技术特征:
1.一种医疗用移动体系统,包括用于容纳各种疾病患者的医疗用移动体,其特征在于,所述医疗用移动体系统包括:所述医疗用移动体;机器人,其具备臂,所述臂具有用于保持医疗检查器具和/或医疗诊察器具的手部;操作器,其被构成为操作所述机器人;以及控制装置,所述机器人被配置在所述医疗用移动体内部的第一空间中,所述操作器被配置在与所述第一空间隔离的第二空间中,所述控制装置被构成为执行:a,其使所述机器人自走以接近所述患者;以及b,其在执行所述a之后,根据从所述操作器输入的所述臂和/或所述手部的操作指令信息,使所述臂和/或所述手部动作。2.根据权利要求1所述的医疗用移动体系统,其特征在于,所述医疗用移动体系统还包括:第一摄影装置;以及第一显示装置,其被构成为显示所述第一摄影装置所拍摄的图像信息和/或影像信息,所述控制装置被构成为,在使所述第一显示装置显示所述第一摄影装置所拍摄的图像信息和/或影像信息的状态下,执行所述b。3.根据权利要求1或2所述的医疗用移动体系统,其特征在于,所述机器人还具备第一声音输入装置和第一声音输出装置,在所述第二空间中还配置有第二声音输入装置和第二声音输出装置,所述控制装置被构成为将输入到所述第一声音输入装置的声音信息输出到所述第二声音输出装置,并将输入到所述第二声音输入装置的声音信息输出到所述第一声音输出装置。4.根据权利要求1至3中任一项所述的医疗用移动体系统,其特征在于,所述机器人还具备用于收纳药、饮食、检查用试剂、样本、医疗检查器具以及医疗诊察器具中的至少一个输送品的收纳装置。5.根据权利要求1至4中任一项所述的医疗用移动体系统,其特征在于,还包括与所述第一空间和所述第二空间隔离的第三空间,在所述第三空间中对所述机器人进行消毒。6.根据权利要求5所述的医疗用移动体系统,其特征在于,所述机器人被构成为对该机器人自身进行消毒。7.根据权利要求5所述的医疗用移动体系统,其特征在于,在所述第三空间中配置有被构成为对所述机器人进行消毒的消毒装置。8.根据权利要求5至7中任一项所述的医疗用移动体系统,其特征在于,所述控制装置被构成为在所述b之后,使所述机器人自走到所述第三空间并进一步执行对该机器人进行消毒的c。9.根据权利要求1至8中任一项所述的医疗用移动体系统,其特征在于,所述机器人还具备第二显示装置,在所述第二空间中还配置有第二摄影装置,
并且所述控制装置被构成为,在所述b中使所述第二显示装置显示所述第二摄影装置所拍摄的图像信息和/或影像信息。10.根据权利要求1至9中任一项所述的医疗用移动体系统,其特征在于,所述机器人和所述操作器由主从方式构成。11.根据权利要求1至10中任一项所述的医疗用移动体系统,其特征在于,在所述手部上以从该激光指示器照射的光交叉的方式配置有一对激光指示器。12.根据权利要求2至11中任一项所述的医疗用移动体系统,其特征在于,所述第一摄影装置被配置在所述机器人上。13.根据权利要求2至12中任一项所述的医疗用移动体系统,其特征在于,所述第一显示装置被构成为显示用于表示所述医疗检查器具和/或所述医疗诊察器具的位置信息的虚拟模型。14.根据权利要求2至13中任一项所述的医疗用移动体系统,其特征在于,所述第一显示装置被构成为显示患者的医疗行为对象部位的虚拟模型。15.根据权利要求1至14中任一项所述的医疗用移动体系统,其特征在于,在所述操作器中配置有操作开关,所述操作开关被构成为指示解除对所述医疗检查器具和/或所述医疗诊查器具的保持。16.一种医疗用移动体系统,包括用于容纳各种疾病患者的医疗用移动体,其特征在于,所述医疗用移动体系统包括:所述医疗用移动体;机器人,其具备臂,所述臂具有用于保持医疗检查器具和/或医疗诊察器具的手部;操作器,其被构成为操作所述机器人;以及控制装置,所述机器人被配置在所述医疗用移动体内部的第一空间中,所述操作器被配置在与所述第一空间隔离的第二空间中,在所述手部配置有第一摄影装置,所述控制装置被构成为执行α,所述α根据从所述操作器输入的所述臂和/或所述手部的操作指令信息,使所述臂和/或所述手部动作。17.根据权利要求1至16中任一项所述的医疗用移动体系统,其特征在于,所述医疗用移动体为医院船。18.一种医疗用移动体系统的运行方法,所述医疗用移动体系统包括用于容纳各种疾病患者的医疗用移动体,其特征在于,所述医疗用移动体系统包括:所述医疗用移动体;机器人,其具备臂,所述臂具有用于保持医疗检查器具和/或医疗诊察器具的手部;操作器,其被构成为操作所述机器人;以及操作器,其被构成为操作所述机器人,所述机器人被配置在所述医疗用移动体内部的第一空间中,所述操作器被配置在与所述第一空间隔离的第二空间中,
并且包括:a,其根据从所述操作器输入的患者的位置信息,使所述机器人自动移动到所述患者附近;以及b,其在执行所述a之后,根据从所述操作器输入的所述臂和/或所述手部的操作指令信息,使所述臂和/或所述手部动作。
技术总结
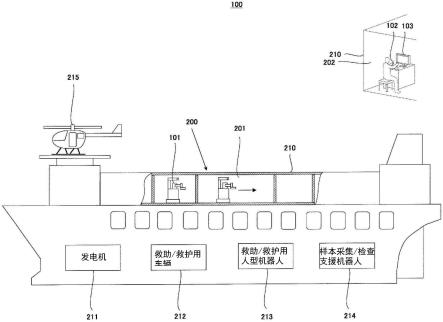
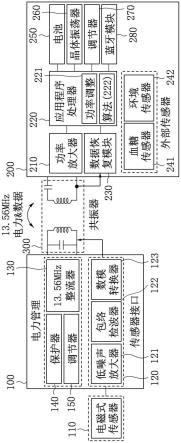
本发明所涉及的医疗用移动体系统包括医疗用移动体(200)、机器人(101)、操作器(102)以及控制装置(110),机器人(101)被配置在第一空间(201)内,操作器(102)被配置在第二空间(202)中,控制装置(110)被构成为执行:A,其使机器人(101)自走以接近患者;以及B,其在执行A之后,使臂(13)和/或手部(18)动作。使臂(13)和/或手部(18)动作。使臂(13)和/或手部(18)动作。
技术研发人员:桥本康彦 龟山笃 扫部雅幸
受保护的技术使用者:川崎重工业株式会社
技术研发日:2021.04.07
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。