模块化轮装置
1.发明背景
2.本发明涉及一种模块化轮装置(modular wheel arrangement)、以及一种用于操作模块化轮装置从而在环境中移动物体的方法和系统。
3.现有技术描述
4.在本说明书中,对任何在先公开(或者从其中衍生出的信息)或者对任何已知事物的参考,不是且不应当被认为是对在先公开(或者从其中衍生出的信息)或者已知事物形成本说明书涉及的努力的领域中的公知常识的一部分的认可或承认或任何形式的暗示。
5.troy cordie、tirthankar bandyopadhyay、ryan steindl、ross dungavell的“modular field robots for extraterrestrial exploration”描述了一种模块化野外机器人的设计和控制器架构,该机器人可以以各种功能配置快速组装。提供了一种模块化轮设计和分布式控制器架构,其能够创建一系列定制的多轮配置,这些多轮配置能够在模拟故障场景期间在各种地形上穿越。独立的轮式单元具有能量模块、计算通信模块和致动模块,并且在部署期间不需要任何现场的修改或物理定制,从而实现无缝即插即用的行为。分级控制结构运行主体控制器节点,该主体控制器节点分解从更高级别的规划器请求的整个主体运动,以生成每个模块的致动目标序列,而运行在每个模块上的局部控制器节点确保期望的致动适合于配置、负载和地形特征。
6.本发明概述
7.在一个宽泛的形式中,本发明的一个方面寻求提供一种用于在环境中移动物体的系统,其中该系统包括:一个或更多个模块化轮,其被配置为移动物体,其中该一个或更多个模块化轮包括:主体,其被配置为附接到物体;轮;驱动器,其被配置为旋转轮;以及传感器,其被安装到主体;以及一个或更多个处理设备,其被配置为根据来自传感器的信号控制一个或更多个模块化轮,从而旋转轮并移动物体。
8.在一个实施例中,至少一个模块化轮包括被配置为调整轮的定向的转向驱动器,并且其中一个或更多个处理设备被配置为控制转向驱动器,从而改变轮的定向并由此使物体转向。
9.在一个实施例中,该一个或更多个处理设备被配置为:从一个或更多个传感器接收传感器信号;分析传感器信号;生成指示一个或更多个模块化轮的轮配置的轮配置;并且,根据轮配置来控制一个或更多个模块化轮。
10.在一个实施例中,该一个或更多个处理设备被配置成为每个模块化轮生成轮配置。
11.在一个实施例中,轮配置指示以下中的至少一个:一个或更多个模块化轮相对于彼此的位置;一个或更多个模块化轮相对于一个或更多个被动轮(passive wheel)的位置;一个或更多个模块化轮相对于物体的位置;一个或更多个模块化轮相对于环境的位置;一个或更多个模块化轮相对于一个或更多个标记的位置;一个或更多个模块化轮相对于彼此的定向;一个或更多个模块化轮相对于一个或更多个被动轮的定向;一个或更多个模块化轮相对于物体的定向;一个或更多个模块化轮相对于环境的定向;一个或更多个模块化轮
相对于一个或更多个标记的定向;每个模块化轮的轮标识;以及,每个模块化轮的相对位置、相对定向和轮标识。
12.在一个实施例中,一个或更多个标记是以下中的至少一个:设置在物体上;设置在环境中;设置在一个或更多个模块化轮上;一个或更多个模块化轮;一个或更多个被动轮;一个或更多个有源标记(active marker);物体的一部分;基准标记;和april tag。
13.在一个实施例中,传感器是成像设备,其被配置为捕获一个或更多个图像,并且其中一个或更多个处理设备被配置为通过分析一个或更多个图像来生成轮配置。
14.在一个实施例中,一个或更多个处理设备被配置成:分析在至少一个模块化轮处于多个定向时捕获的图像;并且,使用图像生成配置数据。
15.在一个实施例中,一个或更多个处理设备被配置为:在相应模块化轮的定向改变时,监测来自成像设备的图像;并且,确定何时捕获包括标记的图像。
16.在一个实施例中,一个或更多个处理设备被配置为:识别包括标记的图像;确定在捕获所识别的图像时的轮定向;并且,使用轮定向来生成轮配置。
17.在一个实施例中,一个或更多个处理设备被配置为:分析图像以识别至少一个标记参数;并且,使用标记参数生成轮配置。
18.在一个实施例中,标记参数包括以下中的至少一个:标记尺寸;标记形状;标记位置;标记颜色;标记照明序列;标记模式;和标记定向。
19.在一个实施例中,一个或更多个处理设备被配置成:确定何时捕获包括标记的图像;使用标记的图像确定相对于标记的轮位置和定向;并且,使用每个模块化轮的轮位置和定向来生成轮配置。
20.在一个实施例中,一个或更多个处理设备被配置成:确定第一模块化轮的第一成像设备何时捕获第二模块化轮的图像;分析来自第一模块化轮的一个或更多个图像以确定至少一个第二模块化轮的轮标识;并且,至少部分地使用所确定的轮标识生成轮配置。
21.在一个实施例中,一个或更多个处理设备被配置为:引起一个或更多个第二模块化轮的移动;分析来自第一成像设备的多个图像以检测至少一个第二模块化轮的移动;并且,使用分析的结果来确定至少一个第二轮的标识。
22.在一个实施例中,一个或更多个处理设备被配置成使用与至少一个第二模块化轮相关联的视觉标记来确定至少一个第二模块化轮的轮标识。
23.在一个实施例中,传感器是力传感器,其被配置为捕获主体和物体之间的力,并且其中一个或更多个处理设备被配置为通过分析捕获的力来生成轮配置。
24.在一个实施例中,一个或更多个处理设备被配置为:控制一个或更多个模块化轮以使模块化轮执行定义的移动;并且,根据定义的移动分析捕获的力以生成配置数据。
25.在一个实施例中,一个或更多个处理设备被配置为:使第一模块化轮执行定义的移动;并且,使用从第一模块化轮和一个或更多个第二模块化轮的力传感器捕获的力,由此生成轮配置。
26.在一个实施例中,一个或更多个处理设备被配置为:从一个或更多个传感器接收传感器信号;分析传感器信号;从传感器信号中识别指令;并且,根据指令控制一个或更多个模块化轮。
27.在一个实施例中,传感器信号指示设置在环境中的标记。
28.在一个实施例中,传感器包括成像设备,并且其中一个或更多个处理设备被配置成分析由成像设备捕获的图像以检测标记。
29.在一个实施例中,标记包括环境中的线标记,并且一个或更多个处理设备被配置成控制一个或更多个模块化轮来根据线标记移动物体。
30.在一个实施例中,线标记包括编码的线标记,并且一个或更多个处理设备被配置为跟随根据编码的线标记的路线。
31.在一个实施例中,一个或更多个处理设备被配置为:确定物体配置;并且,至少部分地根据物体配置来控制模块化轮。
32.在一个实施例中,物体配置指示以下中的至少一个:物体的物理范围;以及与物体相关联的移动参数。
33.在一个实施例中,传感器是成像设备,其被配置为捕获一个或更多个图像,并且其中一个或更多个处理设备被配置为通过分析一个或更多个图像来确定物体配置。
34.在一个实施例中,一个或更多个处理设备被配置为:确定物体以及附接到物体的至少一个模块化轮中的至少一项的标识;并且,至少部分地使用物体标识来确定物体配置。
35.在一个实施例中,一个或更多个处理设备被配置为:确定指示以下中的至少一个的路由数据(routing data):行进路径;以及目的地;并且根据路由数据和轮配置来控制驱动器和转向驱动器中的至少一个。
36.在一个实施例中,路由数据指示以下中的至少一个:允许的物体行进路径;允许的物体移动;不同物体的允许接近限度;物体的允许区域;以及物体的拒绝区域。
37.在一个实施例中,一个或更多个处理设备被配置为:确定物体以及附接到物体的至少一个模块化轮中的至少一个的标识;并且至少部分地使用物体标识来确定路由数据。
38.在一个实施例中,一个或更多个处理设备被配置成至少部分地使用网络标识符来确定物体标识。
39.在一个实施例中,一个或更多个处理设备被配置成使用机器可读编码数据来确定物体标识。
40.在一个实施例中,机器可读编码数据是视觉数据,传感器是成像设备,并且其中一个或更多个处理设备被配置成分析由成像设备捕获的图像以检测机器可读编码数据。
41.在一个实施例中,机器可读编码数据被编码在标签上,并且其中一个或更多个处理设备被配置成从标签读取器接收指示机器可读编码数据的信号。
42.在一个实施例中,标签是以下中的至少一个:短程无线通信协议标签;rfid标签;以及蓝牙标签。
43.在一个实施例中,该系统包括安装到物体上的一个或更多个被动轮。
44.在一个实施例中,至少一个模块化轮包括被配置为与一个或更多个处理设备无线通信的收发器。
45.在一个实施例中,一个或更多个处理设备包括与一个或更多个模块化轮中的每一个模块化轮相关联的控制器。
46.在一个实施例中,一个或更多个处理设备包括控制处理设备,该控制处理设备被配置为:至少部分地使用所确定的轮配置生成控制指令;以及,将控制指令提供给一个或更多个控制器,一个或更多个控制器响应于控制指令以控制一个或更多个相应驱动器并由此
移动物体。
47.在一个实施例中,一个或更多个处理设备被配置为向每个控制器提供相应的控制指令,从而独立地控制每个模块化轮。
48.在一个实施例中,一个或更多个处理设备被配置为向一个或更多个控制器提供控制指令,并且其中一个或更多个控制器通信以独立地控制每个模块化轮。
49.在一个实施例中,控制指令包括每个轮的轮定向和每个轮的旋转速率中的至少一个。
50.在一个实施例中,控制指令包括物体的行进方向和速率,并且其中控制器使用控制指令来确定每个轮的轮定向和每个轮的旋转速率中的至少一个。
51.在一个实施例中,该系统被配置成通过以下中的至少一个来使物体转向:差动地旋转多个模块化轮;以及,改变一个或更多个模块化轮的定向。
52.在一个实施例中,至少一个模块化轮包括附接到主体的安装件,该安装件被配置成将主体联接到物体。
53.在一个实施例中,一个或更多个模块化轮包括电源,该电源被配置成为以下中的至少一个提供电力:驱动器;控制器;收发器;和转向驱动器。
54.在一个实施例中,该系统包括多个模块化轮。
55.在一个实施例中,该物体包括平台,并且其中至少一个模块化轮附接到平台。
56.在一个实施例中,物体包括由平台支撑的物品。
57.在一个宽泛的形式中,本发明的一个方面寻求提供一种用于在环境中移动物体的方法,其中该方法包括:提供一个或更多个模块化轮,其被配置为移动物体,其中该一个或更多个模块化轮包括:主体,其被配置为附接到物体;轮;驱动器,其被配置为旋转轮;以及传感器,其被安装到主体;以及,在一个或更多个处理设备中,根据来自传感器的信号控制一个或更多个模块化轮,从而旋转轮并移动物体。
58.在一个宽泛的形式中,本发明的一个方面寻求提供一种用于在环境中移动物体的模块化轮,其中该模块化轮包括:主体,其被配置成附接到物体;轮;驱动器,其被配置为旋转轮;以及安装到主体的传感器。
59.应当理解,本发明的宽泛形式及其相应的特征可以结合地使用和/或独立地使用,并且对单独的宽泛形式的提及并不意图是限制性的。此外,应当理解,方法的特征可以使用系统或设备来执行,并且系统或设备的特征可以使用方法来实现。
60.附图简述
61.现在将参考附图来描述本发明的各种示例和实施例,在附图中:
62.图1a是模块化轮的示例的示意性端视图;
63.图1b是图1a的模块化轮的示意性侧视图;
64.图1c是安装到物体的图1a的模块化轮的示意性端视图;
65.图1d是图1c的物体的示意性侧视图;
66.图2是用于在环境中移动物体的控制过程的第一示例的流程图;
67.图3是用于在环境中移动物体的控制过程的第二示例的流程图;
68.图4a是模块化轮的特定示例的示意性端视图;
69.图4b是图4a的模块化轮的示意性侧视图;
70.图5是用于图4a和图4b的模块化轮的轮控制器的示例的示意图;
71.图6a是用于移动物体的轮控制器架构的示例的示意图;
72.图6b是用于移动物体的轮控制器架构的另一示例的示意图;
73.图7a至图7d是不同轮控制配置的示例的示意图;
74.图8a是模块化轮的另一特定示例的第一示意性侧视图;
75.图8b是图8a的模块化轮的示意性前视图;
76.图8c是图8a的模块化轮的第二示意性侧视图;
77.图8d是图8a的模块化轮的示意性前顶侧等距视图;
78.图9是使用标记检测在环境中移动物体的控制过程的示例的流程图;
79.图10是使用轮检测在环境中移动物体的控制过程的示例的流程图;
80.图11是使用力检测在环境中移动物体的控制过程的示例的流程图;
81.图12是使用物体配置在环境中移动物体的控制过程的示例的流程图;以及
82.图13是使用路由信息在环境中移动物体的控制过程的示例的流程图。
83.优选实施例详述
84.现在将参考图1a至图1d描述用于在环境中移动物体的模块化轮的示例。
85.在该示例中,模块化轮150包括被配置为附接到物体的主体151和轮152,轮152通常由主体151使用轴或类似物支撑。诸如马达的驱动器153设置有驱动器153,该驱动器153被配置为旋转轮152,允许模块化轮150在表面上移动。主体151可以是任何适当的形式,并且可以以任何方式——包括通过使用安装支架157或类似物——附接到物体。
86.在一个示例中,安装支架157可选地可旋转地安装到主体151,允许使用转向驱动器155来调节模块化轮的定向(“航向(heading)”),使得模块化轮150可以被转向。然而,将理解,这可能例如在滑移转向布置或类似布置中不是必需的,如下面更详细地描述的。
87.模块化轮还包括安装到主体151的传感器158。传感器用于允许模块化轮被配置和/或控制,并且传感器158的性质、安装位置和使用方式将取决于优选的实施方式而变化。例如,传感器158可以是用于感测轮周围环境中的标记或特征的成像设备,在这种情况下,成像设备通常附接到主体151的外部。然而,可替代地,传感器158可以是力传感器,特别是配置成感测物体和模块化轮之间的力的扭矩传感器,在这种情况下,传感器可以定位在支架157和主体151之间。还将理解,可采用多个传感器,且单称术语的使用可包括多个传感器。
88.在使用中,一个或更多个模块化轮可以附接到物体以允许物体移动,并且现在将参考图1c和图1d来描述这一示例。
89.在该示例中,示出了平台形式的物体160,其中四个模块化轮150安装到平台,允许通过控制四个模块化轮150中的每一个来移动平台。然而,可以设想广泛的不同布置,并且上述示例仅用于说明目的,而不是旨在进行限制。
90.例如,该系统可以使用从动模块化轮(driven modular wheel)和被动轮的组合,其中一个或更多个模块化轮可以用来提供动力,而被动轮用来完全支撑物体,例如允许单个模块化轮与多个被动轮一起部署以支撑和移动物体。转向可以通过使单独的轮转向来实现,如下面将更详细地描述的,和/或通过不同模块化轮的差动旋转来实现,例如使用滑移转向布置或类似布置来实现。
91.在当前的示例中,模块化轮被显示为设置在平台的拐角附近。然而,这不是必要的,模块化轮可以安装在任何位置,只要假设这足以充分支撑平台。
92.虽然当前的示例侧重于平台的使用,但模块化轮可以与广泛的不同物体一起使用。例如,使用带有平台、托盘或其他类似结构的轮,允许一个或更多个物品由平台支撑,并集体移动。因此,可以将轮附接到支撑多个物品的托盘上,允许托盘和物品移动,而不需要使用托盘千斤顶(pallet jack)或类似物。在这种情况下,术语“物体(object)”旨在统称平台/托盘及其上支撑的任何物品。可替代地,轮可以直接附接到物品上,而不需要平台,在这种情况下物品就是物体。
93.可以移动的物体的性质将根据优选的实施方式、预期的使用场景和环境的性质而有所不同。特定的示例环境包括工厂、仓库、存储环境或类似的环境,尽管可以理解,技术可以更广泛地应用,并且可以在室内和/或室外环境中使用。类似地,物体可以是各种各样的物体,并且例如可以包括要在工厂内移动的物品,例如交通工具的部件等。然而,应该理解,这并不是为了限制。
94.每个模块化轮150包括控制器154,该控制器154被配置为控制驱动器153以允许轮152根据需要旋转,并且可选地控制转向驱动器155以允许调整轮152的定向。
95.控制器可以是任何适当的形式,但在一个示例中是执行存储在非易失性(例如,硬盘)存储装置上的软件应用的处理设备,尽管这不是必需的。然而,还应理解,控制器可以是任何电子处理设备,例如微处理器、微芯片处理器、逻辑门配置、可选地与实现逻辑相关联的固件(例如fpga(现场可编程门阵列))、或者任何其他电子设备、系统或装置。
96.在使用中,轮的控制以及因此物体的移动通常由一个或更多个处理设备执行,该处理设备包括与一个或更多个模块化轮150和可选地一个或更多个分离的处理系统的相关联的控制器154,其中处理根据需要而在处理设备之间分布。为了便于说明,以下描述将一般地提及一个或更多个处理设备,其意图是这可以涵盖仅在与一个或更多个模块化轮和/或与一个或更多个处理系统相关联的一个或更多个控制器内执行的处理。因此,对单数的引用应被视为涵盖复数布置并且反之亦然,使得术语“处理设备(processing device)”将被理解为包括具有多个处理设备的布置。
97.在任何情况下,上述布置允许一个或更多个处理设备被配置成根据来自传感器158的信号控制一个或更多个模块化轮150,以旋转和/或转向轮152,并从而移动物体。实施控制的方式将根据优选的实施方式而变化,并且现在将进一步详细描述这方面的示例。
98.现在将参考图2描述控制过程的第一示例,在该第一示例中从环境中识别指令。
99.在该示例中,在步骤200,处理设备从一个或更多个传感器接收传感器信号,并然后在步骤210分析传感器信号。在步骤220,处理设备从传感器信号识别指令,并然后在步骤230根据指令控制一个或更多个模块化轮。因此,在这种情况下,指令通常使用诸如编码数据或类似的机器可读标记来在环境中被编码,允许这些被检测并用于控制物体的移动。
100.执行此操作的确切方式将取决于指令是如何编码和感测的。例如,在最基本的级别,这种方法可以包括线跟随,使用在表面上标记的可见和/或不可见的线在环境中编码行进路径形式的路线。因此,在一个示例中,传感器158是成像设备,并且处理设备被配置成分析由成像设备158捕获的图像以检测标记,允许这些标记被解译并用于引导物体的移动。该布置在与被动轮一起使用的单个模块化轮的背景下特别有用,以便允许使用线跟随过程来
移动物体,尽管应当理解,这也可以与包括多个模块化轮的布置一起使用。
101.除了基本的线标记之外,还可以使用编码线系统,例如,使用彩色线或有选择的折线,从而允许执行更复杂的路由。这可以包括使处理设备设置有路由信息,该路由信息定义了应该跟随的彩色线的序列。例如,可以定义包括不同颜色出口路径的连接点(junction),其中处理设备分析捕获的图像以检测不同颜色的线,使用路由信息确定要跟随哪条线。这允许使用不同的颜色序列来定义环境中的不同路线,同时使用一组通用的标记。
102.然而,还将认识到,可以使用其他技术。例如,可以对不可见的线进行磁编码,或者可以使用诸如箭头的可见代码来定义路由信息。可替代地,诸如rfid标签之类的标签可以设置在环境中,并用导航信息编码,该导航信息可以被一个或更多个模块化轮感测并用于控制物体的移动。
103.在这些场景中的每一种场景下,特别是在线跟随中,模块化轮中的一个轮可以被指定为主轮,该主轮跟随线,其他轮跟随主导轮。然而,这并不是必要的,并且可以使用任何适当的方法。
104.在任何情况下,应当理解,将传感器集成到模块化轮中可以允许一个或更多个模块化轮附接到物体,从而允许物体根据在环境中编码的指令移动。
105.现在将参考图3描述第二示例控制过程。
106.在本示例中,传感器信号用于生成轮配置,该轮配置然后用于控制模块化轮。
107.在该示例中,处理设备被配置为在步骤300从一个或更多个传感器接收传感器信号,并在步骤310分析传感器信号。在步骤320,分析的结果用于生成指示一个或更多个模块化轮的轮配置的轮配置,在步骤330,轮配置用于随后控制轮的操作。
108.因此,在这种情况下,处理设备被配置为使用传感器信号来确定轮配置,诸如轮的布局,并允许使用该信息来控制轮。因此,识别轮的相对定位和/或定向允许处理设备评估每个轮所需的定向和旋转量,以便使物体以期望的方式移动。
109.一旦得出了该信息,物体的路线可以被转换为每个单独模块化轮的控制输入,从而允许跟随路线。
110.因此,以这种方式检测轮配置的能力允许模块化轮通过使用传感器感测信息而相对于彼此定位,这又允许模块化轮在任何位置附接到物体,而不需要手动定位和/或配置。这反过来允许系统控制轮,以允许物体跟随所需的路径,同时简化设置过程。
111.应当理解,虽然上述过程是独立描述的,但这并不是必要的,并且这两种方法可以结合使用,例如使用第二种方法来确定轮配置,然后使用该轮配置来在使用第一种方法或类似方法进行线跟随时控制轮。
112.现在将描述多个另外的特征。
113.轮配置可以以多种方式定义轮位置和/或布局,并且可以指示以下中的一个或更多个:一个或更多个模块化轮相对于彼此的位置、一个或更多个模块化轮相对于一个或更多个被动轮的位置、一个或更多个模块化轮相对于物体的位置、一个或更多个模块化轮相对于环境的位置、或一个或更多个模块化轮相对于一个或更多个标记的位置。类似地,轮配置可以指示一个或更多个模块化轮相对于彼此的定向、一个或更多个模块化轮相对于一个或更多个被动轮的定向、一个或更多个模块化轮相对于物体的定向、一个或更多个模块化轮相对于环境的定向、或一个或更多个模块化轮相对于一个或更多个标记的定向。轮配置
也可以指示每个模块化轮的轮标识,尽管可替代地,可以为每个模块化轮确定相应的轮配置。
114.在一个优选示例中,轮配置定义每个模块化轮的相对位置、相对定向和轮标识。这允许向每个模块化轮提供指令,以允许轮相对于彼此定位和移动,以便实现所需的物体的总体移动。
115.在一个示例中,系统为每个模块化轮生成轮配置,尽管这不是必需的,并且可替代地,可以为附接到物体的所有模块化轮确定单个轮配置。
116.在使用标记来定义轮配置的情况下,可以在物体上、环境中或一个或更多个模块化轮上设置标记。标记可以是任何适当的形式,并且在一个示例中,可以包括物体上或环境中的唯一特征,该唯一特征可用于识别轮的相对位置和定向。例如,标记可包括机器可读的编码数据,该数据可用于赋予附加信息,并从而协助定位轮。在一个示例中,标记包括诸如一个或更多个基准标记的可见编码数据,其允许轮相对于标记定位自身。在一个特定示例中,机器可读编码数据包括apriltag,其在由edwin olson在2011年于ieee international conference on robotics and automation(icra)会议记录中发表的“apriltag:a robust and flexible visual fiducial system”描述。然而,这不是必要的,并且可以使用允许定位的其他标记。
117.上面的示例描述了无源标记,但是将理解,可以使用诸如照明源、led等的有源标记,其可以基于发射的视觉辐射来检测。在基本示例中,led可用于协助标记的检测,但应理解,这些也可用于编码信息,例如使用不同的颜色、照明序列等。另外和/或可替代地,标记可以是显示器的形式,诸如lcd、led或eink显示器,其可以显示视觉标记,包括但不限于apriltag或基准标记。
118.无论如何,在这些示例中,传感器是被配置为捕获一个或更多个图像的成像设备,其中处理设备被配置为通过分析一个或更多个图像来生成轮配置。具体地,处理设备分析图像以检测标记,并然后使用关于每个模块化轮相对于标记的位置的信息来确定模块化轮的相对位置。
119.由于标记在环境中的位置和模块化轮的初始位置最初是未知的,所以在一个示例中,该过程包括分析在至少一个模块化轮处于多个定向时捕获的图像,然后使用这些图像来生成配置数据。具体地,可以分析不同的图像以便检测标记。在一个特定的示例中,该过程是通过逐渐调整模块化轮的定向、随着轮移动来捕获和分析图像来执行的,该过程继续进行直到检测到标记为止。
120.当在图像中的一个图像中识别到标记时,处理设备可以被配置成在捕获图像时确定轮定向,并然后使用轮定向来生成轮配置。在这方面,如果使用不同模块化轮上的传感器来捕获相同标记的图像,则可以使用每个模块化轮的定向来帮助识别轮的相对位置。
121.然而,应当理解,捕获相对于一个标记的轮定向将只提供有限的信息,并且特别地,将不足以唯一地定位每个模块化轮。因此,在一个示例中,通过捕获附加信息进一步辅助该过程。
122.在一个示例中,这可以通过检测在环境中的不同位置的不同的标记,然后使用该信息来对轮的位置三角测量来实现。另外和/或可替代地,处理设备可以被配置为分析图像以识别至少一个标记参数,诸如标记的尺寸、形状、位置、颜色、照明顺序、模式或定向,并然
后使用该参数来生成轮配置。因此,例如,可以使用从不同模块化轮捕获的标记的相对大小来计算轮与标记的相对距离。类似地,可以使用捕获的apriltag或基准标记的图像来确定关于标记相对于轮的定向的附加信息,这可以进一步帮助精确地解析轮的相对位置。
123.可以使用诸如led的标记,其中颜色和/或照明序列(诸如闪光模式)被用于编码信息,例如用于识别目的。因此,例如,不同的轮可以包括安装在其上的led,其具有不同的颜色和/或以不同的闪光序列进行照明,从而允许区分不同的轮。led可以设置在轮上的不同的位置处,用不同的颜色来识别轮的不同定向。另外,和/或可替代地,可以提供不同led的布局,具有允许识别不同led的颜色和/或照明序列,从而解析布局的总体定向。
124.因此,应当理解,捕获标记的图像,特别是捕获以编码数据的形式的标记的图像,可用于轮相对于彼此的定位,并由此生成配置数据。
125.在另一示例中,标记可以包括其他模块化轮。在这种情况下,模块化轮可以适于逐渐旋转,直到另一个模块化轮成像,重复这样做,使得每个模块化轮成像其他模块化轮,然后使用相对轮定向来解析轮配置。
126.作为该过程的一部分,通常需要识别其他轮中的每一个轮,使得轮标识可以用于生成轮配置,特别是确保正确地解析轮布局。在一个示例中,这是通过使第一模块化轮的第一成像设备捕获第二模块化轮的图像来实现的。然后,处理设备可以引起一个或更多个第二模块化轮的移动,例如,使一个或更多个其他模块化轮依次重新定向,处理设备分析来自第一成像设备的多个图像以检测至少一个第二模块化轮的移动,并由此确定至少一个第二轮的标识。可替代地,可以指示其他模块化轮中的每一个轮转动不同的量,使用由第一成像设备捕获的图像来测量所检测的第二模块化轮的轮移动程度,并由此识别第二模块化轮。
127.另外和/或可替代地,处理设备可以被配置成使用与至少一个第二模块化轮相关联的视觉标记来确定至少一个第二模块化轮的轮标识。例如,模块化轮可以包括唯一标识符,诸如qr码、apriltag等,从而可以使用标识符来确定不同模块化轮的标识。可替代地,可以使用其他技术,诸如提供一系列不同颜色的模块化轮,其中物体装配有不同颜色的轮,从而可以基于轮颜色唯一地标识每个轮。
128.应当理解,在上述示例中,特别是当检测其他模块化轮时,可能需要应用距离阈值以排除环境中存在的其他物体上的轮。
129.此外,尽管上述过程集中于检测其他模块化轮,但还应当理解,也可以检测被动轮。在这种情况下,根据模块化轮和被动轮的相对数量,这可能需要被动轮包括附加的标记,诸如apriltag或类似的标记,以允许完全解析被动轮和模块化轮的相对位置。
130.在另一示例中,与使用视觉感测相反,传感器可以是力传感器,其被配置成捕获主体和物体之间的力,例如由于模块化轮向主体施加力和/或主体向模块化轮施加力而生成的扭矩。在该示例中,处理设备可以被配置为通过分析在一系列条件下生成的力来生成轮配置。这可以通过使处理设备控制一个或更多个模块化轮以使模块化轮执行定义的移动来实现,其中根据定义的移动来分析作为移动结果生成的力以生成配置数据。例如,如果第一模块化轮被控制以执行定义的移动,诸如在给定方向上移动物体的定义旋转,而其余的轮是静止的,这将导致在每个模块化轮中生成不同的扭矩,这取决于轮布局。使用力传感器捕获这些力,并对不同轮的多个不同移动重复这样做,然后允许模块化轮的相对位置被解析。
131.因此,在一个示例中,处理设备被配置为使模块化轮经历一系列定义的移动,其中
所得到的测量力被解析以允许得到相对轮位置并由此得出轮配置。
132.因此,已经描述了允许确定相对轮位置的许多不同机制。虽然这些方法可以独立使用,但这不是必要的,并且可替代地,这些方法可以结合使用。例如,标记的检测可用于定义初始粗略的轮配置,而力的检测可用于进一步细化配置。在一个示例中,这允许使用轮配置的初始粗略评估来允许移动物体,随着物体在使用中被移动而捕获附加的力测量,从而随着时间的推移进一步改善轮配置。
133.除了确定轮配置之外,处理设备还可以要求关于物体的信息以便安全地移动物体。例如,如果物体悬垂在一个或更多个轮上,则可能需要此信息以便在环境中导航。因此,在一个示例中,处理设备被配置成确定物体配置,并然后至少部分地根据物体配置来控制模块化轮。物体配置可以指示能够影响物体移动的任何东西,并且可以包括诸如尺寸、形状、高度等的物体范围、以及诸如物体重量、稳定性等影响物体移动的参数。这允许处理设备在控制轮时考虑到这些因素,从而确保物体不会影响到环境的其他物体或部分,确保不会倾覆或类似的情况。
134.物体配置可以以任何适当的方式确定,并且可以由操作者手动输入,或者例如使用传感器自动确定。例如,当传感器是成像设备时,处理设备可以被配置为通过分析一个或更多个图像来确定物体配置,以便可以通过使传感器对物体的边缘或附接到其上的标记等成像来检测物体范围。类似地,在传感器是力传感器的情况下,这些传感器可用于建立物体的重量和/或质心。
135.另外和/或可替代地,处理设备可以被配置为确定物体的标识和/或附接到物体的模块化轮的标识,并然后基于标识确定物体配置,例如通过使用物体标识检索先前存储的物体配置。物体标识可以通过多种方式中的任何一种来确定,这取决于优选的实施方式。例如,处理设备可以被配置为使用机器可读的编码数据来确定标识。这可以包括设置在物体和/或轮上的视觉编码数据,诸如条形码、qr码或更通常的apriltag,然后可以通过分析图像来检测这些编码数据,以识别图像中的视觉机器可读编码数据,从而允许处理设备对其进行解码。在另一示例中,物体和/或模块化轮可以与标签相关联,诸如短程无线通信协议标签、rfid(射频识别)标签、蓝牙标签或类似标签,在这种情况下,可以从合适的标签读取器检索机器可读编码数据。
136.为了控制物体的移动,处理设备可以被配置为确定指示行进路径和/或目的地的路由数据,并然后根据路由数据生成控制指令。路由数据可以以任何适当的方式确定,并且可以由操作者手动定义,或者使用物体和/或轮标识从诸如数据库的数据储存器(store)中检索。在后一种情况下,可以以与上述类似的方式确定标识。
137.除了指示行进路径和/或目的地之外,路由数据还可以指示允许的物体行进路径、允许的物体移动、不同物体的允许接近限度、物体的允许区域或物体的拒绝区域。在不能跟随优选路径的情况下,可以使用该附加信息,从而允许计算替代路线,例如以避免诸如其他物体的障碍物。
138.确定了路由数据之后,这然后通常使用轮和/或物体配置来处理,从而允许处理系统确定为了使物体穿越路径所需的轮定向和旋转。
139.在一个示例中,该系统包括安装到物体上的一个或更多个被动轮。这种被动轮可以是多向轮,诸如脚轮(castor wheel)或类似轮,在这种情况下,控制器可以被配置成通过
两个或更多个模块化轮的差动旋转来使物体转向。另外和/或可替代地,如上所述,模块化轮可以包括配置成调整轮定向的转向驱动器,在这种情况下,控制器可以配置成控制转向驱动器,从而改变轮定向,并因此直接移动可移动物体。还将理解,可以使用其他配置,诸如设置驱动轮和分离的转向轮。然而,总体上,在单个模块化轮中设置转向和驱动提供了更大范围的灵活性,允许相同的模块化轮以一系列不同的方式使用。这也可以帮助解决轮故障,例如,如果一个或更多个模块化轮故障,允许使用不同的控制模式。
140.在一个示例中,每个模块化轮通常包括被配置为与一个或更多个处理设备无线通信的收发器。这允许模块化轮彼此和/或与其他处理设备直接通信,尽管应当理解这不是必需的,并且可以使用其他布置,例如使用集中式通信模块、多个模块化轮之间的网状网络等。
141.每个模块化轮通常包括诸如电池的电源,其被配置为向驱动器、控制器、收发器、转向驱动器和任何其他部件供电。为每个轮提供电池,允许每个轮是独立的,这意味着轮只需要适配到物体,而不需要单独地连接到电源或其他轮上,尽管应当理解可以使用单独的电源,这取决于预期的使用场景。
142.在一个示例中,该系统包括多个模块化轮,并且中央处理设备被配置为向每个控制器提供相应的控制指令,从而独立地控制每个模块化轮。例如,这可以包括使处理设备生成控制指令,该控制指令包括每个单独的模块化轮的轮定向和/或旋转速率。
143.在另一示例中,处理设备被配置为向控制器提供控制指令,并且其中不同模块化轮的控制器通信以独立地控制每个模块化轮。例如,处理设备可以生成包括物体的行进方向和速率的控制指令,其中每个模块化轮的控制器附接到该物体,然后协作地确定每个轮的轮定向和/或旋转速率。在另一示例中,可以使用主从布置,其允许主模块化轮计算每个单独模块化轮的移动,并根据需要将该信息传递到其他模块化轮控制器。
144.在一个示例中,处理设备被配置为确定一个或更多个模块化轮或物体的标识,然后根据标识生成控制指令。例如,这可用于确保控制指令传输到正确的模块化轮。这也可用于允许处理设备检索物体或轮配置,允许根据需要基于物体和/或轮标识来存储和检索这种配置。
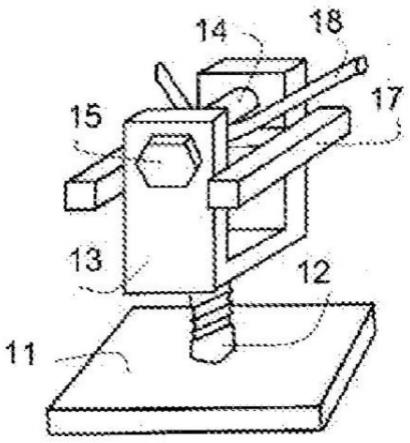
145.现在将参照图4a和图4b更详细地描述模块化轮的第一特定示例。
146.在该示例中,模块化轮450包括具有安装件457的主体451,安装件457被配置为附接到物体。主体具有“7”形,具有支撑安装件457的上侧部451.1和向内倾斜的对角线腿部451.2,该腿部向下延伸到支撑轮452的轮毂451.3。驱动器453附接到轮毂,允许轮旋转。电池456安装在倾斜的对角线腿部451.2的下侧上,其中控制器454安装在电池的外表面上。还提供转向驱动器455,其允许主体451相对于安装件457旋转,从而允许调整轮的定向(取向)。传感器458也被示出附接到主体的上侧部451.1。
147.在一个特定的示例中,模块化轮被设计成独立的两自由度的轮。每个模块化轮可以通过使用位于轮后面和模块顶部处的联接下面的连续旋转伺服系统(servo)来生成速度和航向。它们的旋转中心对齐,以减少旋转时的扭矩。轮和顶部联接使用iso 9409-1404m6螺栓模式,以实现跨平台的可比性。可以使用一组通用的适配器来实现快速的系统组装和重新配置。
148.控制器454可以是任何适当的形式,图5中示出了示例。
149.在该示例中,如图所示,控制器454包括至少一个处理设备571、存储器572、无线收发器573和接口574,它们经由总线575互连。在该示例中,接口574可用于将控制器454连接到驱动器453、转向驱动器455和传感器458。在使用中,处理设备571执行存储在存储器572中的应用软件形式的指令,以允许执行所需的控制过程,并且具体地允许接收传感器信号和可选地处理传感器信号,以及控制驱动器453和转向驱动器455。应用软件可以包括一个或更多个软件模块,并且可以在合适的执行环境例如操作系统环境等中执行。
150.将从此处理解,控制器可以是任何电子处理设备,例如微处理器、微芯片处理器、逻辑门配置、可选地与实现逻辑相关联的固件(例如fpga(现场可编程门阵列))、或者任何其他电子设备、系统或装置。
151.无线收发器573允许与其他模块化轮和/或其他处理系统的控制器454的向前无线连接,从而允许协调多个模块化轮的操作。就这一点而言,通过使控制器454彼此通信,可以实现多个模块化轮的协调,如图6a所示。
152.可替代地,如图6b所示,每个控制器可以与协调控制器454的操作的处理系统680通信。在该示例中,处理系统680可被配置为从每个模块化轮的传感器458接收传感器信号,处理这些信号并生成控制指令以使控制器454控制每个模块化轮450的驱动器453和转向驱动器455。
153.在该示例中,如图所示,处理系统680包括至少一个微处理器681、存储器682、可选输入/输出设备683(诸如键盘和/或显示器)、以及外部接口684,它们经由总线685互连。在该示例中,外部接口684可用于将处理系统680连接到控制器454,但也可选地用于将处理系统680连接到诸如通信网络等的外围设备。尽管示出了单个外部接口684,但这仅仅是出于示例的目的,并且实际上可以提供使用各种方法(例如以太网、串行、usb、无线等)的多个接口。
154.在使用中,微处理器681执行存储在存储器682中的应用软件形式的指令,以允许执行所需的过程。应用软件可以包括一个或更多个软件模块,并且可以在合适的执行环境例如操作系统环境等中执行。
155.因此,将认识到,处理系统680可以由任何合适的处理系统形成,诸如适当编程的客户端设备、pc、web服务器、网络服务器等。在一个特定示例中,处理系统680是标准处理系统,诸如基于英特尔架构的处理系统,其执行被存储在非易失性(例如,硬盘)存储装置上的软件应用,但是这不是必要的。然而,还将理解,处理系统可以是任何电子处理设备,例如微处理器、微芯片处理器、逻辑门配置、可选地与实现逻辑相关联的固件(例如fpga(现场可编程门阵列))、或者任何其他电子设备、系统或装置。
156.处理系统680可以与正在移动的物体相关联,特别是与该物体共同定位或附接到该物体,和/或可以与该物体远程定位,并使用无线通信(包括经由直接、点对点或通信网络)与控制器454通信。此外,虽然处理系统680被示为单个实体,但将认识到这不是必要的,并且可以使用分布式布置。
157.在一个特定示例中,控制器454为raspberry pi的形式,其提供轮命令以及模块化轮和/或通信网络之间的wi-fi通信。内置在每个轮的主体或腿部的是提供电力的四单体锂聚合物电池(four cell lithium polymer battery)。电池可以通过一个可移除的面板访问。
158.在一个示例中,模块化轮系统的中央控制使用相对速度来设置单独模块化轮的速度,从而设置其旋转速率。每个模块化轮相对于物体中心的姿态(位置和定向)可以用来确定所需的速度,这产生了通过移动相对于轮的中心来创建传统控制系统的能力。模块和中心点的不同组合可以创建阿克曼转向(ackerman steering)、差动驱动和非完整的全方向移动。这样的集中控制可以由控制器454执行,例如通过指定一个控制器作为主控制器而指定其他控制器作为从控制器,使集中内置的控制器可选地集成到模块化轮中的一个轮,和/或集中控制可以由处理系统680执行。
159.示例配置在图7a至图7d中示出。图7a示出了三轮配置,其中瞬时旋转中心(icr)居中置于所有附接的轮之间,产生了非完整的全方向配置。图7b示出了四轮配置,其中icr被置于与后两个轮的驱动轴线在一条线上,以提供阿克曼控制。图7c示出了四轮配置,其中icr置于两组轮之间的线上,产生了差动驱动或滑移转向,而图7d示出了三轮配置,其中icr与驱动轴线在一条线上,以提供三轮车(tricycle)控制。将认识到,也可以采用其他驱动配置,并且所示的驱动配置仅用于说明目的。
160.在图8a至图8d中示出了另一示例模块化轮布置。
161.在该示例中,模块化轮850包括具有安装件857的主体,安装件857被配置为附接到物体。主体具有倒“u”形,具有支撑安装件857的上侧部851.1和分别支撑电池856、以及驱动器853和控制器(未示出)的向下突出的臂851.2、851.3。转向驱动器(未示出)也设置在主体的侧向部分851.1中,其允许主体相对于安装件857旋转,从而允许调整轮的定向(取向)。
162.现在将进一步详细描述用于控制物体移动的过程的示例。
163.现在将参考图9描述涉及标记检测的第一示例。
164.在该示例中,在步骤900,处理设备从附接到物体的每个模块化轮上的成像设备接收图像。在步骤910,处理设备分析图像以试图识别标记,诸如apriltag、基准标记、led或类似物。如果在步骤920没有检测到标记,则处理设备重新定向模块化轮并重复步骤900和步骤910,该过程继续进行直到检测到标记,或者直到完成整个360
°
的旋转。
165.一旦检测到标记,在步骤940,处理设备确定标记参数,诸如标记的尺寸或形状、照明序列和/或颜色、或标记在图像中的位置。在步骤950,处理设备分析标记参数,并在步骤960使用这些参数来计算轮相对于标记的位置和/或定向,从而允许在步骤970使用该位置和/或定向来生成轮配置。
166.因此,例如,如果标记包括定位在物体上或环境中的apriltag,则处理设备680可以通过分析由每个成像设备捕获的图像来计算每个模块化轮相对于apriltag的位置,在那之前计算每个模块化轮的相对位置。
167.现在将参考图10描述涉及检测其他轮的第二示例。
168.在该示例中,在步骤1000,处理设备从附接到物体的每个模块化轮上的成像设备接收图像。在步骤1010,处理设备分析图像以试图识别另一个轮,该另一个轮可以包括被动轮,但更通常地是另一个模块化轮。这可以使用任何合适的技术——诸如使用图像识别,或通过检测其他轮上的标签或其他编码数据——来实现。如果在步骤1020没有检测到另一个轮,则在步骤1030处理设备重新定向模块化轮并重复步骤1000和步骤1010。这一直持续到检测到另一个轮,或者直到已经完成整个360
°
的旋转。
169.一旦检测到另一个模块化轮,在步骤1040,处理设备操作以从捕获的图像分析其
他轮的移动。就这一点而言,如果所有模块化轮以不同的方式移动,诸如在不同的方向上或以不同的速率改变定向,则在步骤1050分析捕获到的其他轮的图像,以允许识别其他轮。
170.一旦知道了另一个模块化轮的位置和模块化轮的定向,这些就可以用来确定模块化轮的相对位置。对所有模块化轮重复该过程允许确定相对位置,这继而允许在步骤1060生成轮配置。特别地,这通常是通过以下操作来实现的:使用来自每个轮的测量值来计算单独的机器人状态,然后将这些状态与卡尔曼(kalam)/蒙特卡罗(monte carlo)滤波或类似的方法相组合来构建总体轮配置模型。
171.现在将参考图11描述涉及轮上的力的检测的另一示例。
172.在该示例中,在步骤1100,处理设备使一个或更多个模块化轮执行定义的轮移动。就这一点而言,并不要求实际发生移动,而是要求致动模块化轮,从而导致力施加在物体上,在其他轮不静止的情况下这会使该物体移动。
173.在步骤1110,从安装在一个或更多个模块化轮上的扭矩传感器检测扭矩信号,在步骤1120分析扭矩信号以得出候选轮布置。然后,在步骤1130,这些可以与卡尔曼/蒙特卡罗滤波或类似的方法组合,以生成总体轮配置模型。
174.现在将参考图12描述用于确定物体配置的过程示例。
175.在该示例中,在步骤1200,从一个或更多个传感器接收传感器信号,在步骤1210分析这些传感器信号,并在步骤1220用于确定物体配置。这可以包括例如基于对物体边缘的图像执行的边缘检测检查物体的物理范围,或者可以包括从呈现在物体上的编码数据确定物体标识,并使用该物体标识从远程数据库或类似物中检索先前存储的物体配置。在步骤1230,使用物体配置来控制轮,例如,计算每个模块化轮的控制指令,以便移动物体,同时确保物体不会无意中撞击周围环境或类似情况。
176.现在将参考图13进一步详细描述控制物体的过程示例。
177.在该示例中,在步骤1300,例如通过以类似于上述的方式检测编码数据来确定轮和/或物体标识。随后,在步骤1310,使用物体和/或轮标识来检索与物体相关联的路由数据,以及在步骤1320检索轮和/或物体配置。路由数据可以是通过环境的预定义路线,或者可以包括目标目的地,其中处理设备运行以计算路线。
178.随后,在步骤1330,处理设备可以根据路由数据以及轮和/或物体配置来生成控制指令。例如,轮配置可用于基于轮布局将路线转换为每个模块化轮的特定旋转和/或定向命令,从而确保为每个模块化轮生成的指令反映为了使物体穿越路线所需的移动。
179.在此之后,在步骤1340,控制指令可以被传递到控制器454,允许通过控制轮来根据路由数据移动物体,并从而跟随路线。
180.将认识到,该过程可以周期性地重复,诸如每隔几秒钟重复一次,允许处理设备基本上连续地监测物体的移动,以确保跟随路线,并在需要时采取干预措施,例如校正相对预期行进路径的任何偏差。这也降低了在控制过程的每个循环上需要生成的控制指令的复杂性,允许将复杂的移动以一系列简单的控制指令来实现。
181.因此,将认识到,上述系统提供了模块化轮,其可以附接到物体以允许物体在环境中移动。模块化轮包括传感器,该传感器可以用于感测环境内的标记以控制物体的移动,或者用于感测标记或轮,该标记或轮可以用于生成轮配置,轮配置又可以用于生成移动轮所需的命令,从而根据路由信息移动物体。
182.贯穿本说明书和所附的权利要求,除非上下文另有要求,否则词语“包括(comprise)”及变体例如“包括(comprises)”或“包括(comprising)”将被理解为意指包括所陈述的整数或者整数或步骤的组,但不排除任何其它整数或者整数的组。如本文所用,除非另有说明,否则术语“大约”是指
±
20%。
183.本领域技术人员将认识到,多种变体和修改将变得明显。对本领域技术人员变得明显的所有的这些变体和修改应该被认为落在本发明的前面所描述的广泛的出现的精神和范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。