1.本发明属于诊疗器械技术领域,尤其涉及一种用于诊疗和心肺复苏的多功能机器人。
背景技术:
2.心肺复苏是针对心脏和呼吸骤停患者,为了恢复自主呼吸和自主循环所采用的急救技术,其诊断和救治是医生进行急救治疗的重要内容。在心肺复苏的实施过程中,借助机械设备对人体进行有效地胸外按压,可以减轻急救医生的负担,提高患者救助的效率。
3.现在市场上各种诊疗设备层出不穷,但是功能单一,诊疗效果受限,无法满足急诊室和病房的特定需求。而现有的心肺复苏机器人的功能单一,心肺复苏效果不佳,无法满足医疗急救多方面的救治需求。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的是提供一种用于诊疗和心肺复苏的多功能机器人,该机器人集成诊疗及心肺复苏等多种功能于一体,可协助医生对患者进行针对性的治疗,提高急诊科室的救治效率。
5.为实现上述目的,本发明采用如下技术方案:一种用于诊疗和心肺复苏的多功能机器人,包括机体、探头支架、遥操作手柄和机械臂,所述探头支架设置在机体侧面,用于放置多种可更换探头,机体上与探头支架相对的一侧设置有遥操作手柄,遥操作手柄通过手柄支架固定在机体上。
6.所述机械臂设置在机体前端,机械臂的末端设置有探头更换装置,所述探头更换装置与多种可更换探头相适配,从而实现多种可更换探头的快速更换。
7.进一步地,所述机体的顶部设置有交互显示器,所述交互显示器通过旋转底座固定在机体上。
8.所述旋转底座包括支撑杆和安装杆,所述安装杆的一端与所述支撑杆相连,另一端与所述交互显示器相连。
9.进一步地,所述机体顶部还设置有手动更换装置,所述手动更换装置通过伸缩软管与机体连接。
10.进一步地,所述机械臂的末端内置有六维力传感器。
11.进一步地,所述机体上设置有多个激光雷达和多个超声波雷达,所述激光雷达设有3个,分别位于机体顶部与机体前端,位于机体顶部的激光雷达通过伸缩支架固定在机体上,所述超声波雷达设有4个,分别位于机体两侧与机体前端。
12.还设置有多个摄像头,所述摄像头设有2个,在机体前端呈上下排布。
13.进一步地,所述多种可更换探头分别为仿手掌按压触头、红外热成像仪、人体三维扫描仪和超声波探头。
14.进一步地,所述机体底部设置有底盘,所述底盘上对称设有四个万向轮,所述万向
轮通过万向轮连接架与机体相连,位于机体前端的两个万向轮大于位于机体后端的两个万向轮,位于机体前端的两个万向轮与轮毂电机相连。
15.所述底盘上还对称设置有多个t型固定脚架,所述t型固定脚架为可伸缩设置。
16.进一步地,所述机器人能在超声诊疗模式与心肺复苏模式之间切换。
17.进一步地,当机器人切换为超声诊疗模式时,工作方法为:将机器人置于病床侧,将病人置于平卧位,将机械臂末端更换为超声波探头,通过机械臂末端内置的六维力传感器获取与人体接触时的力反馈信息,操作者根据力反馈信息操控遥操作手柄调整机械臂不同位姿,对患者不同部位的按压深度进行实时调节,通过交互显示器观察患者各部位的超声信息,有效对患者胸外的各部位进行超声检查。
18.进一步地,当机器人切换为心肺复苏模式时,工作方法为:将心肺复苏机器人置于病床头侧,将病人置于平卧位,去枕,解开衣扣,松解腰带。
19.将机械臂末端更换为人体三维扫描仪扫描人体进行人体结构三维重建,对不同人体形体进行心肺复苏按压位置定位和按压深度确定。
20.将机械臂末端更换为仿手掌按压触头,调整按压参数,展开机体底部的t型固定脚架,通过机械臂末端更换的仿手掌按压触头对患者进行心肺复苏时的胸外按压。
21.将机械臂末端更换为红外线热成像仪对患者的皮肤表面进行热成像采集,用来观察患者的外周灌注情况,指导心肺复苏过程。
22.本发明的有益效果如下:1、本发明通过在机械臂末端设置探头更换装置,使所述机器人能够根据不同模式更换不同的探头,集成诊疗及心肺复苏等多种功能于一体,可协助医生对患者进行针对性的治疗,提高急诊科室的救治效率。
23.2、本发明通过设置多个激光雷达和多个超声波雷达,可为机器人自主移动提供所需的环境信息感知,通过设置多个摄像头,可为机器人自主移动提供所需的视觉信息感知,通过激光雷达、超声波雷达和摄像头的设置实现了机器人的无碰撞安全自主导航功能。
附图说明
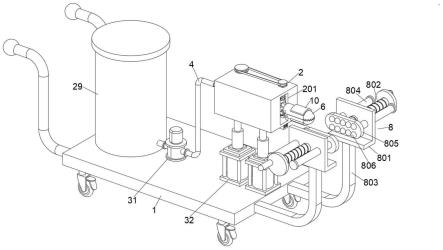
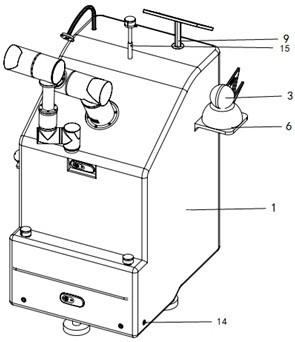
24.图1为本发明实施例中机器人的整体结构示意图;图2为本发明实施例中机器人的左侧结构示意图;图3为本发明实施例中机器人的正面结构示意图;图4为本发明实施例中机器人的右侧结构剖面图;其中:1、机体;2、探头支架;3、遥操作手柄;4、机械臂;5、可更换探头;5-1、仿手掌按压触头;5-2红外热成像仪;5-3、人体三维扫描仪;5-4、超声波探头; 6、手柄支架;7、探头更换装置;8、交互显示器;9、旋转底座;10、手动更换装置;11、伸缩软管;12、六维力传感器;13、激光雷达;14、超声波雷达;15、伸缩支架;16、摄像头;17、底盘;18、万向轮;19、万向轮连接架;20、轮毂电机;21、t型固定脚架;22、推车扶手;23、急停开关。
具体实施方式
25.下面结合附图与实施例对本发明进一步说明。
26.应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另
有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
27.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非本发明另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;为了方便叙述,本发明中如果出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.术语解释部分:本发明中的术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或为一体;可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介间接相连,可以是两个元件内部连接,或者两个元件的相互作用关系,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明的具体含义。
29.正如背景技术所介绍的,现有的诊疗或心肺复苏设备功能单一,无法满足医疗急救多方面的救治需求,为了解决如上的技术问题,本发明提出了一种用于诊疗和心肺复苏的多功能机器人。
30.本发明的一种典型的实施方式,如图1-图4所示,一种用于诊疗和心肺复苏的多功能机器人,包括机体1、探头支架2、遥操作手柄3和机械臂4,所述探头支架设置在机体侧面,用于放置多种可更换探头5,所述探头支架2上设置有多个与可更换探头5相适配圆形通孔,可更换探头5能够插入所述通孔中,实现所述可更换探头5的固定。
31.机体1上与探头支架2相对的一侧设置有遥操作手柄3,所述遥操作手柄3通过手柄支架6与机体连接。
32.所述遥操作手柄3具有力感知功能,能够实现机械臂4的高精度力位混合控制,当所述机器人切换为手动模式时,可通过遥操作手柄3对机械臂4进行精准的控制。
33.所述机械臂4设置在机体1前端,所述机械臂4的末端设置有探头更换装置7,所述探头更换装置7与探头支架2上放置的多种可更换探头5相匹配,使所述机械臂4的末端能够根据不同模式在多种可更换探头5之间快速更换。
34.所述机体1的顶部设置有交互显示器8,所述交互显示器8具备触摸功能和语音交互功能,能够作为操作者和机器人的交互媒介,可以显示机器人本体以及机器人采集到的各类信息,并设有多功能虚拟按键,可以通过交互显示器实现机器人的模式切换。
35.所述交互显示器8通过旋转底座9与机体1相连,所述旋转底座9包括支撑杆和安装杆,所述安装杆的一端与所述支撑杆相连,另一端与所述交互显示器8相连,通过旋转底座9可实现交互显示器8的任意角度旋转。
36.所述机体1顶部还设置有手动更换装置10,所述手动更换装置10通过伸缩软管11与机体1连接,操作者可对可更换探头5进行手动更换,实现操作者对患者身体的手动理疗和检查。
37.所述机械臂4的末端内置有六维力传感器12,当机械臂与人体接触时,通过内置的
六维力传感器12获取力反馈信息。
38.所述机体1上设置有多个激光雷达13和多个超声波雷达14,所述激光雷达13设置有三个,分别位于机体1顶部和前端,所述机体1顶部设置有一个激光雷达13,通过伸缩支架15与机体1相连,所述机体1前端设置有两个激光雷达13,分别位于机体1前端的两侧。所述超声波雷达14设置有四个,其中两个分别位于机体1两个侧面底部,另外两个设置在机体1前端下部两侧。所述激光雷达13和超声波雷达14可为机器人自主移动提供所需的环境信息感知。
39.所述机体1上还设置有两个摄像头16,在机体1前端呈上下排布,所述摄像头16为机器人自主移动提供所需的视觉信息感知。
40.通过激光雷达13、超声波雷达14和摄像头16的设置实现了机器人的无碰撞安全自主导航功能。
41.所述探头支架2上放置的多种可更换探头5分别为仿手掌按压触头5-1、红外热成像仪5-2、人体三维扫描仪5-3、超声波探头5-4。所述仿手掌按压触头5-1用于与人体接触按压,对人体进行心肺复苏;所述红外热成像仪5-2用于获取人体皮肤表面温度,所述人体三维扫描仪5-3用于获取人体三维形态特征,所述超声波探头5-4用于与人体接触,对人体进行超声信息采集。
42.所述机体1底部设置有底盘17,所述底盘上对称设置有四个万向轮18,所述万向轮18通过万向轮连接架19与机体1相连,位于机体前端的两个万向轮大于位于机体后端的两个万向轮,位于机体前端的两个万向轮与轮毂电机20相连,提供机器人自主移动时所需的动力输出。
43.所述底盘17上还对称设置有多个t型固定脚架21,所述t型固定脚架21为可伸缩设置,能够在机器人进行心肺复苏时提供支撑。
44.所述机体1的后端设置有推车扶手22,用于手动推动机器人进行转移。
45.所述机体1侧面还设置有急停开关23,能够实现所述机器人的紧急停止。
46.本发明提供的机器人可以在超声诊疗模式与心肺复苏模式之间切换。
47.当切换到超声诊疗模式对患者进行超声诊疗时,工作方法为:将机器人置于病床侧,将病人置于平卧位,将机械臂末端更换超声波探头,通过机械臂末端内置的六维力传感器获取与人体接触时的力反馈信息,操作者操控力反馈手柄调整机械臂不同位姿,对患者不同部位的按压深度进行实时调节,通过交互显示器观察患者各部位的超声信息,有效对患者胸外的各部位进行超声检查。
48.当切换到心肺复苏模式对患者进行心肺复苏时,工作方法为:将心肺复苏机器人置于病床头侧,将病人置于平卧位,去枕,解开衣扣,松解腰带。机械臂末端更换为人体三维扫描仪扫描人体进行人体结构三维重建,对不同人体形体进行心肺复苏按压位置定位和按压深度确定。
49.将机械臂末端更换为仿手掌按压触头,调整按压参数,支持手动设定参数,推荐按压参数为:位置在胸骨中下1/3处,向下按压胸骨深度为成人 5cm-6cm,每次按压后,释放对胸部的所有压力,而不失去机械臂与胸部的接触,按压频率为100次/分-120次/分。
50.在启动心肺复苏模式时,机体底部t型固定脚架自动展开,保证按压实施过程机体无位移,通过机械臂末端更换的仿手掌按压触头对患者进行心肺复苏时的胸外按压。按压
频率100-120次/分,对患者实施有效地心肺复苏过程。
51.另外,机械臂末端更换为红外线热成像仪可对患者的皮肤表面进行热成像采集,用来观察患者的外周灌注情况,指导心肺复苏过程。
52.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。