技术特征:
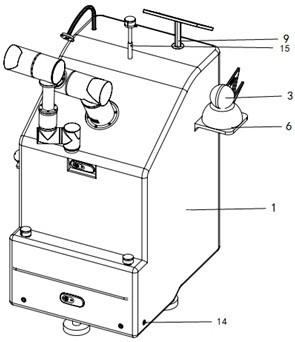
1.一种用于诊疗和心肺复苏的多功能机器人,其特征在于,包括机体、探头支架、遥操作手柄和机械臂,所述探头支架设置在机体侧面,用于放置多种可更换探头,机体上与探头支架相对的一侧设置有遥操作手柄,遥操作手柄通过手柄支架固定在机体上;所述机械臂设置在机体前端,机械臂的末端设置有探头更换装置,所述探头更换装置与多种可更换探头相适配。2.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机体的顶部设置有交互显示器,所述交互显示器通过旋转底座固定在机体上;所述旋转底座包括支撑杆和安装杆,所述安装杆的一端与所述支撑杆相连,另一端与所述交互显示器相连。3.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机体顶部还设置有手动更换装置,所述手动更换装置通过伸缩软管与机体连接。4.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机械臂的末端内置有六维力传感器。5.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机体上设置有多个激光雷达和多个超声波雷达,所述激光雷达设有3个,分别位于机体顶部与机体前端,位于机体顶部的激光雷达通过伸缩支架与机体连接,所述超声波雷达设有4个,分别位于机体两侧与机体前端;还设置有多个摄像头,所述摄像头设有2个,在机体前端呈上下排布。6.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述多种可更换探头分别为仿手掌按压触头、红外热成像仪、人体三维扫描仪和超声波探头。7.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机体底部设置有底盘,所述底盘上对称设有四个万向轮,所述万向轮通过万向轮连接架与机体相连,位于机体前端的两个万向轮大于位于机体后端的两个万向轮,位于机体前端的两个万向轮与轮毂电机相连;所述底盘上还对称设置有多个t型固定脚架,所述t型固定脚架为可伸缩设置。8.如权利要求1所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,所述机器人能在超声诊疗模式与心肺复苏模式之间切换。9.如权利要求8所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,当切换为超声诊疗模式时,工作方法为:将机器人置于病床侧,将病人置于平卧位,将机械臂末端更换为超声波探头,通过机械臂末端内置的六维力传感器获取与人体接触时的力反馈信息,操作者根据力反馈信息操控遥操作手柄调整机械臂不同位姿,对患者不同部位的按压深度进行实时调节,通过交互显示器观察患者各部位的超声信息,有效对患者胸外的各部位进行超声检查。10.如权利要求8所述的用于诊疗和心肺复苏的多功能机器人,其特征在于,当切换为心肺复苏模式时,工作方法为:将心肺复苏机器人置于病床头侧,将病人置于平卧位,去枕,解开衣扣,松解腰带;将机械臂末端更换为人体三维扫描仪扫描人体进行人体结构三维重建,对不同人体形体进行心肺复苏按压位置定位和按压深度确定;将机械臂末端更换为仿手掌按压触头,调整按压参数,展开机体底部的t型固定脚架,
通过机械臂末端更换的仿手掌按压触头对患者进行心肺复苏时的胸外按压;将机械臂末端更换为红外线热成像仪对患者的皮肤表面进行热成像采集,用来观察患者的外周灌注情况,指导心肺复苏过程。
技术总结
本发明公开了一种用于诊疗和心肺复苏的多功能机器人,属于诊疗器械技术领域包括机体、探头支架、遥操作手柄和机械臂,所述探头支架设置在机体侧面,用于放置多种可更换探头,机体上与探头支架相对的一侧设置有遥操作手柄,遥操作手柄通过手柄支架固定在机体上;所述机械臂设置在机体前端,机械臂的末端设置有探头更换装置,所述探头更换装置与多种可更换探头相适配。通过在机械臂末端设置探头更换装置,使所述机器人能够根据不同模式更换不同的探头,集成诊疗及心肺复苏等多种功能于一体,可协助医生对患者进行针对性的治疗,提高急诊科室的救治效率。科室的救治效率。科室的救治效率。
技术研发人员:陈玉国 高明 徐峰 庞佼佼 王甲莉 王怀震 韩琪
受保护的技术使用者:山东大学齐鲁医院
技术研发日:2022.09.02
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。