1.本发明属于激光清洗技术领域,具体涉及一种锂电电芯绝缘防护膜激光清除系统及方法。
背景技术:
2.随着科技的快速发展,新技术的日趋成熟和人们对环保意识的不断增强,新能源汽车逐步量产化替代传统燃油车,作为新能源汽车动力源的主要原材料,锂离子电池具有更多的优势,产量也越来越高。在锂离子电池的制造工艺过程中,为确保电池的安全性,避免电芯与铝壳体的短路,需在铝壳体的外表面上包裹一层树脂材料作为绝缘防护膜,如图1所示,为锂电电芯的外形示意图,锂电电芯外表面包含a面、b面、c面、d面、e面、f面共6个面,其中a面为极耳所处的顶面,b面为前面,c面为右面,相对应的下面为d面,后面为e面,左面为f面。然而,锂电电芯经过贴膜机包裹后粘贴平整牢固,由于防护膜上还涂覆有一层结构胶,通过常规的人工或机械去除方式,在不损伤电芯壳体表面的情况下,存在难以清除干净、效率低下等问题。
技术实现要素:
3.本发明的目的是提供一种锂电电芯绝缘防护膜激光清除系统,至少可以解决现有技术中存在的部分缺陷。
4.为实现上述目的,本发明采用如下技术方案:一种锂电电芯绝缘防护膜激光清除系统,包括机架以及集成安装于机架上的待料单元、桁架机械手、回转清洗单元和激光复合清洗头运动单元,所述桁架机械手位于待料单元正上方,所述回转清洗单元包括中空回转台以及用于对锂电电芯进行装夹定位变向的变位机构,所述变位机构设置于中空回转台上,所述中空回转台位于待料单元与激光复合清洗头运动单元之间,实现取料工位与清洗工位来回切换,所述激光复合清洗头运动单元包括复合激光清洗机构和定位复合激光清洗机构工作位置的三维驱动机构。
5.进一步的,所述待料单元包括用于装载料盘的上下料组件,所述上下料组件包括箱体以及设置于箱体内的抽屉,所述箱体的顶盖与箱体铰接,所述箱体外设有驱动气缸,所述驱动气缸与顶盖连接,用于驱动顶盖运动而掀开顶盖,所述抽屉通过直线滑轨与箱体滑动连接,所述箱体内设有定位气缸,所述定位气缸位于抽屉运动路线端部,所述定位气缸上连接有用于固定料盘的顶杆。
6.进一步的,所述上下料组件有两组,分别布置于桁架机械手的两侧。
7.进一步的,所述桁架机械手包括桁架、双驱x轴、横梁y轴、z轴、对电芯上二维码进行扫码识别的视觉相机以及用于取料的电动夹爪,所述双驱x轴固定安装于桁架上,所述横梁y轴垂直滑动连接于双驱x轴上,所述z轴垂直滑动连接于横梁y轴上,所述视觉相机和电动夹爪连接于z轴底端。
8.进一步的,所述变位机构包括用于对锂电电芯各侧面夹紧并翻转的夹紧翻转组
件,对锂电电芯下表面托举并水平旋转锂电电芯的托举组件,以及用于压紧锂电电芯上表面的下压组件;所述夹紧翻转组件包括直线滑台、回转摆缸和平行抓手,所述回转摆缸有两个,沿直线滑台的长度方向滑动连接于直线滑台上,所述平行抓手转动连接于回转摆缸上;所述托举组件包括托板、转轴、升降驱动件和水平旋转驱动件,所述转轴由上转轴和下转轴构成,所述托板连接于上转轴顶部,所述水平旋转驱动件与上转轴连接,驱动上转轴绕其轴线转动,所述升降驱动件与下转轴下端连接,驱动下转轴带动上转轴整体升降运动;所述下压组件包括垂直位移气缸、垂直导轨、连接滑块、水平位移气缸、水平直线导轨、滑动连接板、防压偏气缸和压板,所述连接滑块滑动连接于垂直导轨上,所述垂直位移气缸与连接滑块连接,驱动连接滑块沿垂直导轨上下移动,所述水平位移气缸和水平直线导轨均安装于连接滑块上,所述滑动连接板滑动连接于水平直线导轨上,所述水平位移气缸与滑动连接板连接,驱动滑动连接板沿水平直线导轨水平移动,所述压板连接于滑动连接板一端下方,所述防压偏气缸安装于滑动连接板上,且与压板连接。
9.进一步的,所述变位机构有两套,通过回转连接架连接于中空回转台上,两套变位机构分别对应待料单元和激光复合清洗头运动单元布置。
10.进一步的,所述复合激光清洗机构包括co2激光加工头、光纤激光加工头、辅助吹气组件和随动吸尘头,所述co2激光加工头通过导光臂连接co2激光器,所述光纤激光加工头通过光纤连接光纤激光器,所述co2激光加工头和光纤激光加工头安装于三维驱动机构上,所述辅助吹气组件和随动吸尘头安装于co2激光加工头和光纤激光加工头旁边。
11.进一步的,所述三维驱动机构包括x轴滑板、x轴滑台、y轴滑台、z轴升降台和支腿,所述x轴滑板安装于x轴滑台上,所述x轴滑台垂直安装于y轴滑台上,所述y轴滑台垂直安装于z轴升降台上,所述z轴升降台通过支腿连接于机架上,所述复合激光清洗机构安装于x轴滑板上。
12.进一步的,上述锂电电芯绝缘防护膜激光清除系统还包括半包围集尘机构,所述半包围集尘机构设置于回转清洗单元和激光复合清洗头运动单元,用于收集激光复合清洗产生的烟尘。
13.另外,本发明还提供了一种利用上述锂电电芯绝缘防护膜激光清除系统的激光清除方法,具体包括如下步骤:1)将装满锂电电芯的料盘放入待料单元中;2)桁架机械手移动到待料单元上方,对待料单元中锂电电芯进行二维码识别并抓取,将锂电电芯搬运到回转清洗单元的取料工位上;3)回转清洗单元的变位机构将锂电电芯夹紧定位,通过中空回转台转动,将锂电电芯旋转到回转清洗单元的清洗工位上,对应激光复合清洗头运动单元;4)变位机构夹紧并调节锂电电芯的位置,使锂电电芯其中一侧面朝向激光复合清洗头运动单元的复合激光清洗机构,复合激光清洗机构对该侧面进行激光清洗,同时通过三维驱动机构调节复合激光清洗机构位置,以对锂电电芯整个侧面位置清洗;5)待锂电电芯的一个侧面清洗完成后,变位机构调节锂电电芯另一侧面朝向复合激光清洗机构进行清洗,依次重复;6)待锂电电芯所有侧面清洗完成后,中空回转台转动将锂电电芯从清洗工位回到取料工位,桁架机械手从取料工位上将清洗完成的锂电电芯搬运到待料单元的原位置上;
7)重复上述步骤2)~6),完成料盘中所有锂电电芯清洗。
14.与现有技术相比,本发明的有益效果:(1)本发明提供的这种锂电电芯绝缘防护膜激光清除系统除人工上下料盘外,其余所有工序均为自动化操作,对比传统的刮除方式或纯激光自动化除膜等现有的方式,降低了工人的劳动强度,节省了人力资源,极大的提高了生产效率和经营成本。
15.(2)本发明提供的这种锂电电芯绝缘防护膜激光清除系统采用co2激光器和脉冲光纤激光器两种激光复合的形式对电芯防护膜进行清除,充分利用co2激光器和脉冲光纤激光器所发出的不同波长的激光对绝缘防护膜及粘胶吸收率的不同,使绝缘防护膜能瞬间气化和分解,再在激光清洗头旁边配以辅助吹气,能快速彻底的清除绝缘防护膜,达到既没有残留物又不会损伤电芯的壳体基材的目的。
16.以下将结合附图对本发明做进一步详细说明。
附图说明
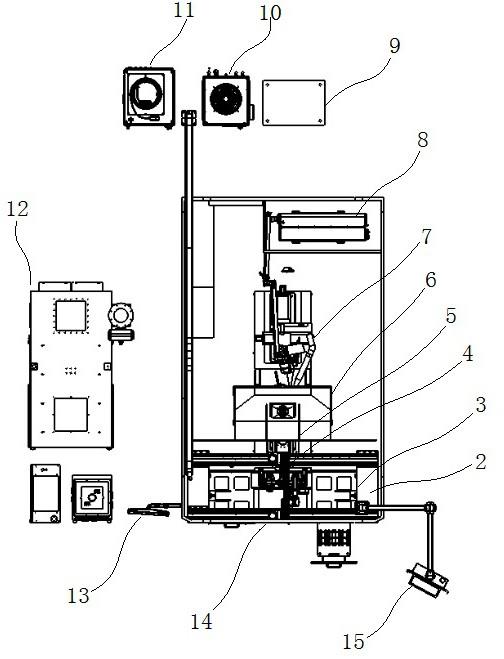
17.图1是锂电电芯结构示意图;图2是本发明锂电电芯绝缘防护膜激光清除系统的布局示意图;图3是本发明锂电电芯绝缘防护膜激光清除系统中设备防护间结构示意图;图4是本发明锂电电芯绝缘防护膜激光清除系统中机架结构示意图;图5是本发明锂电电芯绝缘防护膜激光清除系统中上下料组件结构示意图;图6是上下料组件的箱体内部结构示意图;图7是本发明锂电电芯绝缘防护膜激光清除系统中桁架机械手结构示意图;图8是本发明锂电电芯绝缘防护膜激光清除系统中回转清洗单元结构示意图;图9是本发明锂电电芯绝缘防护膜激光清除系统中夹紧翻转组件结构示意图;图10是本发明锂电电芯绝缘防护膜激光清除系统中托举组件结构示意图;图11是本发明锂电电芯绝缘防护膜激光清除系统中下压组件结构示意图;图12是本发明锂电电芯绝缘防护膜激光清除系统中半包围集尘机构示意图;图13是本发明锂电电芯绝缘防护膜激光清除系统中激光复合清洗头运动单元结构示意图。
18.附图标记说明:1、锂电电芯;2、机架;3、待料单元;4、桁架机械手;5、回转清洗单元;6、半包围集尘机构;7、激光复合清洗头运动单元;8、co2激光器;9、稳压电源;10、冷水机;11、光纤激光器;12、防爆除尘器;13、显示屏;14、设备防护间;15、悬臂控制箱;16、进出窗口;17、门板;18、进出门;9、独立间;20、密封间;21、抽屉;22、料盘;23、箱体;24、驱动气缸;25、顶盖;26、定位气缸;27、顶杆;28、桁架;29、双驱x轴;30、z轴;31、横梁y轴;32、视觉相机;33、电动夹爪;34、中空回转台;35、连接架;36、下压组件;37、夹紧翻转组件;38、托举组件;39、直线滑台;40、回转摆缸;41、平行抓手;42、升降驱动件;43、转轴;44、托板;45、水平旋转驱动件;46、垂直位移气缸;47、垂直导轨;48、连接滑块;49、水平直线导轨;50、压板;51、防压偏气缸;52、滑动连接板;53、水平位移气缸;54、下部集尘盘;55、右半包门;56、抽尘头;57、包围钣金件;58、左半包门;59、导光臂;60、co2激光加工头;61、辅助吹气组件;62、光纤激光加工头;63、随动吸尘头;64、x轴滑台;65、x轴滑板;66、y轴滑台;67、z轴升降台;68、支腿。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
20.在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,还可以是抵触连接或一体地连接;对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
22.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征;在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
23.如图1、图2、图8和图13所示,本实施例提供了一种锂电电芯绝缘防护膜激光清除系统,包括机架2以及集成安装于机架2上的待料单元3、桁架机械手4、回转清洗单元5和激光复合清洗头运动单元7,所述桁架机械手4位于待料单元3正上方,所述回转清洗单元5包括中空回转台34以及用于对锂电电芯1进行装夹定位变向的变位机构,所述变位机构连接于中空回转台34上,所述中空回转台34位于待料单元3与激光复合清洗头运动单元7之间,实现取料工位与清洗工位来回切换,所述激光复合清洗头运动单元7包括复合激光清洗机构和定位复合激光清洗机构工作位置的三维驱动机构。在使用时,先通过人工将装满锂电电芯1的料盘放入待料单元3中,桁架机械手4移动到待料单元3上方,对待料单元3中锂电电芯1进行二维码识别并抓取,将锂电电芯1搬运到回转清洗单元5的取料工位上;然后,回转清洗单元5的变位机构将锂电电芯1夹紧定位,通过中空回转台34转动,将锂电电芯1旋转到回转清洗单元5的清洗工位上,对应激光复合清洗头运动单元7,变位机构夹紧并调节锂电电芯1的位置,使锂电电芯1其中一侧面朝向激光复合清洗头运动单元7的复合激光清洗机构,复合激光清洗机构对该侧面进行激光清洗,同时通过三维驱动机构调节复合激光清洗机构位置,以对锂电电芯1整个侧面位置清洗;待锂电电芯1的一个侧面清洗完成后,变位机构再调节锂电电芯1另一侧面朝向复合激光清洗机构进行清洗,如此重复,直至待锂电电芯1所有侧面清洗完成后,中空回转台34转动将锂电电芯1从清洗工位回到取料工位,桁架机械手4从取料工位上将清洗完成的锂电电芯1搬运到待料单元3的原位置上;重复上述过程,完成料盘中所有锂电电芯1清洗。本实施例提供的这种锂电电芯绝缘防护膜激光清除系统除人工上下料盘外,其余所有工序均为自动化操作,对比传统的刮除方式或纯激光自动化除膜等现有的方式,降低了工人的劳动强度,节省了人力资源,极大的提高了生产效率和经营成本。
24.其中,如图4所示,本实施例中机架2可采用型材结构钢和碳钢板拼焊面成,易于加
工和结构稳定,该机架2通过斜垫铁支撑用螺栓固定于地面上,待料单元3、桁架机械手4、回转清洗单元5、激光复合清洗头运动单元7等集成于此机架2上。
25.可选的实施方式,如图2、图5和图6所示,所述待料单元3包括用于装载料盘22的上下料组件,所述上下料组件采用封闭箱式抽屉结构形式,包括箱体23以及设置于箱体23内的抽屉21,所述箱体23的顶盖25与箱体23铰接,所述箱体23外设有驱动气缸24,所述驱动气缸24与顶盖25连接,通过驱动气缸24驱动顶盖25运动,从而掀开顶盖25,所述抽屉21通过直线滑轨与箱体23滑动连接,直线滑轨对抽屉21的开合运动起到导向作用,所述箱体23内设有定位气缸26,所述定位气缸26位于抽屉21运动路线端部,所述定位气缸26上连接有用于固定料盘22的顶杆27。上料时,抽屉21打开,人工将装载锂电电芯1的料盘22安放于抽屉21中,抽屉21闭合,定位气缸26驱动顶杆27伸出对抽屉21中的料盘22进行定位固定,然后驱动气缸24驱动顶盖25掀开,桁架机械手4从箱体23顶部伸入对料盘22上的锂电电芯1进行二维码识别和取料;下料时,清洗完成的锂电电芯1通过桁架机械手4搬运到箱体23中料盘22的原位置上,待料盘22上所有锂电电芯清洗完成后,驱动气缸24驱动顶盖25盖上,同时定位气缸26驱动顶杆27解除对抽屉21上料盘22的固定,拉开抽屉21即可搬取料盘22。优化的,可将所述上下料组件设计为两组,分别布置于桁架机械手4的两侧,保证工序的连续性,提高生产效率。
26.可选的实施方式,如图7所示,所述桁架机械手4包括桁架28、双驱x轴29、横梁y轴31、z轴30、对锂电电芯1上二维码进行扫码识别的视觉相机32以及用于取料的电动夹爪33,所述双驱x轴29固定安装于桁架28上,所述横梁y轴31垂直滑动连接于双驱x轴29上,所述z轴30垂直滑动连接于横梁y轴31上,所述视觉相机32和电动夹爪33连接于z轴30底端。在工作过程中,通过双驱x轴29、横梁y轴31和z轴30三轴方向的移动控制锂电电芯1的自动上、下料,将锂电电芯1从料盘22或回转清洗单元5上来回取放;在此上下料过程中,视觉相机32对料盘22上的锂电电芯1进行二维码扫描读码,将产品信息传输给控制系统经计算处理后,调出与型号规格相匹配的运动控制程序和技术参数,将指令反馈给相关的执行机构,并将此信息存入mes系统(后续录入相应的生产技术工艺参数以实现产品追溯),电动夹爪33以合适的抓取力去抓取该扫描后的锂电电芯1,将锂电电芯1搬运到回转清洗单元5的取料工位上。
27.可选的实施方式,如图8所示,所述变位机构设计两套,通过回转连接架35连接于中空回转台34上,两套变位机构分别对应待料单元3和激光复合清洗头运动单元7布置,通过中空回转台34使得两套变位机构在取料工位与清洗工位来回切换,实现锂电电芯1的取料和清洗工序同步进行,提高生产效率。每套变位机构均包括用于对锂电电芯1各侧面夹紧并翻转的夹紧翻转组件37,对锂电电芯1下表面托举并水平旋转锂电电芯1的托举组件38,以及用于压紧锂电电芯1上表面的下压组件36;通过夹紧翻转组件37、托举组件38、下压组件36按设定程序与复合激光清洗机构联动配合,即可实现锂电电芯1六个面的全部清洗。
28.具体的,所述夹紧翻转组件37的一种具体实施方式如图9所示,包括直线滑台39、回转摆缸40和平行抓手41,所述回转摆缸40有两个,沿直线滑台39的长度方向滑动连接于直线滑台39上,所述平行抓手41转动连接于回转摆缸40上;桁架机械手4搬运的锂电电芯1放置于两个回转摆缸40之间的直线滑台39上,两个回转摆缸40沿直线滑台39向锂电电芯1靠近运动,抵于锂电电芯1相对的两个侧面(即锂电电芯的c面和f面)上,实现锂电电芯c面
和f面的对中同步夹持,同时回转摆缸40上的平行抓手41的两个夹爪抵于锂电电芯1另外相对的两个侧面(即锂电电芯的b面和e面)上,实现锂电电芯b面和e面的对中同步夹持。而当需要对锂电电芯1进行方向变位时,平行抓手41夹持锂电电芯1,同时回转摆缸40驱动平行抓手41带动锂电电芯1绕回转摆缸40驱动轴转动相应角度即可。其中,直线滑台39的结构包括直线导轨、正反牙丝杆和同步带驱动的伺服机构,两个回转摆缸安装于正反牙丝杆的两个螺母座上,伺服机构驱动正反牙丝杆转动,从而带动回转摆缸沿直线导轨直线移动。
29.所述托举组件38的一种具体实施方式如图10所示,包括托板44、转轴43、升降驱动件42和水平旋转驱动件45,其中,升降驱动件42位于直线滑台39下方,水平旋转驱动件45位于直线滑台39一侧,转轴43由下至上贯穿直线滑台39,所述转轴43由上转轴和下转轴同轴转动连接而成,所述托板44连接于上转轴顶部,所述水平旋转驱动件45与上转轴连接,驱动上转轴绕其轴线转动,所述升降驱动件42与下转轴下端连接,驱动下转轴带动上转轴整体升降运动。本实施例中,升降驱动件42可采用螺旋升降机,水平旋转驱动件45由驱动电机和同步带构成。在工作过程中,升降驱动件42驱动转轴43上升,使得托板44托举锂电电芯1的底面(即锂电电芯的d面),同时水平旋转驱动件45可驱动托板44带动锂电电芯水平旋转,实现锂电电芯1的四个侧面(即锂电电芯的b面、e面、c面、f面)分别与复合激光清洗机构同向,而达到对锂电电芯1的四个侧面清洗的目的;在此过程中,该托举组件38配合下压组件36使用,对锂电电芯1的上下面(即锂电电芯的a面和d面)夹持,此时可解除夹紧翻转组件37对锂电电芯1的夹持,以完成对锂电电芯1的四个侧面清洗。
30.所述下压组件36的一种具体实施方式如图11所示,包括垂直位移气缸46、垂直导轨47、连接滑块48、水平位移气缸53、水平直线导轨49、滑动连接板52、防压偏气缸51和压板50,所述连接滑块48滑动连接于垂直导轨47上,所述垂直位移气缸46与连接滑块48连接,驱动连接滑块48沿垂直导轨47上下移动,所述水平位移气缸53和水平直线导轨49均安装于连接滑块48上,所述滑动连接板52滑动连接于水平直线导轨49上,所述水平位移气缸53与滑动连接板52连接,驱动滑动连接板52沿水平直线导轨49水平移动,所述压板50连接于滑动连接板52一端下方,所述防压偏气缸51安装于滑动连接板52上,且与压板50连接。在工作过程中,通过水平位移气缸53和垂直位移气缸46的驱动作用调节压板50的位置,实现对锂电电芯1上面(即a面)的压紧。
31.采用上述变位机构实现锂电电芯1的工位转移、方向变位、装夹定位,并配合复合激光清洗机构进行激光清洗的具体过程如下:首先,桁架机械手4将锂电电芯1上料到夹紧翻转组件37的直线滑台39处的托板44上后,两个回转摆缸40移动先对锂电电芯1的c面和f面进行对中定位夹紧,随后平行抓手41张开同时对锂电电芯1的b面和e面同步夹紧,桁架机械手4移开,中空回转台34动作进行工位切换,将锂电电芯1送到清洗工位。然后,锂电电芯1到清洗工位后,托举组件38的升降驱动件动作,使托板44从锂电电芯1的d面移开,回转摆缸40驱动锂电电芯1垂直翻转90
°
,将锂电电芯1的a面翻至垂直并面向复合激光清洗机构,接着复合激光清洗机构移动到锂电电芯清洗工位,先对锂电电芯a面进行激光清洗;a面清洗完成后,回转摆缸40逆向垂直翻转180
°
,将锂电电芯d面翻至面向复合激光清洗机构,再对锂电电芯d面进行激光清洗;d面清洗完后,回转摆缸40将锂电电芯再垂直翻转90
°
,回到b面面向复合激光清洗机构,锂电电芯1下面的托举组件38动作,托板44升起托住锂电电芯d面,同时锂电电芯1上面的下压组件36动作,压板50下移压住锂电电芯a面,接着夹紧翻转组件
37上对应锂电电芯的b面、e面、c面、f面夹持松开,复合激光清洗机构移动到相应位置对锂电电芯b面开始清洗;b面清洗完后,托举组件38的水平旋转驱动件45动作,带动锂电电芯1做水平旋转90
°
,使锂电电芯c面面向复合激光清洗机构,复合激光清洗机构调整位置,开始对锂电电芯c面清洗;c面清洗完后,锂电电芯1继续做同向水平旋转90
°
,使锂电电芯e面面向复合激光清洗机构,复合激光清洗机构再次调整位置,对锂电电芯e面清洗;e面清洗完后,锂电电芯1继续做同向水平旋转90
°
,使锂电电芯f面面向复合激光清洗机构,完成对锂电电芯f面的清洗,锂电电芯1最后一次水平旋转90
°
,再次使锂电电芯b面面向复合激光清洗机构。最后,夹紧翻转组件37再次对锂电电芯的b面、e面、c面、f面夹紧,下压组件36的压板50松开归位,中空旋转台34反向动作进行工位切换,将锂电电芯1由清洗工位送到取料工位。
32.对于激光复合清洗头运动单元7的一种具体实施方式,如图2和图13所示,所述复合激光清洗机构包括co2激光加工头60、光纤激光加工头62、辅助吹气组件61和随动吸尘头63,所述co2激光加工头60通过导光臂59连接co2激光器8,所述光纤激光加工头62通过光纤连接光纤激光器11,所述co2激光加工头60和光纤激光加工头62安装于三维驱动机构上,所述辅助吹气组件61和随动吸尘头63安装于co2激光加工头60和光纤激光加工头62旁边。所述三维驱动机构包括x轴滑板65、x轴滑台64、y轴滑台66、z轴升降台67和支腿68,所述x轴滑板65安装于x轴滑台64上,所述x轴滑台64垂直安装于y轴滑台66上,所述y轴滑台66垂直安装于z轴升降台67上,所述z轴升降台67采用电动缸驱动,以四根圆导轨作垂直导向用,所述z轴升降台67通过支腿68连接于机架2上,所述复合激光清洗机构安装于x轴滑板65上,通过三维驱动机构驱动复合激光清洗机构在x/y/z三轴向上的移动,实现复合激光清洗机构位置的调整。本实施例中采用co2激光器8和脉冲光纤激光器11两种激光复合的形式对电芯防护膜进行清除,充分利用co2激光器8和脉冲光纤激光器11所发出的不同波长的激光对绝缘防护膜及粘胶吸收率的不同,使绝缘防护膜能瞬间气化和分解,再在激光清洗头旁边配以辅助吹气,能快速彻底的清除绝缘防护膜,达到既没有残留物又不会损伤电芯的壳体基材的目的。
33.优化上述技术方案,如图2所示,本实施例的锂电电芯绝缘防护膜激光清除系统还包括半包围集尘机构6,所述半包围集尘机构6设置于回转清洗单元5和激光复合清洗头运动单元7,用于收集激光复合清洗产生的烟尘。具体的,如图12所示,该半包围集尘机构6包括包围钣金件57、抽尘头56、左半包门58、右半包门55及下部集尘盘54,抽尘头56用于抽吸走被吹散弥满在半包围内的烟尘并形成空间内的负压,不让烟尘外逸出来,下部集尘盘54为抽屉式结构,用于收集未被抽走的落尘。
34.另外,本实施例的锂电电芯绝缘防护膜激光清除系统还包括设备防护间14,如图2所示,上述的机架2、待料单元3、桁架机械手4、回转清洗单元5、半包围集尘机构6、激光复合清洗头运动单元7等均设置于设备防护间内;该设备防护间整体结构布置如图3所示,采用全包围的钣金房结构,中间用门板17隔断为两个区域,前面区域为上下料区域,后面区域为清洗工作区域,设备防护间14正前面留有用于人工上下料的左右两个进出窗口16,对应待料单元3的两个上下料组件,设备防护间1前面区域左上方装有显示屏13,用于监控复合激光头的清洗加工情况,右上方装有悬臂控制箱15,用于操控设备工作运行,设备防护间14正后面留有co2激光器8放置的独立间19,左后面留有安装电气控制单元的密封间20,清洗工
作区域右侧留有人员进出门18。
35.当然,如图2所示,该锂电电芯绝缘防护膜激光清除系统还包括其它配置单元,如稳压电源9、冷水机10及防爆除尘器12为清洗设备必不可少的常规配套设备,其型规与设备的整体性能、工艺及技术参数相匹配。
36.以上例举仅仅是对本发明的举例说明,并不构成对本发明的保护范围的限制,凡是与本发明相同或相似的设计均属于本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
