1.本发明涉及机器人技术领域,具体涉及一种用于轨道交通车辆巡检的机器人及巡检方法。
背景技术:
2.随着交通运输行业的发展,轨道交通车辆的数量越来越大,轨道交通车辆底部的巡检工作也越来越多。目前轨道交通车辆底部的巡检多是人工作业,存在检修范围广、作业难度大、作业过程繁琐、检修效率低下、遗留作业盲区等问题,因此利用器人代替人工巡检的产品也相继出现。但目前仍存在因轨道交通车辆底部的被检测部位被灰尘覆盖,视觉难以对零部件异常进行判断,无法检测或漏检的问题,进而导致机器人巡检准确率降低等问题。
技术实现要素:
3.本技术主要解决的技术问题提供一种用于轨道交通车辆底部巡检的机器人及巡检方法,以在巡检中对被检测部位进行清理和检测,解决被检测部位被灰尘覆盖导致无法检测或漏检的问题,提高机器人巡检准确率。
4.为解决上述技术问题,本技术采用的一个技术方案是:提供一种用于轨道交通车辆底部巡检的机器人,所述机器人包括第一移动组件、控制柜、第二移动组件、第一机械臂和第二机械臂,所述第一移动组件、所述控制柜和所述第二移动组件依次堆叠设置,所述第一机械臂和所述第二机械臂分别设置于所述第二移动组件上;所述第二移动组件可驱动所述第一机械臂和所述第二机械臂在所述第二移动组件所在平面上移动;所述第一机械臂上设置有清洁组件、所述第二机械臂上设置有探测组件;所述第一移动组件上设置有激光线阵相机。
5.其中,所述第二移动组件包括第一移动单元和第二移动单元,所述第一机械臂与所述第一移动单元固定连接,所述第二机械臂与所述第二移动单元固定连接。
6.其中,所述第一移动单元包括第一电缸和第一直线导轨,所述第二移动单元包括第二电缸和第二直线导轨。
7.其中,所述清洁组件包括电动刷和力觉传感器,所述力觉传感器与所述第一机械臂固定连接,所述电动刷与所述力觉传感器可拆卸连接。
8.其中,所述探测组件包括深度相机,所述深度相机与所述第二机械臂可拆卸连接。
9.其中,所述控制柜包括第一壳体以及嵌设在所述壳体内的电源管理组件和数据处理组件。
10.其中,所述第一移动组件还包括第二壳体、防撞条、驱动器、若干滚轮以及环境感知组件,所述防撞条设置于所述第二壳体上,所述滚轮和所述环境个感知组件嵌设在所述第二壳体上,所述驱动器嵌设于所述第二壳体内;所述驱动器可以驱动若干所述滚轮差速转动。
11.其中,所述环境感知组件包括二维激光雷达传感器、激光雷达以及深度相机,所述二维激光雷达传感器、所述激光雷达和所述深度相机嵌设在所述第二壳体表面。
12.本技术采用的另一技术方案是:提供一种轨道交通车辆底部方法,使用上述机器人对轨道交通车辆底部进行巡检,包括以下步骤:
13.s1、所述机器人移动至轨道交通车辆底部进行初步扫描,确认轨道交通车辆的信息并调用对应的作业方案;
14.s2、所述机器人按照所述作业方案中规划好的巡检路线在轨道交通车辆底部行进,所述第二机械臂伸展至所述作业方案中预设的被检测部位采集第一图像数据;
15.s3、所述机器人对所述第一图像数据进行处理识别,当所述被检测部位存在灰尘导致无法识别所述被检测部位是否存在异常时,所述第一机械臂伸展至所述被检测部位进行灰尘清理,清理完成后所述第二机械臂伸展至所述被检测部位采集第二图像数据,所述机器人对所述第二图像数据进行处理识别;
16.当所述被检测部位可以被识别但处于异常状态时,所述机器人反馈异常信息;
17.当所述被检测部位可以被识别且无异常时,所述机器人不进行操作;
18.s4、所述机器人按照所述巡检路线继续巡检直至所述机器人行进至所述巡检路线的终点。
19.其中,所述作业方案包括所述机器人建立的检测环境的二维地图、轨道交通车辆底部结构的空间地图以及巡检路线;所述检测环境的二维地图和所述轨道交通车辆底部结构的空间地图通过所述激光线阵相机构建。
20.本技术的有益效果是:本技术提供的用于轨道交通车辆底部巡检的机器人设置有清洁组件和探测组件,通过清洁组件和探测组件配合解决了被检测部位因积灰严重而无法检测或漏检的问题;同时将第一机械臂和第二机械臂设置在第二移动组件上,在保证了结构紧凑的同时增大机器人的横向检测范围,且便于机器人在轨道交通车辆底部转动与行进。
附图说明
21.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
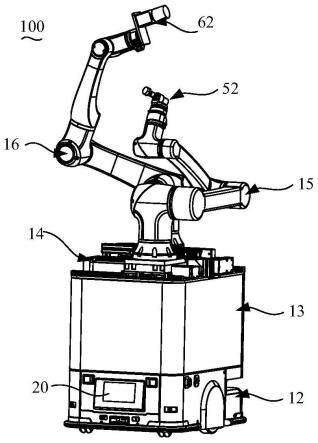
22.图1是本技术一实施例中用于轨道交通车辆底部巡检的机器人的结构示意图;
23.图2是图1实施例中用于轨道交通车辆底部巡检的机器人的结构拆分示意图;
24.图3是图1实施例中第二移动组件的结构示意图;
25.图4是图1实施例中第一机械臂的结构示意图;
26.图5是图1实施例中第二机械臂的结构示意图;
27.图6是图1实施例中控制柜的结构示意图;
28.图7是图1实施例中第一移动组件第一角度的结构示意图;
29.图8是图1实施例中第一移动组件第二角度的结构示意图;
30.图9是图1实施例中第一移动组件第三角度的结构示意图;
31.图10是本技术一实施例中轨道交通车辆底部巡检方法的流程示意图。
具体实施方式
32.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术附图和实施例,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全的实施例。基于本技术的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护范围。在不冲突的情况下,下述实施例及实施例中的特征可以相互组合。
33.需要说明,若本技术实施中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等描述仅用于描述目的,而不能理解为指示或暗示其对相对重要性和隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互组合,但是必须使本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
34.请参阅图1和图2,图1是本技术一实施例中用于轨道交通车辆底部巡检的机器人100的结构示意图,图2是图1实施例中用于轨道交通车辆底部巡检的机器人100的结构拆分示意图。机器人100大致包括第一移动组件12、控制柜13、第二移动组件14、第一机械臂15以及第二机械臂16。第一移动组件12、控制柜13和第二移动组件14依次堆叠设置,第一机械臂15和第二机械臂16设置在第二移动组件上。其中,第一机械臂15上设置有清洁组件52,第二机械臂16上设置有探测组件62,第一移动组件12上设置有激光线阵相机20。
35.第一移动组件12可以使机器人100移动,第二移动组件14可以使第一机械臂15和第二机械臂16在第二移动组件14所在的平面上移动。当机器人100在轨道交通车辆底部进行巡检时,第一机械臂15和第二机械臂16除自身伸展所能触及的检测范围外,借助第二移动组件14可以获得额外的检测范围,即机器人100结构紧凑,便于在轨道交通车辆底部转动与行进,同时增大了机器人100的检测范围。
36.进一步地,第一机械臂15上设置有清洁组件52,第二机械臂16上设置有探测组件62,当机器人100在轨道交通车辆底部进行巡检时,若被检测部位累积了大量灰尘,清洁组件52可以清洁被检测部位累积的灰尘,随后探测组件62再对被检测部位进行检测,通过清洁组件52和探测组件62配合解决了被检测部位因积灰严重而无法检测或漏检的问题。此外,激光线阵相机20可以配合探测组件62对被检测部位进行联合检测,提高了巡检的效率和准确率。
37.请参阅图3,图3是图1实施例中第二移动组件14的结构示意图。第二移动组件14大致包括承载板40、轨道41、第一移动单元42和第二移动单元43。轨道41、第一移动单元42和第二移动单元43与承载板40固定连接。第一机械臂15与第一移动单元42固定连接,第二机械臂16与第二移动单元43固定连接,进而第一机械臂15和第二机械臂16可以相对于第二移动组件14所在平面移动。第二移动组件14增大了机器人100固定位置下的检测范围,减小漏检的概率,也解决了频繁调整机器人100位置的问题。
38.在一实施方式中,第一移动单元42可以驱动第一机械臂15沿垂直于机器人100行进的方向移动,第二移动单元43可以驱动第二机械臂16沿垂直于机器人100行进的方向移
动。通过第一移动单元42和第二移动单元43的设置可以扩大第一机械臂15和第二机械臂16在垂直于机器人100行进的方向的伸展范围,增大机器人100的巡检范围。当然根据机器人100的巡检范围的需要,第一移动单元42可以驱动第一机械臂15沿其他方向移动,第二移动单元43可以驱动第二机械臂16沿其他方向移动。
39.具体而言,第一移动单元42可以包括第一电缸421、第一直线导轨422、第一支撑板423以及第一铰链424。第一电缸421与第一直线导轨422平行设置,并且第一电缸421和第一直线导轨422垂直于机器人100前进的方向设置。第一支撑板423背离第一机械臂15的所在平面的一端与第一电缸421固定连接,另一端与第一直线导轨422固定连接,第一电缸421可以驱动第一支撑板423沿第一直线导轨422平行的方向移动。第一铰链424的一端与轨道41固定连接,另一端与第一支撑板423固定连接,第一铰链424可以限定第一支撑板423的移动范围。
40.第二移动单元43可以包括第二电缸431、第二直线导轨432、第二支撑板433以及第二铰链434。第二电缸431与第二直线导轨432平行设置,并且第二电缸431和第二直线导轨432垂直于机器人100前进的方向设置。第二支撑板433背离第二机械臂16的所在平面的一端与第二电缸431固定连接,另一端与第二直线导轨432固定连接,第二电缸431可以驱动第二支撑板433沿第二直线导轨432平行的方向移动。第二铰链434的一端与轨道41背离第一铰链424的一面固定连接,另一端与第二支撑板433固定连接,第二铰链434可以限定第二支撑板433的移动范围。
41.请参阅图4,图4是图1实施例中第一机械臂15的结构示意图。第一机械臂15大致包括第一机械臂主体51和清洁组件52。清洁组件52可以包括电动刷521和力觉传感器522。第一机械臂主体51的一端与第一支撑板423固定连接,另一端与力觉传感器522固定连接,电动刷521与力觉传感器522与远离第一机械臂主体51的一端可拆卸连接。
42.在一实施方式中,第一机械臂主体51可以为六自由度机械臂。第一机械臂15可以伸展至被检测部位清理灰尘。其中,电动刷521通过旋转对被检测部位进行清洁,力觉传感器522可以识别电动刷521与被检测部位接触时的压力,当识别到压力过大或过小时,可以将信息反馈给机器人100,机器人100接收到信号后可适当调节第一机械臂15,以使电动刷521与被检测部位保持合适的距离,进而保证被检测部位沉积的灰尘被清除。
43.需要说明的是,在一实施方式中,电动刷521也可以替换为电动螺丝刀等其他的组件,进而可以执行拧紧螺栓等其他作业。
44.请参阅图5,图5是图1实施例中第二机械臂16的结构示意图。第二机械臂16大致包括第二机械臂主体61和探测组件62。探测组件62与第二机械臂主体61远离第二支撑板433的一端可拆卸连接。
45.在一实施方式中,第二机械臂主体61可以为六自由度机械臂,探测组件62可以为深度相机。其中第二机械臂主体61可以伸展以使探测组件62移动至被检测部位附近,已使探测组件62对被检测部位进行图像采集。探测组件62可以为结构光深度相机、双目视觉深度相机或tof深度相机等。
46.在一实施方式中,探测组件62还可以为紫外传感器,通过紫外传感器可以对被检测部位进行探伤检测。
47.请参阅图6,图6是图1实施例中控制柜13的结构示意图。控制柜13大致包括第一壳
体30、电源管理组件31和数据处理组件32。第一壳体30围设形成容置空间,电源管理组件31和数据处理组件32设置于第一壳体30围设形成的容置空间中。第一壳体30的长度与宽度与第一移动组件12基本相同,第一壳体30的高度可以根据需要进行设置,除容纳电源管理组件31和数据处理组件32外,第一壳体30可适当提高第二移动组件14的高度,即提高了第一机械臂15和第二机械臂16的高度,以便第一机械臂15和第二机械臂16在保证结构紧凑的同时可以伸展至被检测部位附近。
48.电源管理组件31可以与数据处理组件32、第一移动组件12、第二移动组件14、第一机械臂15以及第二机械臂16建立电性连接并提供能源供应。数据处理组件32可以与第一移动组件12、第二移动组件14、第一机械臂15以及第二机械臂16建立电性连接,以控制第一移动组件12、第二移动组件14、第一机械臂15以及第二机械臂16运动,并可接收各组件采集的各类型数据进行处理识别。
49.请参阅图7-图9,图7是图1实施例中第一移动组件12的第一角度的结构示意图,图8是图1实施例中第一移动组件12的第二角度的结构示意图,图9是图1实施例中第一移动组件12的第三角度的结构示意图。第一移动组件12大致包括激光线阵相机20、第二壳体21、防撞条22、驱动器23、若干滚轮24、环境感知组件25以及急停开关26。第二壳体21可以包括盖体211和沿盖体211四周垂直向下延伸的侧壁212。
50.激光线阵相机20、防撞条22、环境感知组件25和急停开关26嵌设在侧壁212上,驱动器23和若干滚轮24嵌设在侧壁212背离急停开关26的一侧。激光线阵相机20和环境感知组件25可以对周围环境进行探测以协助机器人100进行巡检,驱动器23驱动滚轮24转动以使机器人100移动,急停开关26可以控制机器人100在紧急情况下停止,防撞条22设置在侧壁212靠近地面的一端,防撞条22凸出于侧壁212的边缘设置,可以为机器人100因意外与外界环境产生碰撞提供缓冲,起到保护作用。
51.具体而言,侧壁212可以包括第一侧壁2121、第二侧壁2122、第三侧壁2123以及第四侧壁2124。第一侧壁2121面向机器人100前进的方向,第二侧壁2122背离机器人100前进的方向设置,第三侧壁2123与第一侧壁2121和第二侧壁2122连接,第四侧壁2124与第一侧壁2121和第二侧壁2122连接,第一侧壁2121、第二侧壁2122、第三侧壁2123以及第四侧壁2124围设形成一个环形结构。
52.在一实施方式中,激光线阵相机20嵌设在第一侧壁2121上,激光线阵相机20可以构建地铁底部的全局三维地图,并粗略地对被检测项目进行检测,激光线阵相机20配合探测组件62可以提高机器人100的巡检效率并极大减少了漏检的情况发生。
53.在一实施方式中,环境感知组件25大致包括两个二维激光雷达传感器251、四个激光雷达252以及深度相机253。两个二维激光雷达传感器251嵌设在第一侧壁2121上以实现机器人100全方位的避障和定位导航;四个激光雷达252嵌设在第二侧壁2122的凹陷部上,激光雷达252可以覆盖二维激光雷达传感器251的盲区,用于机器人100后退时的安全防护;深度相机253嵌设在第一侧壁2121上,用于识别机器人100行进过程中前方的低矮障碍物。通过二维激光雷达传感器251、激光雷达252、深度相机253以及防撞条22的设置实现了机器人100全方位和全方面的安全防范。
54.在一实施方式中,滚轮24可以包括第一滚轮241、第二滚轮242以及四个第三滚轮243。第一滚轮241设置在第三侧壁2123上,第二滚轮242设置在第四侧壁2124上,四个第三
滚轮243分别设置在盖体211背离第二移动组件14的一面的四个角落。
55.其中,驱动器23可以驱动第一滚轮241和第二滚轮242差速转动。第一滚轮241和第二滚轮242差速布局可以使机器人100无转弯半径地转向,便于机器人100在轨道交通车辆底部相对较狭窄的空间内移动以及调整身位,以使机器人100的巡检范围扩大,提高机器人100的巡检效率。
56.第三滚轮243可以使机器人100具有更好的稳定性,同时辅助第一滚轮241和第二滚轮242移动。此外,第三滚轮243具有一定的高度,可以使机器人100与地面保持一定的高度,进而使机器人100具有3度-7度的爬坡能力,例如,机器人100的爬坡能力为3度、3.5度、4度、5度、6度或7度等。
57.请参阅图10,图10是本技术一实施例中轨道交通车辆底部巡检方法的流程示意图。使用上述机器人100对轨道交通车辆底部进行巡检的方法,大致包括以下步骤:
58.s1001:机器人100移动至轨道交通车辆底部进行初步扫描,确认轨道交通车辆的信息并调用对应的作业方案。
59.其中,作业方案包括检测环境的二维地图,轨道交通车辆底部结构的空间地图以及巡检路线。在巡检前,通过人工控制机器人100对检测环境以及车辆进行扫描并建立检测环境的二维地图,轨道交通车辆底部结构的空间地图以及规划好的巡检路线。巡检路线进一步可以包括机器人100的行进路线和轨道交通车辆底部的被检测部位,被检测部位可以包括螺栓的位置、容易漏油的部位或转向架等。
60.s1002:机器人100按照作业方案中规划好的巡检路线在轨道交通车辆底部行进,第二机械臂16伸展至作业方案中预设的被检测部位采集第一图像数据。
61.其中,第一图像数据由第二机械臂16上的探测组件62采集,探测组件62可以为结构光深度相机、双目视觉深度相机或tof深度相机等。深度相机可以通过三维坐标还原真实场景,以实现对被检测部位的精准判断。
62.s1003:机器人100对第一图像数据进行处理识别,当被检测部位存在灰尘导致无法清楚识别被检测部位时,第一机械臂伸展至被检测部位进行灰尘清理,清理完成后第二机械臂16伸展至被检测部位采集第二图像数据,机器人100对第二图像数据进行处理识别;
63.当被检测部位可以被清楚识别但出于异常状态时,机器人100反馈异常信息;
64.当被检测部位可以被清楚识别且处于正常状态时,机器人100不进行操作。
65.在一实施方式中,机器人100在巡检过程中采用基于深度学习的深度相机和激光线阵相机联合的方式进行巡检,激光线阵相机对轨道车辆底部进行初步检测,深度相机对巡检路线中预设好的被检测部位进行精准检测,两者联合的方式在保证巡检准确度的同时也提高了巡检效率。
66.s1004:机器人100按照巡检路线继续巡检直至行进到巡检路线的终点。
67.其中,继续巡检的步骤包括重复步骤s1002和步骤s1003,已完成对巡检路线中预设的所以被监测点的巡检作业。机器人100在巡检的过程中,通过环境感知组件25采用激光slam定位导航,无需对现场环境进行改造,提高了机器人100的自主性。
68.在一实施方式中,机器人100对当前的轨道交通车辆底部巡检完成后,可以移动至另一个轨道交通车辆底部进行巡检,并重复步骤s1001-s1004。
69.综上所述,本技术提供的用于轨道交通车辆底部巡检的机器人设置有清洁组件和
探测组件,通过清洁组件和探测组件配合解决了被检测部位因积灰严重而无法检测或漏检的问题;同时将第一机械臂和第二机械臂设置在第二移动组件上,在保证了结构紧凑的同时增大机器人的横向检测范围,且便于机器人在轨道交通车辆底部转动与行进;在巡检过程中,采用基于深度学习的深度相机和激光线阵相机联合的方式进行巡检,在保证巡检准确度的同时也提高了巡检效率。此外,通过环境感知组件和防撞条的设置实现了机器人全方位和全方面的安全防范。
70.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
