技术特征:
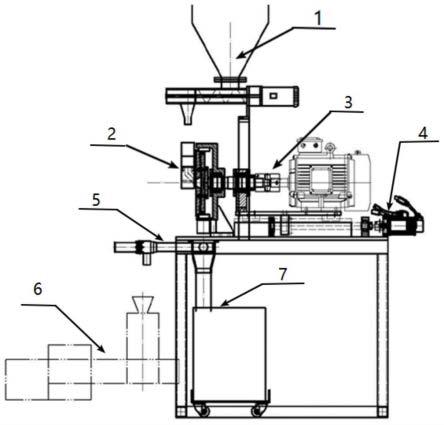
1.一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,包括以下步骤:步骤1,采集盘磨系统运行过程中的磨盘间隙和喂料量的控制量数据,以及粉体粒度pdf形状数据;步骤2、采用高斯型径向基函数神经网络rbf-nn,对粉体粒度pdf形状所对应的权值向量进行解耦计算,从而将粉体粒度pdf表示为一组基函数和所对应权值的乘积;步骤3、采用迭代学习的方法选择一组最优的高斯基函数,使得其对于粉体粒度pdf形状的逼近误差最小;步骤4、采用子空间辨识,建立权值的线性动态模型;步骤5、利用步骤4建立的权值的线性动态模型,结合步骤2、步骤3中所述rbf-nn对粉体粒度pdf形状的近似,得到盘磨系统的随机分布模型,即粉体粒度pdf形状的动态模型。2.根据权利要求1所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,所述步骤2具体包括以下步骤:步骤2.1、将磨盘间隙、喂料量作为系统的输入变量,粉体粒度pdf形状作为系统的输出变量;步骤2.2、采用高斯型径向基函数神经网络rbf-nn逼近所述粉体粒度pdf形状;步骤2.3、对粉体粒度pdf形状所对应的权值向量进行解耦计算。3.根据权利要求2所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,步骤2.2中所述逼近的方法具体是:对于非高斯随机分布的动态系统,将粉体粒度表示为一致有界的随机变量y∈[a,ζ],其中a和ξ表示y的取值范围;令u(k)∈r
m
为控制粉体粒度pdf形状的控制量输入,r
m
表示m维列向量;盘磨过程的粉体粒度pdf形状由其在每个采样时刻k的概率密度函数γ(y,u(k))来表示:p(a≤y<ξ,式中,p(a≤y<ξ,u(k))表示当对盘磨系统施加控制输入u(k)时输出粉体粒度落在区间[a,ξ]内的概率;假设区间[a,b]是预先给定的,其中a、b分别表示随机变量y取值的左右端点,且pdf是连续有界的,则粉体粒度pdf形状用如下的高斯型径向基函数神经网络rbf-nn来逼近:式中,w
l
(u(k))是由控制输入u(k)控制的基函数r
l
(y)的相应权重,l表示高斯型径向基函数神经网络rbf-nn的第l个网络节点,n为网络节点数;在区间[a,b]内定义的基函数r
l
(y)如下:式中,μ
l
和σ
l
分别表示第l个基函数的中心和宽度;则此时所述粉体粒度pdf形状表示为基函数和对应权值的乘积
式中,c(y)为n个基函数组成的行向量,v(k)为对应的权值向量,r
n
(y)和w
n
(u(k))分别表示第n个基函数和对应的权值。4.根据权利要求2所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,步骤2.3中所述解耦计算为,利用矩阵逆运算求解权值向量,如下:v(k)=(c
t
(y)c(y))-1
c
t
(y)γ(y,u(k))。5.根据权利要求1所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,步骤3中所述迭代学习为,在每次迭代中不断的调整rbf-nn基函数的中心和宽度值,最小化粉体粒度实际测量pdf与粉体粒度近似pdf之间的误差,从而选出一组最优的高斯基函数;首先,令m个粉体粒度实际测量pdf的向量形式如下:g(y)=[g1(y),g2(y),...,g
m
(y)]式中,m表示采样点的总数,g
m
(y)表示第m个采样点处的实际测量pdf;假设第i次迭代后获得的粉体粒度近似pdf为:γ
i
(y)=[γ
i,1
(y),γ
i,2
(y),...,γ
i,m
(y)]式中,γ
i,m
(y)表示第i次迭代后第m个采样点处的近似pdf;为了评价粉体粒度pdf形状近似的效果,定义如下性能指标函数:式中,j
i,m
表示第i次迭代后第m个采样点的粉体粒度近似pdf与实际pdf之间的逼近误差;写成向量形式如下:e
i
=[j
i,1
,j
i,2
,...,j
i,m
]
t
式中,j
i,m
表示第i次迭代后第m个采样点的近似pdf与实际pdf之间的逼近误差,e
i
表示第i次迭代后所有采样点的逼近误差构成的误差向量,且e
i
所有分量都是非负的;采用一种基于迭代学习规则的中心和宽度值更新算法来调整基函数参数:式中,μ
l,i
和σ
l,i
分别表示第i次迭代后第l个基函数的中心和宽度值,学习参数α
u
和β
σ
分别定义如下:式中,λ
i
和λ
i
′
是权重系数,ζ
u
和ζ
σ
是学习率。6.根据权利要求1所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,步骤4中所述权值的线性动态模型的构建方法为:不考虑过程和测量噪声,用如下确定性系统的状态空间模型描述权值的线性动态模
型:式中,u
k
∈r
m
、v
k
∈r
l
和x
k
∈r
n
分别表示第k个采样时刻的输入向量、输出向量和状态向量,r
m
、r
l
和r
n
分别表示m维、l维和n维列向量,a,b,c,d为相应维数的系统矩阵。7.根据权利要求1所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,所述步骤4具体包括以下步骤:步骤4.1、确定子空间建模的输入和输出变量;其中所述输入变量为磨盘间隙和喂料量的控制量数据,所述输出数据为粉体粒度pdf形状对应的权值向量数据;步骤4.2、构造hankel数据矩阵:步骤4.2、构造hankel数据矩阵:步骤4.2、构造hankel数据矩阵:步骤4.2、构造hankel数据矩阵:式中,hankel矩阵包含i块行和j块列,即上述矩阵中的每个元素均为列向量;其中,u
k
∈r
m
表示第k个采样时刻的输入向量,v
k
∈r
l
表示第k个采样时刻的输出向量,k的取值范围是[0,2i j-2];步骤4.3、利用斜投影公式计算斜投影o
i
和o
i-1
::式中,w
p
=[u
p v
p
]
t
,w
p
=[u
p v
p
]
t
,矩阵u
p
、u
f-、v
p
和v
f-的定义方式如下:
式中,上标 和-分别表示相应矩阵行块数增加一行和减少一行;步骤4.4、对斜投影o
i
进行奇异值分解,得到广义能观矩阵γ
i
和状态向量序列的估计值同时确定系统的阶次n:式中,u1、u2、s1、s2、v1、v2均为矩阵o
i
分解得到的子矩阵;步骤4.5、对斜投影o
i-1
进行奇异值分解,计算得到γ
i-1
和下一时刻状态向量序列的估计值计值式中,u
a1
、u
a2
、s
a1
、s
a2
、v
a1
、v
a2
均为矩阵o
i-1
分解得到的子矩阵;γ
i-1
表示γ
i
去掉最后l行得到的子矩阵;步骤4.6、通过求解如下最小二乘问题,提取系统矩阵a,b,c,d式中,u
i
=[u
i u
i 1
…
u
i j-1
],v
i
=[v
i v
i 1
…
v
i j-1
]。8.根据权利要求1所述的一种基于迭代学习和子空间辨识的粉体粒度pdf形状建模方法,其特征在于,步骤5中所述粉体粒度pdf形状的动态模型为:
技术总结
本发明提供一种基于迭代学习和子空间辨识的粉体粒度PDF形状建模方法,涉及粉体粒度控制技术领域。步骤如下:1)采集盘磨系统的输入输出数据,包括磨盘间隙、喂料量和粉体粒度PDF形状数据;2)采用RBF-NN对粉体粒度PDF形状对应的权值进行解耦计算;3)采用迭代学习选择一组最优高斯基函数;4)采用子空间辨识建立权值的线性动态模型;5)结合权值线性动态模型和RBF-NN对粉体粒度PDF形状的近似,可得粉体粒度PDF形状的动态模型。本发明采用迭代学习选择高斯基函数,使其对粉体粒度PDF形状的逼近误差最小,极大改善了建模效果;使用子空间辨识建立权值线性动态模型,在保证良好建模精度同时降低模型复杂度,特别符合实际应用时对模型简单易用的要求。型简单易用的要求。型简单易用的要求。
技术研发人员:周平 张理想 李洪澎 李明杰 宋心宇 柴天佑
受保护的技术使用者:东北大学
技术研发日:2022.08.24
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。