1.本发明属于卫星通信技术领域,具体涉及一种卫星天线在倾斜状态下的寻星控制方法。
背景技术:
2.在卫星天线设备自动寻星扫描过程中,为了能够快速锁定目标卫星,往往大多数情况下是将卫星天线设备置于地势相对比较平整的空旷地带。但在特殊或紧急的情况下,需要在地势不平整,尤其是天线设备摆放后左右不平的情况下进行自动寻星,若还是按照平地上的寻星方法来自动寻星,则很难快速搜索到目标卫星信号,甚至根本搜索不到卫星信号。
3.专利号cn104681986b引入修正天线姿态的思想,即天线在左右不同倾斜状态下,方位电机向左或向右运动固定步长后,通过控制俯仰电机运动来修正俯仰角度,从而实现倾斜寻星。该方法存在这样的问题:在方位左右运动时,由于地势左右倾斜,俯仰角相应地也随着方位的变化在不停的变大或变小,即在同时存在两个变量,故在自动寻星扫描中很难搜索到卫星信号。
技术实现要素:
4.本发明的目的在于提供一种卫星天线在倾斜状态下的寻星控制方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种卫星天线在倾斜状态下的寻星控制方法,包括如下步骤:1)根据定位模块获取当地坐标的经纬度信息,并结合所需搜索的卫星经度参数计算出理论方位角、理论俯仰角、理论极化角;2)天线从理论角度位置进行“回”字形自动寻星;3)当天线处于倾斜状态,天线进行多段方位旋转,每段旋转后俯仰电机驱动天线使天线保持与旋转前俯仰角度相同。
6.优选的,所述理论方位角计算公式为:;所述理论俯仰角计算公式为:所述理论极化角计算公式为:
;其中,为卫星轨位经度,为当地坐标经度,为当地坐标纬度。
7.优选的,所述步骤2)中,天线分别先后控制方位电机、俯仰电机、极化电机运动各自相应的理论角度位置附近,开始进行“回”字形自动寻星扫描。
8.优选的,所述“回”字形自动寻星扫描是以理论方位角为中心方位电机进行范围扫描,以理论俯仰角为中心俯仰电机进行范围扫描,围绕着理论方位角和理论俯仰角进行“右-上-左-下-右-...”式的周期性扫描;在扫描的过程中,天线同时监测和采集内部系统运行的参数,包括实时方位角、俯仰角、实时采集信号agc值等,当采集到的实时信号agc值大于预设的门限值agcs,则进行十字调整精搜索,从而实现精确锁定卫星。
9.优选的,当天线检测到方位电机运动到最左/右端读取到的俯仰角,与方位电机运动到最右/左端时的俯仰角存在一定差值,则进入倾斜寻星流程。
10.优选的,将方位电机运动范围的最左端记为azf,最右端记为azr,整个方位范围记为[azf,azr],在区间[azf,azr]插入若干分点n-1(n》1且为正整数),并使azf《az1《az2《
…
《az
n-1
《azr,形成n个小区间[azf,az1],(az1,az2],...,(az
n-1
,azr];方位电机先从azf点运动到az1点后停止,驱动俯仰电机运动调整俯仰角度恢复到azf点时的角度值;再从az1点,运动到az2点,并调整俯仰角度,依次类推;方位电机在每个小区间运动完后,都会驱动俯仰电机运动来调整俯仰角度,使俯仰角度恢复到该区间开始时的俯仰角度,使得俯仰调整的整个过程中与平地寻星相同。
[0011]
本发明的技术效果和优点:在天线在左右倾斜情况下寻星时,根据俯仰角度偏差,对方位角度范围进行的离散化处理,有效减小方位运动时对天线俯仰角度的影响,从而保证了在方位角度改变时,及时修正俯仰角度偏差。使得在自动寻星扫描中,很容易地搜索到卫星信号,提高寻星效率,大大地降低了对寻星场地的要求。
附图说明
[0012]
图1是“回”字形自动寻星扫描流程;图2是“回”字形自动寻星扫描方位电机和俯仰电机运动示意图;图3是倾斜寻星扫描时,俯仰调整流程;图4是倾斜寻星扫描时,未经俯仰调整俯仰角度、经俯仰区间化调整后的俯仰角度值、平地时俯仰角度值,随方位电机运动而变化的情况示意图;图5是举例示意的未经俯仰调整俯仰角度、经俯仰区间化调整后的俯仰角度值、平地时俯仰角度值随方位电机运动而变化的情况示意图。
具体实施方式
[0013]
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
[0014]
卫星天线工作原理为:卫星天线接收面接收卫星发出的信号,经过变频后,转换成
中频信号送至信号采集模块(信标/载波接收机)并输出数字信号。卫星天线中的控制器实时采集信标/载波接收机的数字信号(agc值),若agc值为0或小于门限值agcs,则认为未搜索到目标卫星,否则认为锁定该卫星。在寻星前,需获取当地的经纬度信息、选择目标卫星及极化方式、设置信标/载波接收机频率、设置门限值agcs等。
[0015]
在天线接收到寻星指令后,首先天线根据北斗/gps等定位模块获取当地经纬度信息和卫星信息,通过理论方位角计算公式:;理论俯仰角计算公式:理论极化角计算公式:;其中,为卫星轨位经度,为当地坐标经度,为当地坐标纬度;计算出理论方位角度、理论俯仰角度、理论极化角度(若为圆极化,则无);然后控制方位电机运动到理论方位角度位置,再控制俯仰电机运动到理论俯仰角度位置,最后控制极化电机运动到理论极化角度位置,进入如图1所示的“回”字形寻星流程。
[0016]
在“回”字形自动寻星扫描时,方位电机在以理论方位角为中心的
±
30度范围进行扫描,俯仰电机在以理论俯仰角为中心的
±
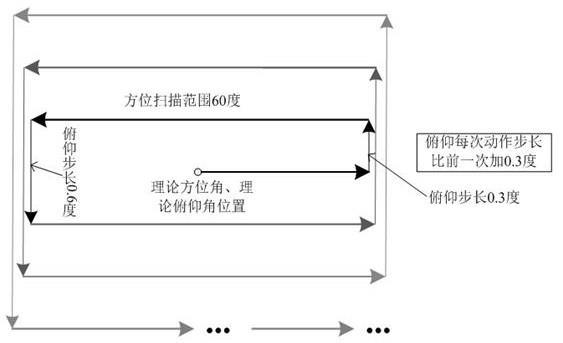
5度范围进行扫描,极化电机保持不动;具体过程为:在方位电机和俯仰电机分别运动到各自理论角度位置后,保持俯仰电机不动,方位电机向右运动30度;俯仰电机向上抬0.3度,方位保持电机不动;保持俯仰电机不动,方位电机向左运动60度;俯仰电机向下降0.6度,方位保持电机不动;保持俯仰电机不动,方位电机向右运动60度。每次俯仰电机运动步长比前一次多0.3度,方位扫描范围为60度,天线以此进行“右-上-左-下-右-...”式的周期性扫描,如图2(图中,横向为方位电机运动轨迹示意,纵向为俯仰电机运动轨迹示意)。同时实时采集信标/载波接收机数据,当采集到的实时信号agc值大于预设的门限值agcs,则进行十字调整精搜索,从而实现精确锁定卫星。
[0017]
检测天线是否倾斜,在扫描的第一个周期,当天线检测到方位电机在最左/右端(俯仰上抬一定步长后)读取到的俯仰角,与方位电机运动到最右/左端时的俯仰角存在一定差值δel(图4中
①
与
③
的差值),判断天线倾斜,则进入倾斜寻星流程。
[0018]
如图3,倾斜寻星扫描时,俯仰调整流程为:在进行倾斜寻星时,将方位电机运动范围分成n个小区间(如图4),方位电机运动范围的最左端记为azf,最右端记为azr,整个方位范围记为[azf,azr],在区间[azf,azr]插入若干分点n-1(n》1且为正整数),并使azf《az1《az2《
…
《az
n-1
《azr,形成n个小区间[azf,az1],(az1,az2],...,(az
n-1
,azr],方位电机每个小区间进行间歇性运动,并及时调整俯仰角度,使得方位电机在运动完整个扫描范围后,俯仰角度的变化量保持在一个很小的范围内。如图5,这里选择天线向左倾斜(左低右高),方位电机向右扫描为列来说明。图5中,随着方位电机向右运动,将方位电机运动范围[azf,azr]分成
了5份,分别是[azf,n1],(n1,n2],(n2,n3],(n3,n4],(n4,azr];当方位电机从左向右扫描时,先运动到n1点后停止,这时,虽然俯仰电机未运动,但由于天线向左倾斜,俯仰角度会随着方位的右移而变大(以线性变化为例),所以根据实时采集到的俯仰角度,驱动俯仰电机向下运动降低俯仰角至初始时的角度(在azf点时的角度);然后方位电机继续从n1点运动到n2点后停止,同理,降低俯仰角至初始时的角度,以此类推,当方位电机每运动完一个小区间后,都会根据实时采集到的俯仰角度,驱动俯仰电机向下运动将俯仰角至初始时的角度位置;当方位电机运动完全部的小区间后,即相当于方位电机完成从左向右的扫描,而的变化始终保持在一个很小的范围,如图4-所示。对比图4-图,我们可以很容易的看出,在倾斜情况下寻星时,随着方位角度的改变,图4-图中的俯仰角始终保持在一个很小的范围内变化,使得整个寻星过程类似平地寻星一样大大地降低了俯仰对方位扫描的影响,从而自动寻星扫描中很容易地搜索到卫星信号,提高寻星效率,大大地降低了对寻星场地的要求。
[0019]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
