1.本发明涉及声学技术领域,具体为气动微张力高精度绷膜系统。
背景技术:
2.在声学领域,膜片是旨在将机械振动转换为声音的换能器,反之亦然,它通常由悬挂在其边缘的薄膜或各种材料的薄片构成,不断变化的声波气压使振动膜片产生机械振动,然后可以将其转换为其他类型的信号,在麦克风和人的耳膜中可以找到这种振膜的例子,相反,由能量源振动的振动膜撞击空气,产生声波,这类振膜的例子是扬声器振膜和耳机空气喇叭中有隔膜和隔膜。
3.膜片在使用时需要磁控溅射镀膜,为了保证镀膜均匀,需要利用绷膜系统,但是传统绷膜系统无法使张力维持在一个很小范围,易使膜因过度拉扯发生形变或者因未绷紧而出现褶皱,无法使镀膜均匀,一致性差,为此,提出气动微张力高精度绷膜系统。
技术实现要素:
4.本发明的目的在于提供气动微张力高精度绷膜系统,以解决上述背景技术中提出的无法使张力维持在一个很小范围,易使膜因过度拉扯发生形变或者因未绷紧而出现褶皱,无法使镀膜均匀,一致性差的问题。
5.为实现上述目的,本发明提供如下技术方案:气动微张力高精度绷膜系统,包括第一箱体、放卷筒和收卷筒,所述第一箱体的两端均连通有第二箱体,所述第二箱体的底部固定连接有底座,所述放卷筒和收卷筒分别纵向设置在两个第二箱体内,所述第二箱体上固定连接有电机,所述第二箱体远离电机的一面转动安装有连接轴,所述电机的输出端和连接轴相互靠近的一端设置有与放卷筒和收卷筒配合使用的辅助定位组件,所述放卷筒上设置有膜片本体,所述膜片本体的一端缠绕在收卷筒上,所述箱体内腔顶部的两侧沿上下方向转动装设有多组与膜片本体配合使用的第一导向滚筒,所述箱体内腔的两侧沿上下方向纵向转动装设有多组与膜片本体配合使用的第二导向滚筒,所述第二导向滚筒位于第一导向滚筒相互靠近的一侧,所述第一箱体内腔的底部设置有支腿,且支腿上设置有极板,所述极板上沿左右方向依次设置有三组磁铁,所述磁铁上设置有背板,所述背板上设置有靶材,所述靶材位于膜片本体的正下方,所述底座上固定连接有真空泵,所述真空泵的进气端连通有总管,所述总管上沿左右方向依次连通有四组抽气管,所述抽气管的一端分别贯穿至第一箱体和第二箱体内,所述第一箱体内设置有与膜片本体配合使用的气动微调机构。
6.作为一种优选方案:所述辅助定位组件包括固定连接在电机的输出端和连接轴相互靠近一端的卡座,所述放卷筒和收卷筒上均固定连接有方块,所述方块的一端滑动连接有卡块,所述卡块的一端卡接在卡座内,所述卡座的底部插设有固定螺栓,且固定螺栓的一端贯穿卡块和卡座并螺纹连接有固定螺母。
7.作为一种优选方案:所述气动微调机构包括开设在第一箱体顶部的方槽,所述方槽内设置有真空窗,所述第一箱体上固定连接有辅助架,所述辅助架位于方槽的上方,所述
辅助架内腔的顶部固定连接有与膜片本体配合使用的激光位移传感器,所述第一箱体内腔的一侧纵向转动装设有与膜片本体配合使用的曲轴,所述曲轴贯穿第一箱体并固定连接有驱动板,所述第一箱体背面的一侧固定连接有气泵,所述气泵的出气端连通有u型管,所述u型管的两端分别连通有缓冲罐,所述缓冲罐固定连接在第一箱体上,所述缓冲罐内固定连接有与u型管配合使用的缓冲板,所述缓冲罐相互远离的一侧连通有出气管,所述出气管的一端连通有密封筒,所述密封筒的表面固定连接在第一箱体上,所述密封筒内滑动设置有活塞杆,所述驱动板的顶部和底部均横向开设有固定槽,所述固定槽的内壁上贴合有导向块,所述活塞杆相互靠近的一端转动装设在导向块上,所述密封筒远离出气管的一侧连通有排气管,所述u型管上设置有两组第一电磁阀,所述第一电磁阀位于气泵出气端的两侧,所述排气管上设置有第二电磁阀,所述出气管靠近密封筒的一端设置有单向阀。
8.作为一种优选方案:所述真空窗的厚度小于6mm,所述激光位移传感器在测量时需要增加激光亮度。
9.作为一种优选方案:所述电机的输出端和连接轴位于同一纵向轴线上。
10.作为一种优选方案:所述卡座相互靠近一侧的底部固定连接有底板,所述底板的顶部与卡块的底部贴合。
11.作为一种优选方案:所述连接轴固定连接有固定盘。
12.作为一种优选方案:所述第一箱体的正面铰接有第一密封门,所述第二箱体的顶部铰接有第二密封门,所述第一箱体底部的一侧连通有辅助管,所述辅助管上设置有辅助电磁阀。
13.与现有技术相比,本发明的有益效果是:1.本发明中,通过设置气动微调机构,利用激光位移传感器预先记录与膜片本体之间的距离值,同时可在镀膜时实时监测与膜片本体之间的距离,若是距离发生改变,且改变值超出预设范围值,则将信号传输至控制器,此时控制器控制气泵开启,并在缓冲罐的缓冲作用下,将气体经由出气管快速充入对应密封筒内,配合另一组密封筒对应的第二电磁阀,可使气体不断推动活塞杆移动,从而可推动驱动板进行摆动,同时可推动另一组密封筒内的活塞杆同向移动,使另一组密封筒内的气体经由对应出气管快速排出,同时驱动板可带动曲轴同步摆动,对膜片本体的松紧度进行微调,直至激光位移传感器检测到膜片本体恢复最初状态,此时另一组电磁阀及时关闭,使两组活塞杆同时保持静止状态,通过对曲轴摆动角度的微调,配合激光位移传感器的精准测距,可使张力维持在一个很小范围,可有效避免膜片本体因过度拉扯发生形变或者因未绷紧而出现褶皱,提高了镀膜的均匀性和一致性。
14.2.本发明中,通过设置辅助定位组件,利用可在方块上滑动的卡块,可快速插接在卡座内,同时利用固定螺栓和固定螺母的螺纹对接,可将卡座和卡块快速固定,从而可将放卷筒和收卷筒快速固定,同时也可将放卷筒和收卷筒快速拆卸更换,同时真空窗的厚度小于6mm和在测量时需要增加激光亮度,可有效避免真空窗对激光位移传感器的接收端进行干扰,进一步提高了激光位移传感器在测量时的精准度。
15.3.本发明中,通过设置电机的输出端和连接轴位于同一纵向轴线上,可保证收卷筒和放卷筒可正常转动,避免电机的输出端和连接轴偏移,使电机的输出端和连接轴在转动时折断,同时底板的设计,可对卡块进行预支撑,提高了安装效率,固定盘的设计,可对连
接轴增加一定的重量,使其在与收卷筒或者放卷筒对接前,使卡座始终处于垂直,方便对接。
附图说明
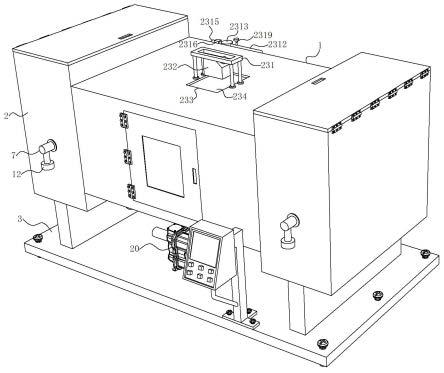
16.图1为本发明气动微张力高精度绷膜系统的结构示意图;图2为本发明气动微张力高精度绷膜系统的结构后视图;图3为本发明气动微张力高精度绷膜系统的结构剖视图;图4为本发明气动微张力高精度绷膜系统的结构局部立体图;图5为本发明气动微调机构的结构立体图;图6为本发明缓冲罐的结构剖视图。
17.图中:1、第一箱体;2、第二箱体;3、底座;4、放卷筒;5、收卷筒;6、电机;7、连接轴;8、方块;9、卡座;10、卡块;11、底板;12、固定盘;13、膜片本体;14、第一导向滚筒;15、第二导向滚筒;16、极板;17、磁铁;18、背板;19、靶材;20、真空泵;21、总管;211、抽气管;22、辅助管;23、气动微调机构;231、辅助架;232、激光位移传感器;233、方槽;234、真空窗;235、曲轴;236、驱动板;237、气泵;238、u型管;239、第一电磁阀;2310、缓冲罐;2311、缓冲板;2312、出气管;2313、密封筒;2314、活塞杆;2315、排气管;2316、第二电磁阀;2317、固定槽;2318、导向块;2319、单向阀。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.实施例1请参阅图1-6,本发明提供一种技术方案:气动微张力高精度绷膜系统,包括第一箱体1、放卷筒4和收卷筒5,第一箱体1的两端均连通有第二箱体2,第二箱体2的底部固定连接有底座3,底座3上通过安装架固定连接有控制器,放卷筒4和收卷筒5分别纵向设置在两个第二箱体2内,第二箱体2上固定连接有电机6,第二箱体2远离电机6的一面转动安装有连接轴7,电机6的输出端和连接轴7相互靠近的一端设置有与放卷筒4和收卷筒5配合使用的辅助定位组件。
20.放卷筒4上设置有膜片本体13,所述膜片本体13的一端缠绕在收卷筒5上,第一箱体1内腔顶部的两侧沿上下方向转动装设有多组与膜片本体13配合使用的第一导向滚筒14,第一箱体1内腔的两侧沿上下方向纵向转动装设有多组与膜片本体13配合使用的第二导向滚筒15,所述第二导向滚筒15位于第一导向滚筒14相互靠近的一侧,第一箱体1内腔的底部设置有支腿,且支腿上设置有极板16,极板16上沿左右方向依次设置有三组磁铁17,磁铁17上设置有背板18,背板18上设置有靶材19,所述靶材19位于膜片本体13的正下方。
21.底座3上固定连接有真空泵20,真空泵20的进气端连通有总管21,总管21上沿左右方向依次连通有四组抽气管211,所述抽气管211的一端分别贯穿至第一箱体1和第二箱体2内,第一箱体1内设置有与膜片本体13配合使用的气动微调机构23,气动微调机构23的设
计,通过对曲轴235摆动角度的微调,配合激光位移传感器232的精准测距,可使张力维持在一个很小范围,可有效避免膜片本体13因过度拉扯发生形变或者因未绷紧而出现褶皱,提高了镀膜的均匀性和一致性。
22.实施例2请参阅图1-6,本发明提供一种技术方案:气动微张力高精度绷膜系统,包括第一箱体1、放卷筒4和收卷筒5,第一箱体1的两端均连通有第二箱体2,第二箱体2的底部固定连接有底座3,底座3上通过安装架固定连接有控制器,放卷筒4和收卷筒5分别纵向设置在两个第二箱体2内,第二箱体2上固定连接有电机6,第二箱体2远离电机6的一面转动安装有连接轴7,电机6的输出端和连接轴7相互靠近的一端设置有与放卷筒4和收卷筒5配合使用的辅助定位组件。
23.辅助定位组件包括固定连接在电机6的输出端和连接轴7相互靠近一端的卡座9,放卷筒4和收卷筒5上均固定连接有方块8,方块8的一端滑动连接有卡块10,所述卡块10的一端卡接在卡座9内,卡座9的底部插设有固定螺栓,且固定螺栓的一端贯穿卡块10和卡座9并螺纹连接有固定螺母,辅助定位组件的设计,可将放卷筒4和收卷筒5快速固定,同时也可将放卷筒4和收卷筒5快速拆卸更换,卡座9相互靠近一侧的底部固定连接有底板11,底板11的顶部与卡块10的底部贴合。
24.底板11的设计,可对卡块10进行预支撑,提高了安装效率,放卷筒4上设置有膜片本体13,所述膜片本体13的一端缠绕在收卷筒5上,电机6的输出端和连接轴7位于同一纵向轴线上,可保证收卷筒5和放卷筒4可正常转动,避免电机6的输出端和连接轴7偏移,使电机6的输出端和连接轴7在转动时折断,连接轴7固定连接有固定盘12。
25.固定盘12的设计,可对连接轴7增加一定的重量,使其在与收卷筒5或者放卷筒4对接前,使卡座9始终处于垂直,方便对接,第一箱体1内腔顶部的两侧沿上下方向转动装设有多组与膜片本体13配合使用的第一导向滚筒14,第一箱体1内腔的两侧沿上下方向纵向转动装设有多组与膜片本体13配合使用的第二导向滚筒15,所述第二导向滚筒15位于第一导向滚筒14相互靠近的一侧,第一箱体1内腔的底部设置有支腿,且支腿上设置有极板16,极板16上沿左右方向依次设置有三组磁铁17。
26.磁铁17上设置有背板18,背板18上设置有靶材19,所述靶材19位于膜片本体13的正下方,底座3上固定连接有真空泵20,真空泵20的进气端连通有总管21,总管21上沿左右方向依次连通有四组抽气管211,所述抽气管211的一端分别贯穿至第一箱体1和第二箱体2内,第一箱体1的正面铰接有第一密封门,第二箱体2的顶部铰接有第二密封门,第一密封门和第二密封门的设计,便于对第一箱体1和第二箱体2进行密封,同时可方便对第一箱体1和第二箱体2内的设备进行取放和维护。
27.第一箱体1底部的一侧连通有辅助管22,辅助管22上设置有辅助电磁阀,可对第一箱体1和第二箱体2内充入气体,第一箱体1内设置有与膜片本体13配合使用的气动微调机构23,气动微调机构23包括开设在第一箱体1顶部的方槽233,方槽233内设置有真空窗234,第一箱体1上固定连接有辅助架231,所述辅助架231位于方槽233的上方,辅助架231内腔的顶部固定连接有与膜片本体13配合使用的激光位移传感器232,第一箱体1内腔的一侧纵向转动装设有与膜片本体13配合使用的曲轴235。
28.曲轴235贯穿第一箱体1并固定连接有驱动板236,第一箱体1背面的一侧固定连接
有气泵237,气泵237的出气端连通有u型管238,u型管238的两端分别连通有缓冲罐2310,所述缓冲罐2310固定连接在第一箱体1上,缓冲罐2310内固定连接有与u型管238配合使用的缓冲板2311,缓冲罐2310相互远离的一侧连通有出气管2312。
29.出气管2312的一端连通有密封筒2313,所述密封筒2313的表面固定连接在第一箱体1上,密封筒2313内滑动设置有活塞杆2314,驱动板236的顶部和底部均横向开设有固定槽2317,固定槽2317的内壁上贴合有导向块2318,所述活塞杆2314相互靠近的一端转动装设在导向块2318上,密封筒2313远离出气管2312的一侧连通有排气管2315,u型管238上设置有两组第一电磁阀239。
30.所述第一电磁阀239位于气泵237出气端的两侧,排气管2315上设置有第二电磁阀2316,出气管2312靠近密封筒2313的一端设置有单向阀2319,气动微调机构23的设计,通过对曲轴235摆动角度的微调,配合激光位移传感器232的精准测距,可使张力维持在一个很小范围,可有效避免膜片本体13因过度拉扯发生形变或者因未绷紧而出现褶皱,提高了镀膜的均匀性和一致性,真空窗234的厚度小于6mm,激光位移传感器232在测量时需要增加激光亮度,可有效避免过厚的真空窗234对激光位移传感器232的接收端进行干扰,进一步提高了激光位移传感器232在测量时的精准度。
31.工作原理:利用激光位移传感器232预先记录与膜片本体13之间的距离值,并将距离值的信息传输至控制器内,并预设可允许出现的距离误差值,随后使用者通过真空泵20在总管21的辅助下,将第一箱体1和第二箱体2抽成真空,并在极板16、磁铁17、背板18和靶材19的辅助下,对膜片本体13进行磁控溅射镀膜,随后使用者通过控制器开启两组电机6,从而可带动放卷筒4和收卷筒5进行转动,一边对膜片本体13进行释放,一边对镀膜后的膜片本体13进行收卷,此时激光位移传感器232可在镀膜时实时监测与膜片本体13之间的距离,若是距离发生改变,且改变值超出预设范围值,则将信号传输至控制器。
32.此时控制器控制气泵237开启,并使气泵237缓慢对u型管238内充气,并在第一电磁阀239的配合下,选择需要充气的缓冲罐2310,同时第一电磁阀239可控制充气量,同时缓冲罐2310和缓冲板2311可对气体进行及时缓冲,避免气体直接涌入,造成瞬时冲击力过大,易使曲轴235摆动幅度过大,损坏膜片本体13。
33.随后气体可经由出气管2312快速充入对应密封筒2313内,并同步开启与另一组密封筒2313对应的第二电磁阀2316,此时气体不断推动活塞杆2314移动,此时活塞杆2314在固定槽2317和导向块2318的辅助下,可推动驱动板236进行摆动,同时可推动另一组密封筒2313内的活塞杆2314同向移动,使另一组密封筒2313内的气体经由对应出气管2312快速排出。
34.同时驱动板236可带动曲轴235同步摆动,对膜片本体13的松紧度进行微调,直至激光位移传感器232检测到膜片本体13恢复最初状态,则此时另一组第二电磁阀2316及时关闭,避免另一组密封筒2313内气体流失,从而可使两组活塞杆2314同时保持静止状态,通过对曲轴235摆动角度的微调,配合激光位移传感器232的精准测距,可使膜片本体13的张力维持在一个很小范围,可有效避免膜片本体13因过度拉扯发生形变或者因未绷紧而出现褶皱,提高了镀膜的均匀性和一致性。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。