技术特征:
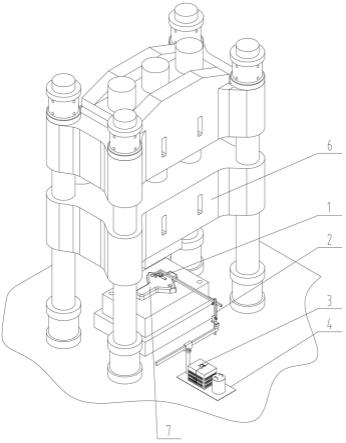
1.锻造视觉协同喷涂方法,其特征在于,包括如下步骤:建立锻造喷涂系统的运行坐标系;在锻造喷涂系统中输入当前喷涂锻件的相关信息和三维模型,根据相关信息和三维模型确定喷涂方案,在确定喷涂方案时,根据锻件的外形特征将喷涂锻件划分为若干子区域,所述子区域包含常规区域和异形区域,先确定出异形区域的喷涂路线后,依据异形区域的喷涂路线确定出常规区域的喷涂线路;在锻造喷涂系统上设置视觉成像仪器,通过视觉成像仪器检测锻件,确定出锻件在锻造喷涂系统的运行坐标系中的位置,根据锻件在锻造喷涂系统的运行坐标系中的位置,将三维模型匹配到锻造喷涂系统的运行坐标系中;按照三维模型上确定的喷涂方案对锻件进行喷涂。2.如权利要求1所述的锻造视觉协同喷涂方法,其特征在于:在具有长轴的异形区域中,以异形区域的长轴走向作为异形区域的喷涂路线的走向,使常规区域的喷涂路线的走向与异形区域的喷涂路线的走向一致。3.如权利要求1所述的锻造视觉协同喷涂方法,其特征在于:所述锻造喷涂系统中配备有至少两种喷涂材料,在确定喷涂方案时,确定选用的喷涂材料。4.如权利要求2所述的锻造视觉协同喷涂方法,其特征在于:所述锻造喷涂系统上与喷嘴(102)并列设置有第一激光检测仪(1001)和第二激光检测仪(1002),所述第一激光检测仪(1001)位于喷嘴(102)的运动方向的前方,所述第二激光检测仪(1002)位于喷嘴(102)的运动方向的后方;在锻造喷涂系统对锻件进行喷涂时,通过锻件同一位置上第一激光检测仪(1001)和第二激光检测仪(1002)的测距差值计算出喷涂的涂层厚度,通过调整喷嘴(102)出料速度或者喷嘴(102)的移动速度实时调整涂层厚度。5.如权利要求1所述的锻造视觉协同喷涂方法,其特征在于:在三维模型中选取至少3个不在一条直线上的特征点,通过视觉成像仪器检测锻件,在锻件上确定出对应的特征点位置,通过锻件上的特征点与三维模型上的特征点的匹配,将三维模型匹配到锻造喷涂系统的运行坐标系中,以确定出锻造喷涂系统与锻件的相对位置。6.如权利要求1所述的锻造视觉协同喷涂方法,其特征在于:创建信息库,记录三维模型和对应的喷涂方案;在根据三维模型确定喷涂方案时,将当前喷涂锻件的三维模型与信息库中记录的三维模型进行对比,查找信息库中相同或者相似的三维模型,直接采用信息库中对应的喷涂方案或者在对应的喷涂方案的基础上进行修改。7.如权利要求6所述的锻造视觉协同喷涂方法,其特征在于:在信息库中记录子区域喷涂方案,子区域喷涂方案包括异形区域的喷涂方案、异形区域与常规区域衔接的喷涂方案以及异形区域与异常区域之间衔接的喷涂方案;根据锻件的外形特征将喷涂锻件划分出子区域后,将当前划分出的子区域与信息库记录的子区域喷涂方案进行对比,查找信息库中相同或者相似的子区域,直接采用信息库中对应的喷涂方案或者在对应的喷涂方案的基础上进行修改。8.如权利要求1所述的锻造视觉协同喷涂方法,其特征在于,所述锻造喷涂系统包括喷涂单元(1)、调整单元(2)、供料单元(3)、底座和控制单元(5),所述喷涂单元(1)通过调整单
元(2)设置于底座上,所述喷涂单元(1)通过管道与供料单元(3)相连接,所述调整单元(2)包括位置调整机构和角度调整机构(204),所述喷涂单元(1)通过角度调整机构(204)连接于位置调整机构上,所述位置调整机构包括水平纵向调整机构、水平横向调整机构以及竖向调整机构,所述水平纵向调整机构、水平横向调整机构、竖向调整机构、角度调整机构(204)以及喷涂单元(1)均与控制单元(5)相连接。9.如权利要求8所述的锻造视觉协同喷涂方法,其特征在于,所述底座为固定底座(401),所述水平横向调整机构为沿水平横向布置的第一伸缩杆(201),所述竖向调整机构为沿竖向布置的第二伸缩杆(202),所述水平纵向调整机构为沿水平纵向布置的第三伸缩杆(203),所述第一伸缩杆(201)连接于固定底座(401)上,所述第二伸缩杆(202)连接于第一伸缩杆(201)上,所述第三伸缩杆(203)连接于第二伸缩杆(202)上。10.如权利要求8所述的锻造视觉协同喷涂方法,其特征在于,所述底座为活动底座(402),所述活动底座(402)下方沿水平纵向设置有轨道(403),所述活动底座(402)通过行走驱动机构架设于轨道(403)上形成水平纵向调整机构,所述水平横向调整机构包括沿水平横向设置的第四伸缩杆(206)和第六伸缩杆(208),所述竖向调整机构为沿竖向布置的第五伸缩杆(207),所述第四伸缩杆(206)连接于活动底座(402)上,所述第五伸缩杆(207)连接于第四伸缩杆(206)上,所述第六伸缩杆(208)连接于第五伸缩杆(207)杆上,所述喷涂单元(1)通过角度调整机构(204)连接于第六伸缩杆(208)上。
技术总结
本发明属于锻造喷涂控制技术领域,公开了一种锻造视觉协同喷涂方法。本发明公开的锻造视觉协同喷涂方法,包括如下步骤:建立锻造喷涂系统的运行坐标系;在锻造喷涂系统中输入当前喷涂锻件的相关信息和三维模型,根据相关信息和三维模型确定喷涂方案;在锻造喷涂系统上设置视觉成像仪器,通过视觉成像仪器检测锻件,确定出锻件在锻造喷涂系统的运行坐标系中的位置,根据锻件在锻造喷涂系统的运行坐标系中的位置,将三维模型匹配到锻造喷涂系统的运行坐标系中;按照三维模型上确定的喷涂方案对锻件进行喷涂。该锻造视觉协同喷涂方法既能有效提高喷涂效率,又能保证喷涂质量。又能保证喷涂质量。又能保证喷涂质量。
技术研发人员:苏振华 刘胜涛 郑建能 王少江 孟斌
受保护的技术使用者:国机重型装备集团股份有限公司
技术研发日:2022.10.19
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。