技术特征:
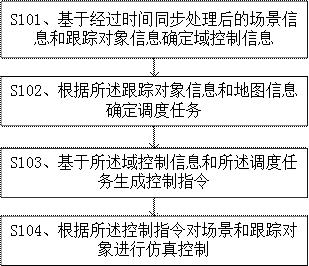
1.一种仿真方法,其特征在于,所述方法包括:基于经过时间同步处理后的场景信息和跟踪对象信息确定域控制信息;根据所述跟踪对象信息和地图信息确定调度任务;基于所述域控制信息和所述调度任务生成控制指令;根据所述控制指令对场景和跟踪对象进行仿真控制。2.如权利要求1所述的方法,其特征在于,所述基于经过时间同步处理后的场景信息和跟踪对象信息确定域控制信息,包括:基于场景信息的时间戳和跟踪对象信息的时间戳确定场景信息的时间间隔补偿;基于所述时间间隔补偿更新所述场景信息的时间戳;基于更新过时间戳的场景信息和跟踪对象信息确定域控制信息。3.如权利要求1或2所述的方法,其特征在于,所述方法还包括:获取特定场景下的特定场景信息;基于所述特定场景信息仿真生成特定场景。4.一种仿真系统,其特征在于,所述系统包括:场景仿真平台、跟踪对象仿真平台、域控制平台和云调度管理平台;其中,所述场景仿真平台用于基于场景信息生成仿真场景以及将所述场景信息发送给所述跟踪对象仿真平台;所述跟踪对象仿真平台用于基于跟踪对象信息生成对跟踪对象的仿真、接收所述场景信息并将所述场景信息和所述跟踪对象信息经过时间同步处理后发送给所述域控制平台以及接收所述域控制平台发送的控制指令并基于所述控制指令在所述仿真场景中对跟踪对象进行仿真控制;所述域控制平台用于基于经过时间同步处理后的所述场景信息和所述跟踪对象信息确定域控制信息、接收所述云调度管理平台下发的调度任务以及基于所述调度任务和所述域控制信息生成控制指令并下发所述控制指令到所述跟踪对象仿真平台;所述云调度管理平台用于基于所述跟踪对象信息和地图信息向所述域控制平台发送所述调度任务。5.如权利要求4所述的系统,其特征在于,所述跟踪对象仿真平台将经过时间同步处理后的所述场景信息和所述跟踪对象信息发送给域控制平台,包括:跟踪对象仿真平台基于场景信息的时间戳和跟踪对象信息的时间戳确定场景信息的时间间隔补偿;跟踪对象仿真平台基于所述时间间隔补偿更新所述场景信息的时间戳;跟踪对象仿真平台将更新过时间戳的场景信息和跟踪对象信息发送给域控制平台。6.如权利要求4或5所述的系统,其特征在于,所述场景仿真平台包括:仿真场景编辑模块、仿真场景渲染模块、仿真场景还原模块、点云源数据模块、真值传感器源数据模块、目标物元素库模块,所述系统还包括:通过所述仿真场景编辑模块编辑搭建生成仿真场景;通过所述目标物元素库模块在所述仿真场景中配置目标物元素;通过所述点云源数据模块和所述真值传感器源数据模块分别模拟点云源数据和真值传感器源数据;
所述仿真场景渲染模块基于所述点云源数据和真值传感器源数据对所述仿真场景进行渲染。7.如权利要求4或5所述的系统,其特征在于,所述域控制平台包括:感知定位模块、决策规划模块、运动控制模块、第一诊断监控模块,所述系统还包括:所述感知定位模块基于所述同步后的所述场景信息和所述跟踪对象信息进行训练并将训练结果发送到所述决策规划模块;所述决策规划模块根据所述训练结果规划所述跟踪对象的运行轨迹;所述运动控制模块基于所述运行轨迹确定所述跟踪对象的控制指令;所述第一诊断监控模块监控所述跟踪对象的运行状态,并将所述跟踪对象运行状态的异常信息发送给所述云调度管理平台。8.如权利要求4或5所述的系统,其特征在于,所述云调度管理平台包括:地图模块、第二诊断监控模块、调度规划模块、数据管理模块,所述系统还包括:所述地图模块根据所述域控制平台发送的地图地形更新信息更新地图信息;所述调度规划模块根据所述地图信息和所述跟踪对象的状态发送全局规划信息和调度任务给所述域控制平台;所述第二诊断监控模块监控所述跟踪对象,并将所述跟踪对象的故障信息发送给所述数据管理模块;所述数据管理模块存储和记录所述故障信息。9.如权利要求8所述的系统,其特征在于,所述场景仿真平台还包括仿真场景还原模块,所述仿真系统还包括现场跟踪对象,所述系统还包括:所述现场跟踪对象获取特定场景下的特定场景信息;将所述特定场景信息发送给所述数据管理模块;所述仿真场景还原模块基于所述数据管理模块中的所述特定场景信息生成特定场景。10.一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于使所述计算机执行根据权利要求1-3中任一项所述的方法。11.一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1至3中任一项所述的方法。
技术总结
本申请提供一种仿真方法、系统及其存储介质和电子设备,基于经过时间同步处理后的场景信息和跟踪对象信息确定域控制信息,根据所述跟踪对象信息和地图信息确定调度任务,基于所述域控制信息和所述调度任务生成控制指令,根据所述控制指令对场景和跟踪对象进行仿真控制,实现了对场景和跟踪对象信息的高度同步化,提升了测试、仿真的精确性,从而对于无人驾驶、自动驾驶领域中无人车的准确控制提供了很好的参考。好的参考。好的参考。
技术研发人员:赵鑫全
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:2022.10.19
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。