用于医疗呼吸机的气体混合系统
1.相关申请的交叉引用
2.本技术作为pct国际专利申请提交于2021年4月9日并要求提交于2020年4月10日的标题为“用于增加呼吸机氧浓度的系统和方法(systems and methods for increasing ventilator oxygen concentration)”的美国临时申请序列号63/008,508和提交于2020年9月17日的标题为“用于医疗呼吸机的气体混合系统(gas mixing system for medical ventilator)”的美国临时申请序列号63/079,518号的权益;本技术的全部公开内容在此以引用方式并入本文。
背景技术:
3.医疗呼吸机系统用于为医院、护理机构、手术中心和其他临床环境中的患者提供辅助呼吸。一些呼吸机包括鼓风机,该鼓风机产生加压空气以提供给患者。根据患者的具体情况,环境空气富含氧气,并将空气混合物提供给患者。期望输送给患者的氧浓度可以取决于具体的患者或患者的病症。
4.这些呼吸器通过具有吸气肢和呼气肢的呼吸软管(通常称为回路)连接到患者。吸入气体通过吸气肢从呼吸机流向患者,并且呼出气体通过呼气肢从患者流回呼吸机。在患者处,呼吸回路连接到患者接口(如面罩、鼻套管、气管内导管或气管切开插管)。
5.正是关于这些和其他一般考虑,提出了本文公开的方面。此外,尽管可能讨论了相对具体的问题,但是应当理解,这些示例不应当限于解决在背景技术中或本公开的其他地方确定的具体问题。
技术实现要素:
6.本公开的示例描述了用于增加医疗呼吸机的氧浓度的系统和方法。在一个方面,本技术涉及一种用于增加氧浓度的系统。该系统包括氧阀,其被配置成联接至氧源;氧气增压室,其联接至所述阀;和混合阀。混合阀包括氧气入口,其联接至氧气增压室;环境空气入口;和出口,其被配置成附接到呼吸机的鼓风机的入口。在一个示例中,氧阀是比例阀。在另一示例中,混合阀是手动混合阀或机电混合阀中的一种,该手动混合阀或机电混合阀由来自微处理器的信号基于用户设定值来控制。在又一示例中,该系统还包括用于控制混合阀的刻度盘,其中刻度盘的不同设置对应于在混合阀出口处提供的不同氧浓度。在又一示例中,该系统还包括联接至氧气增压室的压力传感器。在另一示例中,压力传感器被配置成测量氧气增压室的气体和环境空气之间的压差。
7.在另一示例中,该系统还包括控制装置,该控制装置被配置成执行一组操作(包括接收由压力传感器测量的压差);以及基于所测量的压差,产生控制信号以控制氧气阀,从而保持氧气增压室内的气体的目标压力。在又一示例中,测量的压差低于目标压力;并且控制信号被配置为打开氧阀。在又另一示例中,测量的压差高于目标压力;并且控制信号被配置为关闭氧阀。
8.在另一示例中,目标压力小于或等于0.5英寸水柱。在另一示例中,混合阀的环境
空气入口还包括止回阀,以防止氧气从氧气增压室流过环境空气入口。在又一示例中,该系统还包括止回阀或减压阀中的至少一个,该止回阀或减压阀联接至氧气增压室以释放氧气增压室中的气体压力。
9.在另一方面,本技术涉及一种用于增加氧浓度的系统。该系统包括被配置成联接至氧源的氧阀,联接至该阀的氧气增压室和混合阀。混合阀包括氧气入口,其联接至氧气增压室;环境空气入口;和出口,其被配置成附接到呼吸机的鼓风机的入口。该系统还包括联接至氧气增压室的压力传感器。该压力传感器被配置成测量氧气增压室的气体和环境空气之间的压差。该系统还包括以通信方式联接至压力传感器和氧阀的控制装置。该控制装置被配置成执行一组操作。这些操作包括接收由压力传感器测量的压差;以及基于所测量的压差,产生控制信号以控制氧气阀,从而保持氧气增压室内的气体的目标压力。
10.在一个示例中,测量的压差低于目标压力;并且控制信号被配置为打开氧阀。在另一示例中,测量的压差高于目标压力;并且控制信号被配置为关闭氧阀。在又一示例中,目标压力小于或等于0.5英寸水柱。
11.在另一方面,本技术涉及一种用于增加氧浓度的方法。该方法包括以下步骤:通过压力传感器测量环境空气和氧气增压室中的气体之间的第一压差;基于该第一压差,由控制装置产生第一控制信号;将第一控制信号传输到氧阀,以使氧阀改变位置,从而影响氧气流入氧气增压室;通过压力传感器测量环境空气和氧气增压室中的气体之间的第二压差;基于该第二压差,由控制装置产生第二控制信号;并且将第二控制信号传输到氧阀,以使氧阀改变位置,从而影响氧气流入氧气增压室。
12.在一个示例中,生成第一控制信号还基于第一压差和目标压力的比较;并且生成第二控制信号还基于第二压差和目标压力的比较。在另一示例中,目标压力小于或等于0.5英寸水柱。在又一示例中,第一压差小于目标压力,并且第一控制信号被配置成使氧阀打开。在又一示例中,第二压差大于目标压力,并且第二控制信号被配置成使氧阀关闭。在另一示例中,该方法还包括改变联接至氧气增压室的混合阀的设置,以改变从混合阀提供的氧浓度。
13.在一个方面,该技术涉及一种医疗呼吸机系统,其包括呼吸机,该呼吸机包括第一环境气体入口、吸气端口、呼气端口和鼓风机,其中鼓风机位于第一环境气体入口和吸气端口之间的气体流路中。该系统还包括氧气调节器,该氧气调节器包括氧气入口、第二环境气体入口、混合阀和混合气体出口,其中混合阀将来自氧气入口的氧气和来自第二环境气体入口的气体组合成提供给混合气体出口的混合气体。该系统还包括在呼吸机和氧气调节器之间的流体联接,用于将氧气调节器的混合气体出口联接至呼吸机的第一环境气体入口。
14.在一个示例中,鼓风机以可操作的方式向呼吸机的第一环境气体入口施加负压,并且其中负压通过流体联接被施加到氧气调节器的混合气体出口。在另一示例中,通过混合阀进一步将负压施加到氧气调节器的第二环境气体入口。在又一示例中,氧气调节器还包括混合阀上游的增压室,以及增压室和氧气入口之间的压力调节阀。在又一示例中,氧气调节器包括具有旋钮或硬件输入的外壳,该旋钮或硬件输入联接至混合阀以调节混合阀。在另一示例中,呼吸机包括安装到氧气调节器的接口。在又另一示例中,氧气调节器包括刚性壳体,该刚性壳体包括在氧气入口与混合阀之间的中空增压室。
15.在另一方面,本技术涉及用于改装基于鼓风机的医疗呼吸机的气体调节器。气体
调节器包括外壳,该外壳包括压缩气体入口、环境气体入口和混合气体出口。气体调节器还包括:增压室,其由外壳限定;混合阀,其位于增压室和混合气体出口之间;压力调节阀,其位于增压室和压缩气体入口之间;和控制器,其可操作地联接至压力调节阀。
16.在一个示例中,气体调节器还包括压力传感器,该压力传感器测量增压室内部的压缩气体的压力。在另一示例中,控制器从压力传感器接收所测量的压力。在另一示例中,控制器被编程为在确定所测量的压力小于阈值时调节压力调节阀。在又一示例中,气体调节器还包括机械联接至混合阀的用户可调硬件输入。
17.在另一方面,本技术涉及一种用于调节基于鼓风机的医疗呼吸机的呼吸气体的方法。该方法包括以下步骤:以第一比率混合室内空气和氧气,以在基于鼓风机的呼吸器上游的气体流路中形成第一呼吸气体;将第一呼吸气体引入基于鼓风机的医疗呼吸机的入口;对基于鼓风机的医疗呼吸机内部的第一呼吸气体进行加压,并将加压的第一呼吸气体提供给基于鼓风机的医疗呼吸机的吸气端口;在基于鼓风机的呼吸机的上游,将第一比率调节至不同于第一比率的第二比率;以及以第二比率混合室内空气和氧气以形成第二呼吸气体,并将第二呼吸气体引入基于鼓风机的医疗呼吸机的入口。在一个示例中,将第一呼吸气体引入基于鼓风机的医疗呼吸机的入口包括将气体调节器的出口连接到基于鼓风机的医疗呼吸机的入口。
18.在另一方面,本技术涉及一种配置医疗呼吸机的方法。该方法包括以下步骤:提供包括氧气入口、空气入口、混合阀和混合气体出口的气体调节器;将压缩氧气源流体联接至气体调节器的氧气入口;以及将气体调节器的混合气体出口流体联接至医疗呼吸机的环境气体入口。该方法还包括以下步骤:操作混合阀以将压缩氧气与来自空气入口的空气以第一比率混合,以形成混合气体;以及将混合气体提供给医疗呼吸机的环境气体入口。
19.在一个示例中,呼吸机包括高压氧入口,并且该方法还包括关闭呼吸机的高压氧入口。在另一个示例中,该方法还包括:在气体调节器内部将压缩氧气的压力从第一压力调节,并以不同于第一压力的第二压力提供混合气体。在另一示例中,第二压力低于第一压力。在又一示例中,该方法还包括:将呼吸机内的混合气体的压力调节至不同于第二压力的第三压力,并将加压混合气体提供至呼吸机的吸气端口以输送至患者。在又一示例中,第三压力高于第二压力。在又另一示例中,该方法还包括:测量混合气体或加压混合气体中的氧浓度百分比(fio2),并根据所测量的fio2调节混合阀。在另一示例中,该方法包括:将气体调节器的混合气体出口从医疗呼吸机的环境气体入口分离,并且独立于气体调节器操作医疗呼吸机。
20.提供此发明内容是为了以简化的形式介绍下文的具体实施方式中进一步描述的一系列概念。本发明内容不旨在用于确定权利要求的主题的主要或基本特征,也不旨在用于限制权利要求主题的范围。示例的另外的方面、特征和/或优点将在以下说明中部分阐述,并且将部分地通过说明而显而易见,或者可以通过实践本公开进行了解。
附图说明
21.参考以下附图描述了非限制性和非详尽示例。
22.图1描绘了用于增加氧浓度的示例系统。
23.图2描绘了用于增加氧浓度的另一示例系统。
24.图3描绘了用于增加氧浓度的示例方法。
25.图4描绘了用于增加氧浓度的另一示例方法。
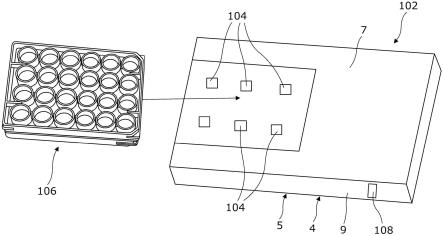
26.图5是根据本公开的一个实施方案的呼吸机系统的透视图。
27.图6a是根据本公开的一个实施方案的呼吸机系统的透视图。
28.图6b为根据本公开的一个实施方案的呼吸机和气体调节器的分解图。
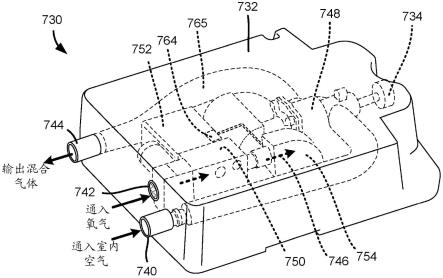
29.图7为根据本公开的一个实施方案的气体调节器的内部透视图。
30.图8是根据本公开的一个实施方案的气体调节器的部件的局部透视图。
31.图9为根据本公开的一个实施方案的气体调节器的内部俯视图。
32.图10是根据本公开的一个实施方案的混合阀和气流路径的侧视图。
33.图11是根据本公开的一个实施方案的呼吸机系统的框图。
34.图12是根据本公开的一个实施方案的呼吸机系统的框图。
35.图13是根据本公开的一个实施方案的一种配置具有环境气体入口的医疗呼吸机的方法的流程图。
36.图14是根据本公开的一个实施方案的一种用于调节基于鼓风机的医疗呼吸机的呼吸气体的方法的流程图。
37.图15、图16和图17是图7、图8和图9的替代实施方案,其中对阀的放置和其它内部联接和部件进行了一些调节。
具体实施方式
38.如上所述,一些呼吸机包括将环境空气提供给呼吸机并最终提供给患者的鼓风机。这些呼吸器中的一些还可以包括用于接收低压浓缩氧的输入。然而,这种呼吸机可能在能够提供给患者的氧浓度量方面受到限制。例如,输送给患者的氧浓度可能被限制在接近50%或更低的范围内。较低的氧浓度可能不适用于治疗患有最好用较高的氧浓度(例如95%和更高)治疗的病症的患者。因此,需要对呼吸机进行改进以提高氧浓度。
39.在其他益处中,本技术提供了增加具有鼓风机的呼吸机中氧浓度的解决方案。本技术将鼓风机入口处的空气与额外的氧气一起富集。因此,当鼓风机启动时,由鼓风机推动的空气具有高的氧浓度,从而导致最终提供给患者的氧浓度更高。为了在鼓风机处提供富氧空气,本技术可以主动控制充氧增压室的压力。然后,增压室内的气体通过混合阀被提供给鼓风机的入口。混合阀可用于设置需要提供给鼓风机的氧浓度。通过主动控制增压室中的气体压力,在鼓风机入口处提供的气体压力可以保持大于环境压力。另外,增压室中气体的压力可以维持在大量氧气不会被排放到环境空气中的水平,并且鼓风机和呼吸机控制都不受到从增压室提供的气体的显著影响。
40.图1描绘了一种用于增加氧浓度的示例系统100。系统100可以附接或联接至呼吸机的鼓风机的入口,以增加可由呼吸机可提供的氧浓度。系统100包括由加压氧源102填充或加压的氧气增压室106。来自氧源102的氧气流由氧阀104控制。阀104可以是任何适于控制气体流动的阀。在一些示例中,阀104可以是比例电磁(psol)阀,其中流量可以成比例地调节。在其他示例中,阀104可以是完全打开或完全关闭的阀。
41.增压室106中的气体压力可由控制回路控制,该控制回路至少包括压力传感器110和控制装置112。压力传感器110可测量增压室106中的气体压力。气体压力的测量可以相对
于环境压力(如环境空气和增压室中的气体之间的压差)。可以靶向增压室106中的气体的特定压力。例如,目标压力可以比环境压力高小于约1.0英寸水柱(2.52厘米水柱)。在一些情况下,增压室106中气体的目标压力可以小于或等于约0.5英寸水柱(1.27厘米水柱)或小于或等于约0.2英寸水柱(0.5厘米水柱)。因此,目标压力并不显著高于环境空气。目标压力的目的是在鼓风机的入口处维持来自增压室106的气体的低压。通过维持低压(而不是高压),将氧气排放到环境空气中从而减少浪费。此外,高压气体可能会对鼓风机或呼吸机的操作产生负面影响。例如,如果将高压气体施加到鼓风机,那么最终提供给患者的气体可能以过高的压力提供,和/或呼吸机的控制算法可能由于在鼓风机的入口处提供的高压气体而发生故障。随着本技术的低压增加,除了能够输送更高的氧气浓度之外,鼓风机和呼吸机基本上不受影响。
42.在一些示例中,目标压力也可以略小于环境压力。在此类示例中,当感测到由鼓风机入口真空引起的轻微负压时,氧阀104仅打开以给增压室106充气。例如,当鼓风机被开启时,气体被从增压室106中抽出,并且可以在增压室106内产生小于环境压力的压力。在具有轻微负压触发氧阀104打开的示例中,在增压室106的下游和混合阀108的上游可以包括止回阀。止回阀可防止环境空气通过混合阀108回流到增压室106中存在的轻微真空中。例如,目标压力可以在约0.0至-0.1英寸水柱或0.0至-0.2英寸水柱之间。可使用其他目标压力。当呼吸机输送一次呼吸,导致鼓风机加速时,鼓风机入口处的压力是约1英寸水柱的轻微真空。压力传感器110检测到增压室106中的压力低于目标压力,并且控制装置112向氧阀104发送信号以将其打开,从而对增压室106进行充气。
43.控制回路包括控制装置112。控制装置112从压力传感器110接收增压室106中的气体压力的压力测量值。基于从压力传感器110接收的压力测量值,控制装置112产生控制信号以改变阀104的位置。例如,如果气体压力下降到目标压力以下,则控制装置112产生控制信号以打开阀门,从而允许更多的氧气流入增压室106。相反,如果气体压力增加到高于目标压力,则控制装置112产生控制信号以关闭阀门,从而减少或停止氧气从氧源102流入增压室106。控制装置112以通信方式联接到阀104,以允许从控制装置112生成的控制信号被发送到阀104。
44.在阀104是psol阀或其他比例阀的示例(其中阀104的位置可以设置在全开位置和全闭位置之间)中,来自控制装置112的控制信号可以使阀104打开或关闭的量小于阀104的整个开关范围。在阀104全开或全闭的示例中,来自控制装置112的控制信号可以使阀104全开或全闭。对于这种全开或全闭的双位阀,可以采用滞后回线来防止状态之间的持续或快速切换。在这种示例中,在增压室106中气体的目标压力附近,滞后带可以是约0.1英寸水柱或0.05英寸水柱。因此,无论使用何种类型的阀104,阀104都可以由控制装置112控制,以维持氧气增压室内的目标气体压力。在一些示例中,控制回路相对较快,并且控制装置112可以每毫秒或更快地处理压力测量值并产生阀控制信号。
45.在一些实施方式中,比例阀(如psol)可以是优选的,以允许对增压室106中的压力进行更精确的控制。此外,比例阀的使用有助于防止阀104的快速全开和全闭,这可能导致阀的金属部件以很大的力相互碰撞。这种冲击在富氧环境中可能是不利的。
46.控制装置112可以包括存储器114和至少一个处理器116。例如,存储器114可以存储指令,该指令在由处理器116执行时使控制装置112执行本文所述的操作。在一些示例中,
控制装置112可以是微型计算机或微控制器,例如可从马萨诸塞州的arduino ag或somerville获得的arduino nano微控制器。在其他示例中,控制装置112可以是集成电路(ic)、可编程序逻辑器件(pld)或现场可编程门阵列(fpga)以及其他可能的配置或实施方式。控制回路也可以是比例积分微分(pid)回路,并且控制装置112可以是pid控制器。
47.混合阀108可用于将来自增压室106的氧气与环境空气混合,以实现期望的氧气浓度。混合阀108可以包括从增压室106接收氧气的第一入口和向环境空气开放的第二入口。混合阀108使得来自增压室106的氧气与环境空气混合,并且混合阀108通过出口提供气体混合物,该出口被配置为联接至呼吸机的鼓风机入口。作为一个示例,刻度盘可以连接到混合阀108,其允许选择或设置各种氧气浓度水平。通过移动刻度盘来增加氧气浓度水平,调节混合阀来增加来自增压室106的氧气流量(与环境空气流量相比)。与将环境空气联接至混合阀108的输出的孔的面积相比,这种调节可以通过改变将增压室106联接至混合阀108的输出的孔的面积来实现。在一些示例中,可以基于期望的氧浓度水平以电子方式控制混合阀108。期望的氧浓度水平可作为信号从呼吸机、控制装置112或另一装置接收,该另一装置能够接收期望的氧浓度水平作为输入并产生对应于该浓度水平的信号以控制混合阀108。
48.在操作中,当系统连接到呼吸机的鼓风机时,鼓风机可以开始向连接到呼吸机的患者提供呼吸。鼓风机可以包括风扇,该风扇基于待输送给患者的呼吸的特征(如呼吸容量、压力目标、流量目标等)在某一速度下旋转一段时间。当鼓风机启动时,来自混合阀108的气体混合物通过鼓风机的入口吸入。当气体混合物通过混合阀108吸入时,增压室206中的气体压力下降。由压力传感器110测量压力压降,并且将相应的压力测量值提供给控制装置112。然后,控制装置112生成控制信号以将阀104至少部分地打开,以允许氧气从氧源102流入增压室106以升高压力。
49.值得注意的是,系统100可以与设置为处理最大氧浓度(如100%氧气)的鼓风机兼容,该最大氧浓度将由系统100提供到鼓风机。如果未将鼓风机设为处理富氧输入,则燃烧风险可能会增加。
50.图2描绘了用于增加氧浓度的另一示例系统200。系统200是上文所讨论并在图1中描绘的系统100的具体示例实施方式。系统200包括psol阀204,其控制氧气从氧源202到氧气增压室206的流动。氧源202可以提供压力在35-120磅/平方英寸(psig)之间的氧气。调节器也可以结合到或连接到氧源202,以调节氧源202提供的压力。在使用比例阀(如psol阀204)的示例中,调节器可能不是必需的,因为可以将psol阀204设置为具有小或大的开口,以应对来自氧源202的各种输入压力。psol阀可以由电源228供电。在所描绘的示例中,电源的正极端子连接到psol阀204,并且电源的负极端子连接到地线。
51.示例中的氧气增压室206可以具有约1升的容积,但是增压室206的容积在不同的示例中可以不同。增压室206的大小可以基于由呼吸机提供的呼吸容量。增压室206的大小也可以基于从氧源202获得的压力。在一些示例中,可能期望维持增压室206的氧饱和度,从而确定增压室206的大小。
52.增压室206的出口联接至混合阀208的氧气入口207。混合阀208还包括向环境空气开放的环境空气入口209。混合阀208还包括出口213,以向呼吸机的鼓风机入口提供气体混合物。图2所描绘的示例中的混合阀208是手动混合阀。来自氧气入口207的氧气和来自环境
空气入口209的环境空气的混合物可以通过旋转阀构件211来控制,该阀构件可以是“挡板”。通过旋转阀构件211,入口207和出口213之间的孔的面积与入口209和出口213之间的孔的面积同时改变。因此,通过出口213提供的氧气和环境空气的混合物(例如,气体混合物的氧浓度)可以通过旋转阀构件211来调节。在一些示例中,阀构件211可以通过旋转刻度盘来手动旋转。刻度盘可以具有对应于在混合阀208的出口213处提供的气体混合物的氧浓度的多个设置。刻度盘的每一个设置都将阀构件211定位,使得混合阀208提供设定的氧浓度。混合阀208也可以是“滑阀”类型,其中轴的线性动作移动滑阀穿过三通阀的端口,以实现相同的混合功能。
53.在一些示例中,环境空气入口209还可以包括空气过滤器218以过滤环境空气。环境空气入口209还可以包括止回阀220,该止回阀防止氧气从增压室206流过环境空气入口209。在一些示例中,可以省略止回阀220。即使省略了止回阀220,由于增压室206中的气体和环境空气之间相对较小的压差,流出环境空气入口209的氧气量也是有限的。在包括止回阀220的示例中,止回阀和/或减压阀222也可以连接到增压室206,以防止增压室206的过压或欠压。氧气的过压可能引入不期望的危险,影响呼吸机的控制算法,和/或影响输送给患者的呼吸的压力、流量和/或呼吸容量。在一些示例中,可以将止回阀和/或减压阀222设置为释放增压室206中高于环境气压5厘米水柱的任何气压。类似地,如果增压室206中的气体压力小于低于环境空气压力的5厘米水柱,则可将止回阀和/或减压阀222设置为允许气体流入增压室206。
54.系统200还包括差压传感器210。压差传感器测量环境空气压力和增压室206中气体压力之间的压差。传感器210包括用于环境空气的输入,该输入可以是向环境空气开放的端口。传感器210还包括气动联接至增压室206的输入,以允许由传感器210测量压差。环境空气和增压室206中的气体之间的测量压差从传感器210提供至控制装置212。作为一个具体示例,传感器210可以是可从马萨诸塞州阿特尔伯勒的sensata technologies获得的p993压力传感器。
55.在所描绘示例中,控制装置212是arduino nano。传感器210可以连接到控制装置212的 5v引脚和输入引脚,如a5引脚。传感器210和控制装置212也可以连接到公共地线。控制装置212如上文所论述进行操作。例如,基于测量的压差,生成控制信号以使psol阀204向关闭位置或打开位置移动。为了向psol阀提供控制信号,可以将控制装置的输出(如arduino nano的d9中的输出)联接至晶体管226的栅极(g)。然后,晶体管226的漏极(d)联接至psol阀204的负极端子,并且晶体管226的源极(s)连接到地线。晶体管226可以是n沟道增强型场效应管(mosfet)。作为一个具体的示例,晶体管可以是瑞士日内瓦的意法半导体(stmicroelectronics)公司生产的std12nf06l-1功率mosfet。源极(s)和栅极(g)也可以通过电阻器224连接。在一个具体示例中,电阻器可以具有56kω的电阻。恢复二极管或整流器230可以包括在psol阀204的正输入端和负输入端之间。在一个具体示例中,整流器230可以是可从亚利桑那州凤凰城的安森美半导体公司(on semiconductor)获得的1n4005恢复二极管。
56.图3描绘了用于增加要提供给呼吸机的鼓风机入口的氧浓度的示例方法300。在步骤302中,测量环境空气和氧气增压室内部的气体之间的压差。压差可以通过压力传感器测量。在步骤304中,确定测量的压差是否大于氧气增压室中气体的目标压力。可以由控制装
置进行该确定。如果在步骤304中确定压差大于目标压力,则方法300前进至步骤306,该步骤中,控制装置产生控制信号以关闭氧阀,该氧阀控制氧气从氧源流入氧气增压室。控制信号可以被配置为全关阀门或部分关闭氧阀。在步骤308中,氧阀接收控制信号并且根据控制信号关闭。在步骤308之后,方法300返回到步骤302,其中重复进行方法300。
57.如果在步骤304中确定压差大于目标压力,则方法300前进至步骤310,该步骤中,控制装置产生控制信号以打开氧阀。在步骤312中,氧阀接收控制信号并且根据控制信号打开。在步骤308之后,方法300返回到步骤302,其中重复进行方法300。
58.图4描绘了用于增加要提供给呼吸机的鼓风机入口的氧浓度的另一示例方法400。在步骤402中,通过压力传感器测量环境空气和氧气增压室中的气体之间的第一压差。在步骤404中,由控制装置将测量的第一压差与用于氧气增压室的目标压力进行比较。在步骤406中,由控制装置生成用于氧阀的第一控制信号。第一控制信号的生成基于第一压差和/或在步骤404中进行的比较。在步骤408中,将第一控制信号传输到氧阀,以使氧阀改变位置来影响氧气流入氧气增压室。作为一个示例,如果步骤404中的比较指示第一压差小于目标压力,则第一控制信号被配置成使氧阀打开。
59.在步骤410中,通过压力传感器测量环境空气和氧气增压室中的气体之间的第二压差。第二压差可以在第一压差测量之后立即测量,或者在第一压差测量之后的相当长的时间(例如,大于5秒)之后测量。因此,在第一压差测量值和第二压差测量值之间可以具有或不具有额外的压差测量值。在步骤412中,由控制装置将测量的第二压差与氧气增压室的目标压力进行比较。在步骤414中,由控制装置生成第二控制信号。第二控制信号的生成基于第二压差和/或在步骤412中进行的比较。在步骤416中,将第二控制信号传输到氧阀,以使氧阀改变位置来影响氧气流入氧气增压室。
60.根据一个实施方案,在图5中示出了医疗呼吸机系统500。系统500包括呼吸机510和双肢呼吸回路520。呼吸机510包括吸气端口512、呼气端口514和显示屏517。呼吸回路520包括将呼吸气体从吸气端口512运送到患者的吸气肢522,以及将呼出气体从患者运送到呼气端口514的呼气肢524。两个肢522、524通过y形管516连接,y形管又连接到患者接口(如面罩、气管内导管或应用于患者的其他气道接口)。
61.医疗呼吸机在吸气端口提供压力高于大气压的加压呼吸气体,以将气体输送到患者的肺部。吸入呼吸气体中增加的压力可以来自呼吸机外部的高压源(如医疗机构的壁装电源插座中的加压气体,或者加压气体罐、瓶或罐),或者来自呼吸机上的部件(如机载压缩机或鼓风机)施加的压力。在后一种情况下,呼吸机吸入环境空气(如室内空气),并在将空气提供给吸气端口以输送给患者之前对空气加压。
62.在一个实施方案中,医疗呼吸机系统包括具有第一环境气体入口、吸气端口、呼气端口和鼓风机的呼吸机。鼓风机位于第一环境气体入口和吸气端口之间的气流路径中。该系统还包括具有氧气入口、第二环境气体入口、混合阀和混合气体出口的氧气调节器。混合阀将来自氧气入口的氧气和来自第二环境气体入口的气体组合成提供给混合气体出口的混合气体。该系统还包括在呼吸机和氧气调节器之间的流体联接,用于将氧气调节器的混合气体出口联接至呼吸机的第一环境气体入口。
63.在一个实施方案中,呼吸机510是基于鼓风机的呼吸机,其从环境空气(如室内空气)向吸气端口512提供加压呼吸气体。如图5所示,呼吸机510包括一个环境空气入口518。
呼吸机内部的鼓风机通过气体入口518将室内空气吸入呼吸机,对空气加压,并将加压空气提供到吸气端口512。环境气体入口518以等于或约等于大气压的压力吸入空气。
64.根据一个实施方案,提供气体混合器或调节器,以通过调节呼吸机上游的空气的混合并将混合空气提供给呼吸机的环境空气入口来调节基于鼓风机的呼吸机的环境空气的氧浓度。以此方式,在有或没有气体调节器的情况下,呼吸机可以独立于气体调节器运行。当使用气体调节器时,其提供了调节和控制由基于鼓风机的呼吸机输送的呼吸气体成分的附加能力。
65.图6a示出了包括呼吸机610和气体(如氧气)调节器630的系统600的实施方案。呼吸机610包含吸气端口612和呼气端口614。气体调节器包括外壳632和用于控制调节器的用户可调旋钮634(或其他硬件输入,如按钮、手柄、刻度盘、杠杆或类似机构)。在所示的实施方案中,外壳632被成形为用于呼吸机的基座636,通过将呼吸机的底面附接到基座的顶面,该呼吸机被安装到基座636上。基座636还包括用于承载组合单元的手柄638。任选地,如图6b所示,气体调节器可以通过诸如配合表面或附接板609的接口安装到呼吸机。将板609安装在呼吸机的底部和调节器的顶部。
66.图7示出了根据一个实施方案的具有外壳732的氧气调节器730的透视图。外壳732在图7中被描绘为透明的,以便显示调节器730的内部组件。调节器730包括环境空气入口740、氧气入口742和混合空气出口744。混合空气出口744联接至呼吸机的气体入口(如图5中的气体入口518),以将经调节的混合气体从调节器提供到呼吸机中。在图7中,例如通过将氧气罐、瓶、罐或管路连接到氧气入口742,氧气从氧气入口742进入调节器。氧气通过氧气流动路径746流过调节器到达混合阀748。环境空气(如室内空气)在入口740处进入调节器并且流到混合阀748。混合阀748将环境空气和氧气混合到期望的氧气与空气的比率(吸入氧气的分数百分比(fio2)),并通过导管765将fio2比率下的混合气体输送到混合气体出口744。
67.在一个实施方案中,用户可以通过调节旋钮734来调节fio2,其中该旋钮转动混合阀748以允许相对更多或更少的氧气进入混合物。在一个实施方案中,混合阀748是球形阀。球形阀完全由机械控制,并向旋钮734的旋转提供大体上线性的响应。其他类型的气体混合阀(包括例如软件控制的自动阀)也可能是合适的。
68.在一个实施方案中,与室内空气入口740处的大气压力相比,气体调节器730在氧气入口742处以相对高的压力接收氧气。例如,气体调节器730可以接收来自医疗气体源(如医院的壁装电源插座)的压缩氧气,这些气体源可以以35-80psi的压力提供氧气。气体调节器730调节并降低该压力,以在出口744处以较低压力提供混合气体,如在大气压或接近大气压(如高于大气压力0-2厘米水柱压差计示压力(例如,0.25厘米水柱压差计示压力))下。这种压力调节的一个优点是:混合气体出口744可以连接到呼吸机的环境气体入口,其可以被设计成与大气压力接合。这可以允许氧气调节器的实施方案与现有的呼吸机一起使用,而不需要对呼吸机进行实质性的修改。因此,气体调节器拦截高压氧,将其与空气以期望的fio2比率混合,然后在大气压或接近大气压下将混合气体输送到呼吸机。
69.在一个实施方案中,压力调节阀设置在氧气流动路径746中,以调节和降低进入的氧气的压力。在图7所示的实施方案中,压力调节阀是比例电磁阀(psol)750,其串联在氧气入口742和混合阀748之间的流动路径中。psol 750由控制器752操作,该控制器打开和关闭
psol 750以实现目标压力(如等于或刚好高于当地大气压的压力)。氧气离开psol 750并进入储氧器754(如由外壳732限定的开放空间或增压室)。氧气在大气压或接近大气压或略高于大气压的压力下聚集在该储氧器754中。可以将氧气从储氧器754吸入混合阀748中,在混合阀中,氧气与来自空气入口740的大气相交以形成混合气体,该混合气体被提供至混合阀下游的混合气体出口744。
70.图8示出了氧气流动路径和增压室的另一视图。在此实施方案中,储氧器754形成为中空模制件756内部的开放空间或增压室。模制件756位于调节器的外壳732内部。如图8所示,模制件756形成有入口754a和出口754b。入口754a连接到psol 750的出口。出口754b连接到球形阀748的入口。因此,氧气流动路径746从氧气入口742穿过psol 750,穿过储氧器入口754a进入储氧器754,穿过储氧器出口754b,并进入混合阀748。在此实施方案中,为了安全起见,模制件756形成有一个或多个减压阀(如一个或多个真空减压阀和一个或多个高压减压阀)。在所示的示例中,模制件756具有三个真空减压阀760和一个高压减压阀762。当储氧器754内部存在足够量的真空时,真空减压阀760打开,以将储氧器754向大气开放,并允许空气被吸入储氧器754并进入流向呼吸机的流动路径。这是一种安全机制,在调节器出现故障(如psol 750锁定在关闭位置)时,允许空气进入呼吸机,使患者能够继续呼吸。在相反的情况下,当储氧器754内部积聚足够量的高压时,一个或多个高压减压阀762打开。在这种情况下,阀762打开以将高压释放到大气中。这是一种安全机制,在调节器出现故障(如psol 750锁定在打开位置)时,允许空气排出增压室,以防止患者通气管路过压。
71.提供压力传感器764来测量储氧器754内的氧气压力。压力传感器764可以位于任何合适的点,该点可以测量或采样储氧器的增压室或开放空间(如模制件756内部的空间)内的气体压力。在一个实施方案中,压力传感器764安装在控制器752上或与控制器752集成在一起,并连接到储氧器754中的压力端口(在图7中以虚线示出)。在一个实施方案中,压力端口与psol 750分离,以减少psol对压力传感器处的测量值的影响。从psol 750排出的氧气可以是湍流的,并且压力端口与psol 750间隔开,使得来自传感器764的压力信号避免了来自psol出口处的湍流气体的一些波动。来自压力传感器764的测量值被提供给控制器752以控制psol 750。当储氧器754中的压力下降到低于阈值(如差压计压力(如高于当地大气压0.25厘米水柱))时,控制器752打开psol 750以重新填充储氧器754,直到再次达到阈值。该控制循环在储氧器754内部维持足够的氧气供应,以响应呼吸机的呼吸需求。储氧器754提供氧气供应,该氧气供应准备好被吸入混合阀以输送给呼吸机和患者。当呼吸机或患者开始新的呼吸或新的吸入循环时,这种现成的氧气供应可根据需要获得。当氧气耗尽时,压力下降,来自压力传感器764的信号记录该压力下降,并且控制器通过打开psol来重新填充储氧器而做出响应。psol的作用是将储氧器中的压力维持在大气压或略高于大气压。在一个实施方案中,储氧器的大小被设计成提供至少一次呼吸所需的氧气体积,如0.5升、1升、1.5升或2升。在一个实施方案中,储氧器小于单次呼吸的氧气体积,并且气体调节器以大于呼吸机耗氧速率的速率向储氧器供应氧气。
72.在一个实施方案中,调节器被设计成在接近环境压力下输送气体混合物,因为这是呼吸机设计吸入的压力。通过在环境压力下或略高于环境压力下输送空气,调节器不会在呼吸机上游积聚过多压力(呼吸机过压),或在呼吸机上游产生负压真空(对呼吸机节流,或对呼吸机的空气供应增加过多阻力)。呼吸机期望在其入口处具有低阻力,因为它期望从
开放的环境空气源(如室内空气)中吸入空气。气体调节器内部的储氧器提供了一个容积,该容积能够以低阻力响应呼吸机的入口。
73.图9示出了气体调节器的俯视图,并且图10示出了混合阀的近视图。如图9所示,混合气体通过导管965离开调节器930,以到达外壳外部的连接器967。在一个实施方案中,连接器967是用于气道接口的标准(15mm或22mm)连接器。图9还示出了室内空气入口940、氧气入口942、气体出口944、psol 950、控制器952和储氧器954。图10示出了旋钮934与混合阀948的机械连接。图10还示出了氧气流动路径946。
74.图11中示出了包括基于鼓风机的呼吸机1110和氧气调节器1130的呼吸机系统1100。呼吸机1110包括鼓风机或风扇1166,其从环境入口1118产生压力和气流,以便向呼吸机前面的吸气端口1112提供加压呼吸气体,该吸气端口连接到患者呼吸回路。鼓风机1166在入口1118处产生负压。如图11所示,氧气调节器1130通过将调节器的混合气体出口1144联接至呼吸机的入口1118而连接到呼吸机1110。过滤器1168可以连接在调节器和呼吸机之间。混合气体出口1144相对于呼吸机入口1118密封,例如通过导管之间的摩擦配合或吸入密封。然后,将鼓风机产生的负压施加到调节器的混合气体出口。该负压向上游朝着混合阀1148传递,其中在混合阀处,负压有助于将空气和氧气分别从环境入口1140和储氧器1154吸入混合阀。
75.在一个实施方案中,调节器1130不包括鼓风机、马达、压缩机或向气体供应施加压力的其他部件。调节器通过积聚来自高压o2管线的压力来提供高于大气压的混合气体。调节器也可以依靠呼吸机入口的负压将混合气体从调节器吸入呼吸机中。因此,调节器上不需要电机或鼓风机。
76.图11示出了测量硬壳增压室或壳体1156内部的氧气压力的压力传感器1164,以及从压力传感器1164传递到psol 1150的控制器1152的控制信号。图11还示出了用于混合阀1148的旋钮1134、氧气入口1142、氧气流动路径1146和减压阀1160。
77.图12示出了另一个框图,其示出了连接到气体调节器1230的呼吸机1210。任选地,电缆1269连接呼吸机1210和调节器1230,用于在它们之间传递电力和/或控制信号。任选地,电缆1269从呼吸机向调节器提供电力,以便向psol 1250和相关控制器供电。任选地,电缆1269提供从呼吸机到调节器的信号,例如如果呼吸机发生故障时关闭psol的信号(例如在过高的温度下运行,当连接到纯氧源时可以防止火灾安全风险)。在一个实施方案中,基于呼吸机鼓风机(如鼓风机的电机)的温度超过阈值,关闭psol的控制信号从呼吸机(经由电缆1269)发送到调节器。调节器和呼吸机之间交换的信号可以包括来自呼吸机的测量值(系统/部件状态、治疗值或患者参数),或者呼吸机用来控制通气的任何控制信号。例如,出于自动球形阀控制的目的,可以将fio2测量值从呼吸机发送到气体调节器。在另一个实施方案中,可以将到呼吸机内的鼓风机的控制信号发送到气体调节器,以便改善气体调节器psol的响应时间(例如,基于鼓风机速度的增加来控制气体调节器psol以增加氧气供应,反之亦然)。图12还示出了外壳或壳体1232、旋钮1234、室内空气入口1240、氧气入口1242、混合阀1248、控制器1252、储氧器或增压室1254以及减压阀1260。
78.图13是根据一个实施方案的一种配置具有环境气体入口的医疗呼吸机的方法1300。该方法包括:(1301)提供气体调节器;以及(1302)将压缩氧气源流体联接至气体调节器。气体调节器可以具有氧气入口、室内空气入口、混合阀和混合气体出口,并且压缩氧气
源联接至氧气入口。该方法包括:(1303)将气体调节器的混合气体出口流体联接至医疗呼吸机的环境气体入口;以及(1304)操作气体调节器以形成混合气体。这可以通过设置或调节混合阀以将压缩氧气与来自室内空气入口的空气以第一比例混合来实现。该方法还包括:(1305)将混合气体提供给医疗呼吸机的环境气体入口。
79.在一个实施方案中,该方法1300还包括:在气体调节器内部将压缩氧气的压力从第一压力调节,并以不同于(如低于)第一压力的第二压力提供混合气体;随后,将呼吸机内的混合气体的压力调节至不同于(如高于)第二压力的第三压力;以及将加压混合气体提供给呼吸机的吸气端口,用于输送给患者。进入气体调节器的室内空气可以是加压空气,例如如果在气体调节器的上游设置了增压室。这可以用于室内环境脏污且担心空气供应污染的环境中,因此室内空气在气体调节器上游通过过滤和加压步骤。
80.图14示出了根据一个实施方案的一种用于调节基于鼓风机的医疗呼吸机的呼吸气体的方法1400。方法1400包括:(1401)以第一比率混合室内空气和氧气以形成第一呼吸气体。第一呼吸气体穿过基于鼓风机的呼吸机上游的气体流动路径。该方法还包括:(1402)将第一呼吸气体引入基于鼓风机的医疗呼吸机的入口;以及(1403)对在基于鼓风机的医疗呼吸机内部的第一呼吸气体进行加压。该方法还包括:(1404)向基于鼓风机的医疗呼吸机的吸气端口提供加压的第一呼吸气体。该方法包括:(1405)将第一比率调节至不同于第一比率的第二比率。这是在上游完成的,并与基于鼓风机的呼吸机分开。调节可由用户手动完成(如通过调节控制旋钮)或由数字控制器自动完成(如将测量的fio2与目标fio2进行比较并控制致动器(如调节球形阀以实现目标fio2浓度的电机)的控制电路)。该方法还包括:(1406)以第二比率混合室内空气和氧气以形成第二呼吸气体;以及(1407)将第二呼吸气体引入基于鼓风机的医疗呼吸机的入口。呼吸气体引入呼吸机的入口是通过将气体调节器的出口连接到呼吸机的入口来实现的。
81.本文所述的呼吸机系统的实施方案使得呼吸气体能够在医疗呼吸机的上游和外部混合。气体调节器在呼吸机外部和独立于呼吸机将空气和氧气混合至期望的比例。气体混合对呼吸机是不可见的,呼吸机通过其环境入口吸入空气,就像没有气体调节器一样。呼吸机被设计成从呼吸机运行的环境中吸入环境空气,并且气体调节器改变该环境空气,而无需将呼吸机移动到不同的环境中。气体混合(由气体调节器提供)与通气(由呼吸机提供)分离。这种设计使两个装置能够独立操作。此外,气体调节器可以附接到现有的呼吸机(如已经在临床环境中使用的呼吸机),而无需对那些现有的呼吸机进行改进。
82.气体调节器可以被描述为气体混合器、混合系统或累积器。气体调节器可以描述为气体混合器、混合系统或蓄压器。它在呼吸机的上游以期望的浓度或比率提供混合空气的储存器或缓冲器,该储存器或缓冲器可用于呼吸机向患者输送呼吸。上文的描述描述了混合氧气和室内空气,但是也可以混合其他气体(如氦氧混合气(由氦(he)和氧气(o2)的混合物组成的呼吸气体)或氮氧混合气(具有氮气的呼吸气体,如68%的氮气(n)和32%的氧气(o2))。这些不同的气体具有不同的密度,因此可以为每种气体提供不同的调节器;也就是说,一个专门用于与浓氧气混合的空气的调节器、第二个单独的用于与氦氧混合气混合的空气的调节器等用于其它气体混合物。
83.在一个实施方案中,气体调节器有效地改变了供给呼吸机的室内空气中的氧含量。环境空气通常为约21%fio2。通过将室内空气和浓缩氧气混合,气体调节器可以将这一
数量提高至100%fio2。在一个实施方案中,气体调节器的混合阀在21%fio2(至多100%fio2)的范围内操作。例如,当阀在一个方向上(如顺时针)转动时,其使阀和氧气入口之间的开口变宽,以允许更浓的氧气流入阀中,而当在另一个方向上(如逆时针)转动时,其使开口变窄,以减少流入阀中的氧气量。因此,转动阀门改变了从调节器出来的混合空气的fio2。
84.在一个实施方案中,气体调节器可以连接到任何呼吸机的空气入口,该呼吸机使用大气(环境空气或室内空气)并且能够输送空气与高压氧的混合物(呼吸机适用于高压氧)。在一个实施方案中,气体调节器与适用于高压o2的基于鼓风机的呼吸机一起使用。在一个实施方案中,该呼吸机被设定为提供高达100%fio2的加压氧气。气体调节器提供非常低的压力(高于当地大气压力)(或相对于当地大气压力为零的压力)混合物,并且呼吸机从该混合物中而不是从外部环境空气中吸取空气。浓缩氧气源连接到气体调节器(而不是呼吸机),并且因此氧气被包含在流入呼吸机入口(鼓风机上游)的空气中,而不是在鼓风机下游将浓缩氧气添加到呼吸机内部的气流中。
85.在一个实施方案中,提供气体调节器作为升级套件,以使呼吸机能够升级到更宽的fio2范围。因为气体调节器与呼吸机分离,所以可以在现场将调节器连接到呼吸机(如通过将气体调节器的出口连接器连接到呼吸机的室内空气入口,并且任选地,包括将气体调节器安装到呼吸机作为基座)。
86.可以使用软件、硬件或软件和硬件的组合来采用本文描述的实施方案,以实现和执行本文公开的系统和方法。尽管在整个本公开中已经叙述了执行特定功能的特定装置,但是本领域技术人员将会理解,这些装置是为了说明的目的而提供的,并且在不脱离本公开的范围的情况下,可以采用其他装置来执行本文公开的功能。此外,上文参考根据本公开的方面的系统和方法的框图和/或操作图示描述了本公开的一些方面。方框中标注的功能、操作和/或动作可以不按照任何相应流程图中所示的顺序发生。例如,取决于所涉及的功能和实施方式,连续示出的两个方框实际上可以基本上同时或以相反的顺序执行。
87.本公开参考附图描述了本技术的一些实施方案,其中仅示出了一些可能的实施方案。然而,其他方面可以以许多不同的形式来体现,并且不应该被解释为限于本文阐述的实施方案。而是,提供这些实施方案,使得本公开将详尽和完整,并将可能的实施方案的范围充分地传达给本领域技术人员。此外,如本文和权利要求中所使用的,短语“元素a、元素b或元素c中的至少一个”旨在表达以下任何一个:元素a、元素b、元素c、元素a和元素b、元素a和元素c、元素b和元素c以及元素a、元素b和元素c中的任何一个。此外,本领域技术人员将理解术语如“约”或“基本上”根据本文使用的测量技术表达的程度。在本领域技术人员可能不清楚地定义或理解此类术语的程度上,术语“约”应意指
±
10%。
88.尽管本文描述了具体实施方案,但是本技术的范围不限于那些具体实施方案。此外,尽管可以分别描述不同的示例和实施方案,但是在实现本文描述的技术时,这些实施方案和示例可以彼此组合。本领域技术人员将认识到在本技术的范围和精神内的其他实施方案或改进。因此,仅作为说明性实施方案公开了特定结构、动作或介质。本技术的范围由下文权利要求书和其中的任何等效物来定义。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。