并且比较所述第一数据中的所述第二接触角和所述第二数据中的所述第二接触角,并且当所述第二数据中的所述第一接触角和所述第二接触角超出所述第一数据中的所述第一接触角和所述第二接触角的误差范围时,所述控制器可以确定是否将所述基板装载到所述第二腔室,并存储所述第二数据。
24.在示例性实施例中,当在所述干燥腔室中发生所述基板的干燥缺陷时,可提供所存储的第二数据作为分析数据。
25.在示例性实施例中,所述第一腔室可以是液体处理腔室,并且第二腔室可以是干燥腔室。
26.在示例性实施例中,所述干燥腔室可以是利用超临界流体对所述基板进行干燥的超临界处理腔室。
27.根据本发明的各种示例性实施例,可以高效地处理基板。
28.根据本发明的多个示例性实施例,可以解决由于基板在液体处理腔室与干燥腔室之间移动的过程而可能出现的干燥缺陷。
29.根据本发明的示例性实施例,提供包括液体处理腔室、用于在基板w的表面上排放和形成的液膜的监测系统的液体处理设施,使得可以在干燥完成之后出现问题时解决部分单元中的该问题。
30.本发明的效果不限于上述效果,并且本领域技术人员可以从本说明书和附图清楚地理解未提及的效果。
附图说明
31.图1是示出了在相关技术中的清洗设施中发生的问题的图示。
32.图2是示出了根据本发明的示例性实施例的基板处理设施的顶部平面图。
33.图3是沿a-a方向观察的图2的基板处理设施的剖视图。
34.图4是示意性地示出了根据本发明的第一示例性实施例的传送机器人的顶部平面图。
35.图5是示意性地示出了根据本发明的第二示例性实施例的传送机器人的透视图。
36.图6是从正面观察的图5的传送机器人的前视图。
37.图7是示出了溶剂行为的示例的剖视图。
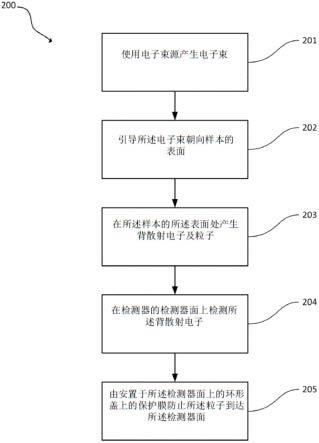
38.图8是示出了根据本发明的示例性实施例的基板处理方法的流程的图示。
39.图9是示出了根据本发明的示例性实施例的基板处理方法的流程的图示。
具体实施方式
40.在下文中,将在下文参考附图更全面地描述本发明的示例性实施例,在这些附图中示出了本发明的示例性实施例。然而,本发明可被不同地实施并且不限于以下实施例。此外,在详细描述本发明的示例性实施例时,如果确定对相关公知功能或装置的详细描述可能不必要地使本发明的主旨不清楚时,将省略其详细描述。此外,对于具有类似功能和作用的部件,在整个附图中使用相同的附图标记。
41.另外,除非明确地相反地描述,否则词语“包括”和诸如“包括了”或“包括有”的变体将被理解为暗示包括所陈述的元件,但不排除任何其他元件。应当了解,术语“包括”和“具有”旨在指定存在特性、数量、步骤、操作、组成元件和本说明书中所描述的部件或它们的组合,但是并不排除预先存在或添加一个或多个其它特性、数量、步骤、操作、组成元件和部件或它们的组合的可能性。
42.本文所使用的单数表达包括复数表达,除非它们在上下文中具有明确相反的含义。因此,为了更清楚地描述,图中元件的形状、大小等可能被放大。
43.表述“和/或”包括每个提及的项目以及包括一个或多个项目的所有组合。此外,在本说明书中,“连接”不仅意指构件a和构件b直接连接的情况,还包括通过将构件c插置在构件a与构件b之间而间接地连接构件a和构件b的情况。
44.可以各种形式修改本发明的示例性实施例,并且本发明的范围不应被解释为限于以下示例性实施例。将提供本技术示例性实施例以向本领域技术人员更完整地解释本发明。因此,附图中的元件的形状被放大以强调更清晰的描述。
45.图2是示出了根据本发明的示例性实施例的基板处理设施的顶部平面图。图3是沿a-a方向观察的图2的基板处理设施的剖视图。将参考图2和图3描述基板处理设施。处理基板的基板处理设施1包括转位模块10和过程处理模块20。转位模块10包括装载端口120和传送框架140。装载端口120、传送框架140和过程处理模块20可按顺序串联地布置。在下文中,布置装载端口120、传送框架140和过程处理模块20的方向被称为第一方向12,并且当从上方看时垂直于第一方向12的方向被称为第二方向14,并且垂直于包括第一方向12和第二方向14的平面的方向被称为第三方向16。
46.容纳基板w的载体18安置在装载端口120上。设置多个装载端口120,并且该多个装载端口120在第二方向14上串联布置。在图2中,示出的是,设置四个装载端口120。然而,装载端口120的数量可以根据过程处理模块20的处理效率和占用空间的条件等来增加或减少。设置用于支撑基板的边缘的狭槽(未示出)在载体18中形成。在第三方向16上提供多个狭槽,并且基板在载体内被定位成堆叠,同时在第三方向16上彼此间隔开。作为载体18,可
以使用前开式晶圆传送盒(foup)。
47.过程处理模块20包括缓冲单元220、传送腔室240以及作为处理腔室的液体处理腔室260和干燥腔室280。传送腔室240被设置成使得其纵向方向平行于第一方向12。在作为处理腔室的液体处理腔室260和干燥腔室280中对基板进行处理,并且形成基板通过其进入和离开的入口。液体处理腔室260设置在传送腔室240沿第二方向14的一侧处,而干燥腔室280设置在传送腔室240的另一侧处。液体处理腔室260和干燥腔室280可以设置为基于传送腔室240彼此对称。一些液体处理腔室260设置在传送腔室240的纵向方向上。此外,一些液体处理腔室260被设置为彼此堆叠。即,液体处理腔室260可以a
×
b(a和b中的每一者是等于或大于1的自然数)的阵列设置在传送腔室240的一侧。在本文中,a是沿第一方向12串联设置的液体处理腔室260的数量,并且b是沿第三方向16串联设置的液体处理腔室260的数量。当在传送腔室240的一侧处提供六个或九个液体处理腔室260时,液体处理腔室260可以3
×
2或3
×
3的阵列设置。液体处理腔室260的数量也可以增加或减少。类似于液体处理腔室260,干燥腔室280可以m
×
n(m和n中的每一者是等于或大于1的自然数)的阵列布置。在本文中,m和n可分别与a和b相同。与前述不同,液体处理腔室260和干燥腔室280两者可仅设置在传送腔室240的一侧。此外,与前述描述不同,液体处理腔室260和干燥腔室280中的每一者可以单层设置在传送腔室240的一侧和另一侧。可选地,液体处理腔室260s可以被定位成堆叠在传送腔室240的一侧,并且干燥腔室280可以被定位成堆叠在传送腔室240的另一侧。此外,与前述不同,液体处理腔室260s和干燥腔室280可以多种布置设置。
48.缓冲单元220设置在传送框架140与传送腔室240之间。缓冲单元220提供在传送腔室240与传送框架140之间传送基板w之前基板w停留于其中的空间。在缓冲单元220的内部设置其上放置有基板w的狭槽(未示出),并且多个狭槽(未示出)在第三方向16上彼此间隔开地设置。缓冲单元220的面向传送框架140的表面和缓冲单元220的面向传送腔室240的表面是开放的。
49.传送框架140在安置在装载端口120上的载体18与缓冲单元220之间传送基板w。转位轨道142和转位机器人144被提供给传送框架140。转位轨道142被设置成使得其纵向方向平行于第二方向14。转位机器人144安装在转位轨道142上,并且在第二方向14上沿着转位轨道142线性地移动。转位机器人144包括基座144a、主体144b和转位臂144c。基座144a安装成可沿转位轨道142移动。主体144b联接到基座144a。主体144b被设置成可在基座144a上沿第三方向16移动。此外,主体144b被设置成可在基座144a上旋转。转位臂144c联接到主体144b并且被设置成可相对于主体144b向前和向后移动。多个转位臂144c被设置成单独驱动。转位臂144c被设置成在沿第三方向16彼此间隔开的状态下堆叠。当将基板w从过程处理模块20传送到载体18时,可以使用转位臂144c的一部分,并且当将基板w从载体18传送到过程处理模块20时,可以使用多个转位臂144c的另一个部分。这可以防止从过程处理之前的基板w产生的颗粒在转位机器人144装载和卸载基板w的过程中附着到过程处理之后的基板w。
50.通过液体处理腔室260和干燥腔室280的入口将基板w传送进出作为处理腔室的液体处理腔室260和干燥腔室280的传送机器人244被提供到传送腔室240。根据示例性实施例,传送机器人244在缓冲单元220、液体处理腔室260及干燥腔室280之间传送基板w。传送机器人244被设置成可沿着转位轨道242移动。导轨242被设置成使得其纵向方向平行于第
一方向12。传送机器人244安装在导轨242上并沿第一方向12在导轨242上线性地移动。此外,传送机器人244可沿第三方向16上下移动。此外,传送机器人244可以第三方向作为轴线旋转。在传送腔室240中,提供了在其中的传送区域中产生向下气流的风扇单元246。向下气流防止内部异物(诸如颗粒和烟雾)漂浮。当将基板w从液体处理腔室260传送到干燥腔室280时,基板w在保留从液体处理腔室260供应的液体的状态下被传送。
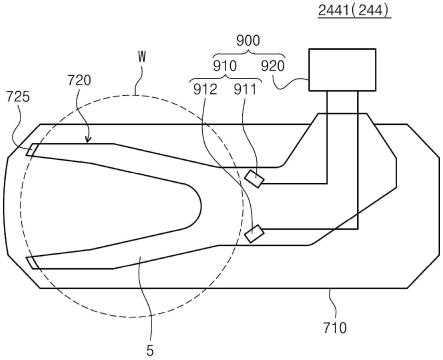
51.图4是示意性地示出了根据本发明的第一示例性实施例的传送机器人的顶部平面图。将参考图4描述传送机器人。根据本发明的第一示例性实施例的传送机器人2441是传送机器人244的示例。传送机器人2441包括基座710和手部720。
52.基座710可在水平方向和竖直方向上线性地移动,并且可以设置为可基于平行于竖直方向的轴线旋转。手部720联接到基座710。根据示例性实施例,手部720设置在基座710上方。
53.手部720抓持基板w。手部720被设置为可前后线性移动。例如,手部720从基座710的顶部向前移动以在手部720的座部721偏离基座710的上表面的位置处接收基板w。之后,传送机器人244在手部720在基板w被放置并位于面向基座710的上表面的位置处的状态下向后移动的状态下移动基座710,以将基座710移动到与基板w将被放置的目标位置相邻的位置。之后,手部720在向前移动以便放置在目标位置上方的状态下将基板w接收至该目标位置。
54.根据示例性实施例,手部720包括座部721和引导突出部725。基板w被安置在座部721上。支撑基板w的底表面的多个突出部可以设置到座部721的上表面。引导突出部725支撑安置在座部721的适当位置中的基板w的前侧部分。引导突出部725从座部721向上突出。多个引导突出部725可以设置为彼此间隔开。
55.驱动构件(未示出)使手部720前后移动。根据示例性实施例,驱动构件(未示出)包括提供移动手部720的驱动力的马达。
56.根据示例性实施例,相机910被提供给传送机器人244。相机910包括拍摄第一侧面的第一相机911和拍摄第二侧面的第二相机912。相机910在水平方向拍摄基板w并监测液膜l的边缘区域。由相机910捕获的数据被传输到控制器920。控制器920测量液膜l的接触角。作为更具体的示例,控制器920测量液膜l的边缘区域的接触角。下文将详细描述利用所测量的接触角的情况。相机910可以位于推动器引导件(未示出)上方,用于将放置在座部721上的基板w的位置调整到适当位置。
57.图5是示意性地示出了根据本发明的第二示例性实施例的传送机器人的透视图。图6是从正面观察的图5的传送机器人的前视图。将参考图5和图6描述作为图2和图3中所提供的传送机器人244的示例的传送机器人2442。传送机器人2442包括基座710、手部720和遮蔽构件730。
58.基座710被设置为沿着导轨242移动。基座710支撑手部720。
59.基板w放置在手部720上。手部720被设置为可相对于基座710进行伸缩。手部710通过入口直接将基板w装载到作为处理腔室的液体处理腔室260和干燥腔室280中或从其卸载。多个手部720可以被设置为彼此堆叠。
60.遮蔽构件730使由风扇单元246形成的向下气流到达放置在手部720上的基板的情况最小化。遮蔽构件730固定地联接到基座710,以便设置于手部720上方。当手部720将基板
w装载到作为处理腔室的液体处理腔室260和干燥腔室280中或从其卸载时,遮蔽构件730可以设置在比入口261和281的上端更高的位置处。当从顶部看时,遮蔽构件730设置有比基板w的面积更大的面积。
61.遮蔽构件730倾斜设置,使得高度从中心朝向两侧降低。因此,向下气流沿着遮蔽构件730的倾斜表面从手部720的提供有基板w的区域流出。当从顶部看时,遮蔽构件730可被设置成使得两个板的一个侧表面在手部720的中心区域中彼此固定地联接。每个板可被设置为沿向下方向从手部720的中心区域到边缘区域倾斜。当手部720将基板装载到作为处理腔室的液体处理腔室260和干燥腔室280中或从其卸载时,遮蔽构件730可以设置在比作为处理腔室的液体处理腔室260和干燥腔室280的入口的上端更高的位置处。遮蔽构件730被设置为充分邻近入口261和281,以便防止向下气流通过入口261和281引入。如上所述,遮蔽构件730设置在手部720上方,使得在传送腔室240内传送基板期间防止向下气流直接接触放置在手部720上的基板w。
62.此外,传送机器人2442可禁止在将基板w装载到作为处理腔室的液体处理腔室260和干燥腔室280中/从其卸载时通过入口引入向下气流。遮蔽构件730设置有用于防止产生静电的不间断材料(uninterruptible material)。例如,遮蔽构件730可以由不间断的氯乙烯树脂(pvc)制成。
63.根据示例性实施例,相机1910安装在遮蔽构件730中。相机1910可以安装在遮蔽构件730的最高位置处。相机1910可被设置为能够测量液膜的高度的相机。相机1910从上方拍摄基板w并监测液膜l的高度。由相机1910捕获的数据被传输到控制器920。控制器1910计算液膜l的每个区域的高度。作为更具体的示例,控制器920计算液膜l的边缘区域的高度。下文将详细描述利用所测量的高度的情况。
64.图7是示出了溶剂行为的示例的剖视图。将参考图7描述作为在基板w上形成的液膜的溶剂l的行为。例如,即使在初始设置时将排放到基板w的表面的化学液体的量设置为10g,并且根据化学液体的行为,化学液体的量是相同的,而在基板w移动到干燥腔室280时,化学液体l的厚度也可以针对基板w的表面上的每个区域而不同。例如,如(b)、(c)和(d)的图所示,由于化学液体向左偏而使液膜l向左上升的情况((b),左侧上升的示例)、由于化学液体向右偏而使液膜l向右上升的情况((c),右侧上升的示例)、以及由于化学液体被收集到中心而使液膜l上升的情况((d),中心上升的示例)是代表性情况。与代表性示例一样,当发生化学液体的行为并且在液膜l的不均匀状态下将基板移动到干燥腔室280然后进行干燥时,因为蒸发量根据化学液体l的厚度而不同,所以可能首先发生局部蒸发。局部蒸发最终导致作为干燥缺陷的图案塌陷或倾斜。
65.图8是示出了根据本发明的示例性实施例的基板处理方法的流程的图示。图9是示出了根据本发明的示例性实施例的基板处理方法的流程的图示。将参考图8和图9描述基板处理方法。
66.在液体处理腔室260中利用化学液体(例如,ipa)润湿基板w之后,在传送机器人244拾取基板w的状态下测量液膜的形态,并且将所测量的液膜的形态作为第一数据存储。然后,在将基板w投入干燥腔室280中之前测量液膜的形态,并且将所测量的液膜的形态作为第二数据存储。比较第一数据和第二数据。如图8所述,当将根据第二数据的液膜形态和根据第一数据的液膜形态进行比较并且比较结果超出设定误差范围时,确定是否将基板w
装载到干燥腔室280中并存储数据。当基板w中发生干燥缺陷时,所存储数据可以用于后期分析。如图9所述,当将根据第二数据的液膜形态和根据第一数据的液膜形态进行比较并且比较结果在设定误差范围内时,将基板w装载到干燥腔室280中并存储数据。当基板w中发生干燥缺陷时,所存储数据可以用于后期分析。
67.根据第一示例性实施例,化学液体的形态的测量是测量化学液体的接触角。在液体处理腔室260中利用化学液体(例如,ipa)润湿基板w之后,相机910在传送机器人244拾取基板w的状态下拍摄液膜l的边缘区域。控制器920根据所拍摄数据测量液膜l的接触角,并且将所测量的接触角作为第一数据存储。然后,在将基板w投入干燥腔室280中之前,相机910拍摄液膜l的边缘区域。控制器920测量液膜l的接触角并且将所测量的接触角作为第二数据存储。控制器920比较第一数据和第二数据。当将根据第二数据的液膜的接触角与根据第一数据的液膜的接触角进行比较并且比较结果超出设定的误差范围时,确定是否将基板w装载到干燥腔室280中,并存储数据。例如,当将根据第二数据的液膜的接触角与根据第一数据的液膜的接触角进行比较并且比较的结果超出设定的误差范围时,控制器920等待设定时间,直到基板w上的液膜l自身稳定为止,并且当重新测量的结果在误差范围内时,可以将基板w装载到干燥腔室280中。
68.根据第二示例性实施例,化学液体的形态的测量是测量每个区域的化学液体的高度。在液体处理腔室260中利用化学液体(例如,ipa)润湿基板w之后,相机1910在传送机器人244拾取基板w的状态下拍摄液膜l的整个区域。控制器1920根据所拍摄数据测量每个区域的液膜l的高度,并且存储所测量高度作为第一数据。然后,在将基板w投入干燥腔室280中之前,相机1910拍摄液膜l的整个区域。控制器1920测量每个区域的液膜l的高度并且存储所测量高度作为第二数据。控制器1920比较第一数据和第二数据。当将根据第二数据的每个区域的液膜高度与根据第一数据的每个区域的液膜高度进行比较并且比较的结果超出设定的误差范围,或者根据第二数据的每个区域的液膜的高度使得可能发生图案塌陷时,确定是否将基板w装载到干燥腔室280中,并存储数据。例如,当将根据第二数据的液膜的高度与根据第一数据的液膜的高度进行比较并且比较的结果超出设定的误差范围时,控制器1920等待设定时间,直到基板w上的液膜l自身稳定为止,并且当重新测量的结果在误差范围内时,可以将基板w装载到干燥腔室280中。
69.作为本发明的示例性实施例,相机910被提供到传送机器人244的手部,但是相机910可以被提供到收集清洗腔室中的处理液体的碗状物的端部。此外,相机910也可以提供到入口的两侧,基板w通过所述入口被插入干燥腔室280中。如果相机910能够如本发明的第一实施例那样测量基板w的边缘区域的接触角,则可以改变设计以将相机910设置在本示例之外的其他地方。
70.根据本发明的示例性实施例,提供液体处理装置和设施、用于在基板w的表面上排放和形成的液膜的监测系统,使得可以在干燥完成之后出现问题时解决部分单元中的该问题。
71.控制器可以控制基板处理设备和设施的组成元件,从而根据设定的过程处理基板。此外,控制器可以包括由执行基板处理设备和设施的控制的微处理器(计算机)形成的处理器控制器、执行命令输入操纵以便操作员管理基板处理设备和设施的键盘、由可视化和显示基板处理设备的操作情况的显示器等形成的用户接口、以及存储用于根据控制器或
程序(也就是说,用于根据各种数据和处理条件执行对每个配置的处理的处理方案)的控制来执行在基板处理设备和设施中执行的过程的控制程序的存储单元。此外,用户界面和存储单元可以连接到过程控制器。处理方案可以存储在存储单元中的存储介质中,并且存储介质可以是硬盘,并且也可以是便携式盘,诸如cd-rom或dvd,或者半导体存储器,诸如闪存。
72.前述详细描述示出了本发明。此外,以上内容示出并描述了本发明的示例性实施例,并且本发明可在各种其他组合、修改和环境中使用。也就是说,在本说明书所公开的发明构思的范围、与本公开等同的范围和/或本领域技术人员或知识的范围内,可以对前述内容进行修改或修正。前述示例性实施例描述了用于实现本发明的技术精神的最佳状态,并且本发明的特定应用领域和用途所需要的各种变化都是可能的。因此,以上本发明的详细描述不意图将本发明限于所公开的示例性实施例。此外,所附权利要求应被解释为也包括其他示例性实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。