1.本发明涉及机场牵引车领域,尤其是一种机场无人驾驶视觉检测系统及行李牵引车。
背景技术:
2.应用推广机场无人驾驶设备是贯彻民航智慧发展主线的具体体现,是推进四型机场建设的有效举措,是建设多领域民航强国的实现路径。机场无人驾驶设备的应用是为平安机场建设提供重要保障,是有效预防人因失误、违规作业,解决机坪刮碰、防范跑道侵入等不安全事件的有效手段;行李牵引车作为民航机场18种地面运输保障车辆之一,无人化改造必不可少,对于l2、l3、l4、l4.5级别的无人驾驶,还通过摄像头与雷达共同作用实现车辆的精准转向、制动、加速、变道、超车、变道指示,现有技术中,民用车用于无人驾驶的摄像头固定安装在驾驶内挡风玻璃,不能直接应用在机场的行李牵引车中,在机场内,由于特种车辆比较多,需要经常对用于视觉检测的摄像头进行升级和更换,显然现有技术中民用车辆的摄像头安装结构无法应用在机场特种车辆上。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例,在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述和/或现有技术中所存在的问题,提出了本发明。
5.因此,本发明所要解决的技术问题是现有技术中,民用车用于无人驾驶的摄像头固定安装在驾驶内挡风玻璃,不能直接应用在机场的行李牵引车中,在机场内,由于特种车辆比较多,需要经常对用于视觉检测的摄像头进行升级和更换,显然现有技术中民用车辆的摄像头安装结构无法应用在机场特种车辆上。
6.为解决上述技术问题,本发明提供如下技术方案:一种机场无人驾驶视觉检测系统,包括, 安装组件,所述安装组件连接有连接柱;安装组件包括固定在所述驾驶室内的固定筒,所述固定筒连接有连接柱,还包括摄像头,所述摄像头安装在连接柱一端。
7.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述固定筒开口一端设置有第一半环件,所述第一半环件端部设置有第一挡圈;所述固定筒内活动连接有卡接筒,所述卡接筒靠近第一半环件的一端连接有第二半环件,所述第二半环件端部设置有第二挡圈;所述连接柱一端设置有圆台,所述圆台直径大于第一挡圈、第二挡圈内径。
8.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述固定筒内侧设置有螺旋槽,所述卡接筒外侧设置有凸台,所述凸台嵌入所述螺旋槽内。
9.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述固定筒
内远离第一半环件的一端面设置有弹簧槽,所述弹簧槽与卡接筒之间设置有第一弹簧。
10.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述凸台设置有沿卡接筒径向延伸的第一通孔,所述第一通孔内设置有第一限位槽,所述第一通孔内设置有限位销,所述限位销位于第一限位槽内的一端设置有第一限位块,所述第一限位块与第一限位槽之间设置有第二弹簧;所述螺旋槽靠近第一半环件的一端沿轴向延伸形成长槽,所述长槽的端部设置有沿径向贯穿的第二通孔。
11.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述第二通孔内设置有第二柱形槽,第二通孔内设置复位销,所述复位销位于第二柱形槽内的部分设置有第二限位块,第二限位块与第二柱形槽靠近卡接筒的一端面之间设置有第三弹簧。
12.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述卡接筒内侧两端均设置有凸块,凸块设置有贯穿的第三通孔,第三通孔内设置有锁紧杆,锁紧杆位于两个凸块之间的部分设置有挡块,挡块与靠近弹簧槽的一个凸块之间设置有第四弹簧,锁紧杆位于第二半环件一侧的端部设置有斜面形成楔形;卡接筒内侧沿轴线设置有导向槽,挡块设置有嵌入导向槽内的限位凸起;所述第三通孔、锁紧杆设置在卡接筒连接第二半环件的一侧。
13.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:所述固定筒内远离第一半环件的一端面设置有弹簧孔,所述弹簧孔内设置有卡销,所述卡销与弹簧孔之间固定连接有第五弹簧。
14.作为本发明所述机场无人驾驶视觉检测系统的一种优选方案,其中:还包括视觉处理模块、车辆控制模块、转向模块,所述视觉处理模块、转向模块均与车辆控制模块连接,所述摄像头连接至视觉处理模块;所述摄像头、视觉处理模块根据获取的图像信息得到车的运动信息;所述转向模块与车辆控制模块连接,所述转向模块根据所述控制模块的控制信号控制转动角度;所述车辆控制模块还连接驱动模块,所述驱动模块根据所述控制模块的控制信号控制行驶速度;所述视觉处理模块连接有显示模块,所述显示模块显示车的运动信息;还包括外部控制模块,与所述车辆控制模块连接,所述外部控制模块用于控制所述车辆控制模块的开启和关闭。
15.本发明还要解决的技术问题是:目前的机场特种车辆都还灭有普及无人驾驶。
16.为解决上述技术问题,本发明提供如下技术方案:一种行李牵引车,其中:还包括牵引车,所述机场无人驾驶视觉检测系统安装在所述牵引车。
17.本发明的有益效果:基于现有的底盘技术及动态性能,通过无人驾驶升级与改造,实现了人工、无人驾驶模式的自由选择与柔性切换,实现机场环境下l4.5的无人驾驶;利用安装组件用于视觉检测的摄像头进行安装,操作方便,易于安装、拆卸、更换。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用
的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:图1为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件、连接柱以及摄像头的示意图;图2为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件的结构示意图;图3为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中固定筒的结构示意图;图4为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件的剖面结构示意图;图5为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件与连接柱连接初始状态的结构示意图;图6为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件与连接柱连接完成的结构示意图;图7为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统中安装组件与连接柱连接摄像头结构示意图;图8为本发明提供的一种实施例所述的机场无人驾驶视觉检测系统的示意图。
具体实施方式
19.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
20.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
21.其次,本发明结合示意图进行详细描述,在详述本发明实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
22.再其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
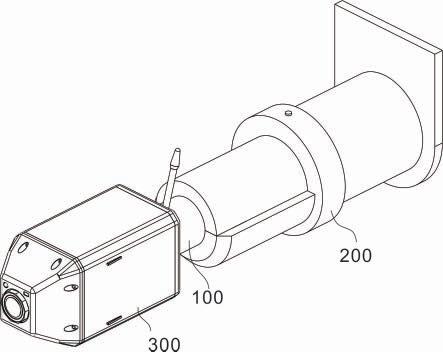
23.实施例1参照图1,本实施例提供了一种机场无人驾驶视觉检测系统,包括安装组件100,安装组件100连接有连接柱300;还包括摄像头200,摄像头200即为无人驾驶中视觉检测所采用的装置。
24.其中,安装组件100固定案子在挡风玻璃上部的内侧,安装组件100包括固定在驾驶室内的固定筒101、与固定筒101连接的连接柱300,摄像头200安装在连接柱300一端。固定筒101为圆筒形,固定筒101开口一端设置有第一半环件101a,第一半环件101a即为一半的筒形,第一半环件101a端部设置有第一挡圈101b;第一挡圈101b由第一半环件101a端部
向轴心延伸形成,其中固定筒101内活动连接有卡接筒102,卡接筒102为圆筒形,其能够在固定筒101内沿轴向移动,卡接筒102靠近第一半环件101a的一端连接有第二半环件102a,第二半环件102a同样为圆筒的一半,第二半环件102a端部设置有第二挡圈102b;第二挡圈102b由第二半环件102a端部向轴心延伸形成,第二挡圈102b的内径与第一挡圈101b的内径一致,当第二半环件102a与第一半环件101a端部齐平时,第一挡圈101b与第二挡圈102b形成环形圈。
25.进一步的,与环形圈相对应的是,连接柱300一端设置有圆台301,圆台301直径大于第一挡圈101b、第二挡圈102b内径。即圆台301位于第二半环件102a、第一半环件101a内部时,第一挡圈101b与第二挡圈102b将圆台301限制在内部,完成固定连接。
26.其中,固定筒101内侧设置有螺旋槽101c,螺旋槽101c沿螺旋线延伸形成,且螺旋槽101c的圈数为0.5圈,卡接筒102外侧设置有凸台102c,凸台102c嵌入螺旋槽101c内。因此,卡接筒102在固定筒101内的运动为螺旋运动,初始状态下,卡接筒102除了第二半环件102a、第二挡圈102b的其余部分都位于固定筒101内,且凸台102c在螺旋槽101c的起始端,此时,第二半环件102a、第二挡圈102b形成的半圆槽朝外部,此时可以将圆台301放在第二半环件102a、第二挡圈102b内。圆台301的两端面分别与第二半环件102a、第二挡圈102b端面接触。
27.进一步的,固定筒101内远离第一半环件101a的一端面设置有弹簧槽101h,弹簧槽101h与卡接筒102之间设置有第一弹簧103。第一弹簧103为压力弹簧,在第一弹簧103的作用下,推动卡接筒102使其螺旋运动,在移动过程中,第二半环件102a进行翻转,直至凸台102c移动至螺旋槽101c另一端,此时第二半环件102a恰好翻转180
°
,且圆台301位于第二半环件102a、第一半环件101a组成的圆槽内,且此时第二半环件102a端面与第一挡圈101b的内端面重合。
28.较佳的,螺旋槽101c靠近第一半环件101a的一端沿轴向延伸形成长槽101g,即此时在第一弹簧103的作用下,卡接筒102开始沿沿直线运动,直至凸台102c移动至长槽101g末端,此时第一挡圈101b与第二挡圈102b内外两端面均重合,第一挡圈101b、第二挡圈102b形成环形圈将圆台301固定在固定筒101内部。
29.进一步的,凸台102c设置有沿卡接筒102径向延伸的第一通孔102d,第一通孔102d内设置有第一限位槽102e,第一限位槽102e直径大于第一通孔102d直径,第一通孔102d内设置有限位销104,限位销104位于第一限位槽102e内的一端设置有第一限位块104a,第一限位块104a与第一限位槽102e之间设置有第二弹簧105;在弹簧的作用下,限位销104具有向远离卡接筒102中心运动的趋势。
30.相应的,所述长槽101g的端部设置有沿径向贯穿的第二通孔101d,因此,一旦凸台102c移动至长槽101g末端,限位销104就在弹簧的作用下弹出并嵌入第二通孔101d内,将卡接筒102位置进行固定,进而“锁死”连接柱。
31.较佳的,第二通孔101d内设置有第二柱形槽101e,第二柱形槽101e直径大于第二通孔101d内径,第二通孔101d内设置复位销106,复位销106位于第二柱形槽101e内的部分设置有第二限位块106a,第二限位块106a与第二柱形槽101e靠近卡接筒102的一端面之间设置有第三弹簧107,即在第三弹簧107的作用下,复位销106是远离卡接筒102的;当需要取下连接柱时,按下复位销106,复位销106一端推动限位销104使其收缩至凸台102c内,然后
将卡接筒102向固定筒101内部按压,至卡接筒102翻转180
°
,即可取出连接柱。
32.较佳的,卡接筒102内侧两端均设置有凸块102f,凸块102f设置有贯穿的第三通孔102g,其中第三通孔102g靠边设置,第三通孔102g内设置有锁紧杆108,锁紧杆108所在位置应当满足:在圆台301放入第二半环件102a的过程中,圆台301大部分位于第二半环件102a内后与锁紧杆108接触。
33.其中,锁紧杆108位于两个凸块102f之间的部分设置有挡块108a,挡块108a与靠近弹簧槽101h的一个凸块102f之间设置有第四弹簧108b,在弹簧的作用下,锁紧杆108的一端位于第二半环件102a的空间内。锁紧杆108位于第二半环件102a一侧的端部设置有斜面108c形成楔形;即斜面108c一端位于第二半环件102a的空间内。第三通孔102g、锁紧杆108设置在卡接筒102连接第二半环件102a的一侧。
34.相应的,固定筒101内远离第一半环件101a的一端面设置有弹簧孔101f,弹簧孔101f内设置有卡销109,卡销109与弹簧孔101f之间固定连接有第五弹簧109a。在弹簧的作用下,推动卡销109具有向卡接筒102方向移动的趋势,初始状态下即安装连接柱前,卡销109与第三通孔102g同轴,此时,卡销109一端嵌入第三通孔102g内,因此可以限制卡接筒102转动,较佳的,卡接筒102内侧沿轴线设置有导向槽102h,挡块108a设置有嵌入导向槽102h内的限位凸起。
35.本实施例中,当开始安装连接柱300时,首先将圆台301放置在第二半环件102a中,在放置的过程中,圆台301与斜面108c接触并推动锁紧杆108,锁紧杆108又推动卡销109使卡销109从第三通孔102g内脱离,接着在第一弹簧103的作用下,推动卡接筒102使其螺旋运动,并且直至凸台102c移动至长槽101g末端,此时第一挡圈101b与第二挡圈102b内外两端面均重合,第一挡圈101b、第二挡圈102b形成环形圈将圆台301固定在固定筒101内部。当需要取下连接柱300时,按下复位销106,复位销106一端推动限位销104使其收缩至凸台102c内,然后将卡接筒102向固定筒101内部按压,至卡接筒102翻转180
°
,此时卡销109与第三通孔102g同轴卡销109一端嵌入第三通孔102g内,即可取出连接柱。
36.实施例2参照图1~6,为本发明第二个实施例,该实施例基于上一个实施例,且与上一个实施例不同的是:还包括视觉处理模块、车辆控制模块、转向模块,视觉处理模块、转向模块均与车辆控制模块连接,摄像头200连接至视觉处理模块;摄像头200、视觉处理模块根据获取的图像信息得到车的运动信息,运动信息包括所述车的角度信息和速度信息;转向模块与车辆控制模块连接,转向模块根据控制模块的控制信号控制转动角度,还用于实时测量车的转向角度,并将测量结果反馈至所述车辆控制模块;车辆控制模块还连接驱动模块,驱动模块根据控制模块的控制信号控制行驶速度;视觉处理模块连接有显示模块,显示模块显示车的运动信息;还包括外部控制模块,与车辆控制模块连接,外部控制模块用于控制车辆控制模块的开启和关闭。
37.其中,图像信息为摄像头拍摄的车辆前方的实时路况照片,也就是车辆相对与两边车道线的实时图像信息。
38.视觉处理模块为opencv计算机视觉和机器学习软件,在接收到摄像头采集的图像信息后,改变图像对比度提取车道线,然后计算得到车相对车道线的位置信息,进一步计算
得到车下一时刻的运动信息。具体地,运动信息包括的角度信息和速度信息;车辆控制模块为pid控制器,显示模块为显示屏,可选地,车的运动信息可以以文字的形式进行显示,也可以以视频的形式进行显示。在本实施例中,车的运动信息,也就是视觉处理模块处理后的实时车道线信息在显示屏上以视频的形式进行显示。
39.实施例3参照图1~6,为本发明第三个实施例,该实施例基于上一个实施例,且与上一个实施例不同的是:本实施例提供一种行李牵引车,其中行李牵引车装载实施例1、2中的无人驾驶系统。
40.重要的是,应注意,在多个不同示例性实施方案中示出的本技术的构造和布置仅是例示性的。尽管在此公开内容中仅详细描述了几个实施方案,但参阅此公开内容的人员应容易理解,在实质上不偏离该申请中所描述的主题的新颖教导和优点的前提下,许多改型是可能的(例如,各种元件的尺寸、尺度、结构、形状和比例、以及参数值(例如,温度、压力等)、安装布置、材料的使用、颜色、定向的变化等)。例如,示出为整体成形的元件可以由多个部分或元件构成,元件的位置可被倒置或以其它方式改变,并且分立元件的性质或数目或位置可被更改或改变。因此,所有这样的改型旨在被包含在本发明的范围内。可以根据替代的实施方案改变或重新排序任何过程或方法步骤的次序或顺序。在权利要求中,任何“装置加功能”的条款都旨在覆盖在本文中所描述的执行所述功能的结构,且不仅是结构等同而且还是等同结构。在不背离本发明的范围的前提下,可以在示例性实施方案的设计、运行状况和布置中做出其他替换、改型、改变和省略。因此,本发明不限制于特定的实施方案,而是扩展至仍落在所附的权利要求书的范围内的多种改型。
41.此外,为了提供示例性实施方案的简练描述,可以不描述实际实施方案的所有特征(即,与当前考虑的执行本发明的最佳模式不相关的那些特征,或于实现本发明不相关的那些特征)。
42.应理解的是,在任何实际实施方式的开发过程中,如在任何工程或设计项目中,可做出大量的具体实施方式决定。这样的开发努力可能是复杂的且耗时的,但对于那些得益于此公开内容的普通技术人员来说,不需要过多实验,所述开发努力将是一个设计、制造和生产的常规工作。
43.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。