技术特征:
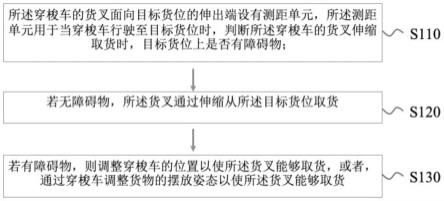
1.一种取货方法,其特征在于:所述取货方法包括通过穿梭车向货物两侧同时伸出货叉拨取货物,所述穿梭车的货叉面向目标货位的伸出端设有测距单元,所述测距单元用于当穿梭车行驶至目标货位时,判断所述穿梭车的货叉伸缩取货时,目标货位上是否有障碍物;若无障碍物,所述货叉通过伸缩从所述目标货位取货;若有障碍物,则调整穿梭车的位置以使所述货叉能够取货,或者,通过穿梭车调整货物的摆放姿态以使所述货叉能够取货。2.根据权利要求1所述的一种取货方法,其特征在于,所述若有障碍物,则调整穿梭车的位置,包括,若一侧货叉的测距单元检测到所述目标货位上有障碍物,则控制穿梭车向有障碍物的货叉一侧移动,在移动的第一预设距离内,若出现两侧货叉的测距单元检测到所述目标货位上无障碍物,则控制所述货叉通过伸缩从所述目标货位取货。3.根据权利要求1所述的一种取货方法,其特征在于,所述通过穿梭车调整货物的摆放姿态以使所述货叉能够取货,包括,若一侧货叉的测距单元检测到所述目标货位上有障碍物,则判断货叉伸出端到障碍物的距离是否大于第一阈值,若大于,则将货叉伸出至接近障碍物,控制所述穿梭车本体朝向另一侧货叉方向移动,直至两侧货叉的测距单元均检测不到障碍物,则控制所述货叉通过伸缩从所述目标货位取货。4.根据权利要求3所述的一种取货方法,其特征在于,所述判断货叉伸出端到障碍物的距离是否大于第一阈值,若货叉伸出端到障碍物的距离不大于第一阈值,则控制穿梭车向有障碍物的货叉一侧移动,在移动的第一预设距离内,若出现两侧货叉的测距单元均检测不到障碍物,则控制所述货叉通过伸缩从所述目标货位取货;若未出现两侧货叉的测距单元均检测不到障碍物,且出现有障碍物一侧的货叉伸出端到障碍物的距离大于第一阈值,则将货叉伸出至接近障碍物,控制所述穿梭车朝向另一侧货叉方向移动,直至两侧货叉的测距单元均检测不到障碍物,则控制所述货叉通过伸缩从所述目标货位取货。5.根据权利要求4所述的一种取货方法,其特征在于,所述若货叉伸出端到障碍物的距离不大于第一阈值,则控制穿梭车向有障碍物的货叉一侧移动,在移动的第一预设距离内,若未出现两侧货叉的测距单元均检测不到障碍物,且未出现有障碍物一侧的货叉伸出端到障碍物的距离大于第一阈值,则控制穿梭车向有障碍物的一侧移动,直至有障碍物的一侧货叉在所述目标货位上检测不到障碍物,则控制货叉伸出至两侧货叉均不碰触障碍物,控制穿梭车向另一侧货叉方向移动,直至两侧货叉的测距单元均检测不到障碍物,控制所述货叉通过伸缩从所述目标货位取货。6.根据权利要求1所述的一种取货方法,其特征在于,所述通过穿梭车调整货物的摆放姿态以使所述货叉能够取货,包括,控制所述穿梭车本体先向一侧货叉方向移动,再向另一侧货叉方向移动,直至测距单
元检测不到障碍物,比较目标货位上两侧的障碍物消失前,两侧货叉的伸出端与障碍物之间的距离,控制穿梭车向距离小的一侧货叉移动,在移动的第一预设距离内,若出现该侧货叉的测距单元检测不到障碍物,则控制货叉伸出至两侧货叉均不碰触障碍物,控制穿梭车向另一侧货叉方向移动,直至两侧货叉的测距单元均检测不到障碍物,则控制所述货叉通过伸缩从所述目标货位取货。7.根据权利要求1-6任一所述的一种取货方法,其特征在于,所述取货方法还包括至少两个测距传感器,所述至少两个测距传感器安装在所述穿梭车本体上,分布在两侧货叉的外侧,所述测距传感器面向目标货位,所述货叉通过伸缩从所述目标货位取货配置为,当穿梭车本体上测距传感器以及货叉上的测距单元在所述目标货位上都检测不到障碍物,再控制货叉通过伸缩从所述目标货位取货。8.根据权利要求3-6任一所述的一种取货方法,其特征在于,所述直至两侧货叉的测距单元均检测不到障碍物,则控制所述货叉通过伸缩从所述目标货位取货,包括,当移动至两侧货叉的测距单元均检测不到障碍物,控制穿梭车向相反方向移动第二预设距离,再控制所述货叉通过伸缩从所述目标货位取货。9.根据权利要求2或4或5或6的任一所述的一种取货方法,其特征在于,所述取货方法还包括至少两个测距传感器,所述至少两个测距传感器安装在所述穿梭车本体上,分布在两侧货叉的外侧,所述测距传感器面向目标货位,所述穿梭车移动的第一预设距离满足如下条件:所述穿梭车在向某一侧货叉移动第一预设距离的过程中,设置在穿梭车车体上靠近该侧货叉的测距传感器检测不到障碍物。10.一种取货装置,其特征在于,所述取货装置用于控制穿梭车从目标货位取出货物;所述穿梭车包括穿梭车本体及设置于所述穿梭车本体上的货叉,所述货叉被配置为通过从所述穿梭车本体中伸出或缩回以完成取货;所述取货装置包括:检测模块,用于在穿梭车到达目标货位时,检测通过所述穿梭车的货叉对所述目标货位的货物进行取货时是否有障碍物;调整模块,用于在所述检测模块检测到障碍物时,调整穿梭车的位置和/或通过穿梭车的货叉对所述目标货位的货物摆放姿态进行调整,以使所述货叉能够伸缩取货。
技术总结
本申请涉及仓储物流设备技术领域,本申请实施例提供了一种取货方法及装置。根据本申请所述取货方法,通过在穿梭车的货叉面向目标货位的伸出端上设置测距单元,当所述穿梭车行驶至目标货位时,判断所述穿梭车的货叉伸缩取货时,目标货位上是否有障碍物;若无障碍物,所述货叉通过伸缩从所述目标货位取货;若有障碍物,则调整穿梭车的位置以使所述货叉能够取货,或者,通过穿梭车调整货物的摆放姿态以使所述货叉能够取货;从而通过调整穿梭车和/或对目标货位上摆放姿态不正确的货物进行调整,使穿梭车从目标货位上完成取货,提高取货效率和准确率。和准确率。和准确率。
技术研发人员:张延武 乔庆波 宓波 包立新 沈鹭
受保护的技术使用者:浙江凯乐士科技集团股份有限公司
技术研发日:2022.08.31
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。