1.本发明属于电池极片加工技术领域,尤其涉及一种多工位极片刷粉除尘装置。
背景技术:
2.目前,现有的极片加工过程中,需要针对性的对极片进行刷粉过程,但是往往通过传送带模块进行对应的操作,这就导致了需要配以多个结构部件进行搭配使用,才能对电池极片刷粉的进行以及结束进行处理,以保证极片的加工质量。
技术实现要素:
3.本发明的目的在于提供一种多工位极片刷粉除尘装置,旨在解决所述背景技术中存在的问题。为实现所述目的,本发明采用的技术方案是:
4.一种多工位极片刷粉除尘装置,包括支脚以及架设在支脚上的粉刷除尘模块,所述粉刷除尘模块包括驱动模块、导向盘、横梁座、压紧凸轮板和吸尘器,所述驱动模块驱动所述吸尘器滚动,所述横梁座设有多个且架设在所述吸尘器的外边缘上,所述压紧凸轮板固定设在所述导向盘的外侧,所述横梁座的两端分别抵在所述导向座内侧的导向槽内,所述导向座固定设在支脚的上部。
5.进一步的,所述横梁座包括横梁,所述横梁的两端均设有极片夹紧机构。
6.进一步的,所述极片夹紧机构包括第二弹簧、齿轮、压刀、齿条和凸轮随动器,所述齿条和齿轮啮合,所述齿轮与压刀尾部的平行驱动轴轴向连接,所述第二弹簧套设在所述凸轮随动器的前侧,且第二弹簧的尾端与横梁的尾端抵接。
7.进一步的,所述横梁的底部设有多个真空吸附块,所述真空吸附块通过贯穿所述凸轮随动器的气管接头与气泵连接。
8.进一步的,所述导向槽沿导向盘内侧开设且为不规则封闭设计,所述凸轮随动器尾端设有凸轮支杆,所述凸轮支杆插入所述导向槽中。
9.进一步的,所述压紧凸轮板的内侧包括压紧位和松开位,所述压紧位沿松开位两端斜向下设计。
10.进一步的,所述吸尘器的两端设有多根第一弹簧,所述第一弹簧与所述横梁座连接。
11.进一步的,所述横梁座的正上方还设有超声波除尘器。
12.本发明的有益效果:
13.1、采用凸轮随动器配合导向座和压紧凸轮板,在整个装置完整绕完一周的过程中,实现对极片的上料,刷粉,除尘,随后在底部下料的全流程操作;
14.2、自动化程度高,无需另外设置辅助结构部件进行干预。
附图说明
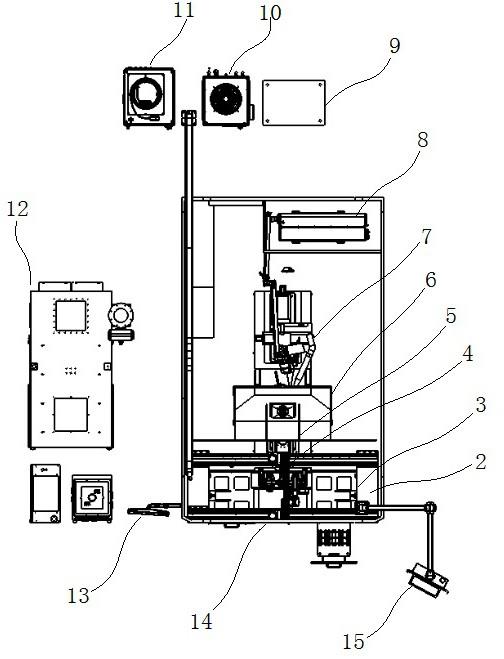
15.图1为本发明实施例提供的整体示意图;
16.图2为本发明实施例提供的a处放大结构示意图;
17.图3为本发明实施例提供的第一弹簧结构示意图;
18.图4为本发明实施例的横梁座结构示意图;
19.图5为本发明实施例提供的横梁座底部结构示意图;
20.图6为本发明实施例提供的导向盘内部结构示意图;
21.图7为本发明实施例的压紧凸轮板结构示意图。
22.其中,图中各附图标记:
23.1、导向盘;11、导向槽;2、横梁座;21、凸轮随动器;22、第二弹簧;23、齿轮;24、压刀;25、齿条;26、真空吸附块;27、气管接头;28、凸轮支杆;29、电极片;210、平行驱动轴;211、横梁;3、压紧凸轮板;31、压紧位;32、松开位;4、吸尘器;5、超声波除尘器;6、驱动模块;7、第一弹簧;8、支脚。
具体实施方式
24.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
25.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式,本文所使用的术语“上端”、“下端”、“左侧”、“右侧”、“前端”、“后端”以及类似的表达是参考附图的位置关系。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
28.如图1~7所示,本发明实施例提供了一种多工位极片刷粉除尘装置,包括支脚8以及架设在支脚8上的粉刷除尘模块,粉刷除尘模块包括驱动模块6、导向盘1、横梁座2、压紧凸轮板3和吸尘器4,驱动模块6驱动吸尘器4滚动,横梁座2设有八个且架设在吸尘器4的外边缘上,压紧凸轮板3固定设在导向盘1的外侧,横梁座2的两端分别抵在导向座内侧的导向槽11内,导向座固定设在支脚8的上部。横梁座2的正上方还设有超声波除尘器5,对应的可以根据具体需要设置多个超声波吸尘器5,从而对刷粉后的电极片29进行较为彻底的除尘处理。
29.在本具体实施例中,横梁座2包括横梁211,横梁211的两端均设有极片夹紧机构。极片夹紧机构包括第二弹簧22、齿轮23、压刀24、齿条25和凸轮随动器21,齿条25和齿轮23啮合,齿轮23与压刀24尾部的平行驱动轴210轴向连接,第二弹簧22套设在凸轮随动器21的前侧,且第二弹簧22的尾端与横梁211的尾端抵接。
30.在本具体实施例中,横梁211的底部设有多个真空吸附块26,真空吸附块26通过贯穿凸轮随动器21的气管接头27与气泵连接,从而实现当电极片29放置在其上面时对其进行紧密的吸附。
31.在本具体实施例中,导向槽11沿导向盘1内侧开设且为不规则封闭设计,凸轮随动器21尾端设有凸轮支杆28,凸轮支杆28插入导向槽11中,随着横梁座2的转动以及导向槽11的设计,横梁座2将对应进行翻转一定的角度,从而去除电极片29上的粉尘。
32.在本具体实施例中,压紧凸轮板3的内侧包括压紧位31和松开位32,压紧位31沿松开位32两端斜向下设计。每当横梁座2随着吸尘器4被驱动模块6驱动而旋转时,则横梁座2上的凸轮随动器21则周期性的与压紧位31和松开位32接触,具体的工作流程为,当位于前侧的横梁座2对应于压紧凸轮板3时,此时松开位32压迫凸轮随动器21,使得第二弹簧22受到压缩,压刀24在平行驱动轴210和齿轮23的配合下,由于和齿条25的啮合而驱动从而打开压刀24,便于上料机构将电极片29放置到横梁211上,继而被真空吸附块26吸附住。而随着横梁座2的旋转,则对应的凸轮随动器21也来到松开位32,此时上述流程相反,压刀24持续压紧电极片29,电极片29在压刀24和真空吸附块26的作用下,紧紧固定在横梁座2上。对应的,在电极片29完成刷粉加工和超声波除尘后,移动后背部,则进行电极片29的下料操作。
33.在本具体实施例中,吸尘器4的两端均设有八根第一弹簧7,每个第一弹簧7与横梁座2对应连接,在转动过程中始终保持对横梁座2的拉紧。
34.驱动模块6可选为电机驱动,在其他条件下也可以选择为凸轮驱动,马达等多个实施方式,这里不做限制。
35.以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。