1.本发明属于车辆减震领域,具体涉及一种基于双叉臂独立悬架的主控小型电磁式避震器。
背景技术:
2.避震器的作为车辆悬架系统中的重要部件,主要由弹性支撑元件和阻尼元件组成,其作用主要是作为车辆轮系和车身之间的连接并吸收车轮遇到凹凸路面所引起的震动,使乘坐舒适。还可以控制车辆在行驶过程中载荷的转移,帮助车辆在过弯时减少侧倾现象以及减少车辆在急加速和急减速时的俯仰程度以提升车辆的操控稳定性。可主动控制的避震器可以主动改变避震器的相关特性,例如避震器的长度、硬度等特性,从而根据车辆不同工况不同的需求做出调整,进一步提高乘坐舒适性和操控稳定性。
3.双叉臂独立悬架中传统的的避震器不具备主动控制的功能,避震器特性一旦确定,在行车过程中几乎无法调节;目前可主动控制的避震器体积都比较大,重量都比较重,成本都比较高。采用双叉臂独立悬架的线控底盘留给避震器的空间十分有限,市面上绝大多数可主动控制的避震器体积都很大,如果用在采用双叉臂独立悬架的线控底盘上的话,很可能导致避震器与线控底盘的其他部件互相干涉。
技术实现要素:
4.本发明的目的在于提供一种基于双叉臂独立悬架的主控小型电磁式避震器。
5.实现本发明目的的技术解决方案为:一种基于双叉臂独立悬架的主控小型电磁式避震器,避震器装配在双叉臂独立悬架与车身之间,包括动子部分,定子部分,上端盖和气弹簧;所述动子部分与定子部分之间为间隙配合,通过定子部分和上端盖内部凸台结构进行限位;
6.动子部分外周套设若干个环状永磁体,动子部分内部为气弹簧缸体;定子部分内周设有若干三相绕组,气弹簧活塞一端固定在定子部分,另一端在气弹簧缸体内往复运动,气弹簧活塞与气弹簧缸体构成菱形副,气弹簧缸体内部填充有高压气体。
7.进一步的,动子部分包括动子连杆,动子螺纹柱,动子铁芯,永磁体,气弹簧缸体,气弹簧活塞和动子上限位;
8.永磁体套在空心柱状动子铁芯上,动子铁芯两端均固定设有动子螺纹柱,从而对永磁体进行固定;
9.气弹簧缸体一端和动子连杆可拆卸连接,且气弹簧缸体放置在空心柱状动子铁芯内部,一端的动子螺纹柱和动子连杆连接,另一端的动子螺纹柱和动子上限位连接。
10.进一步的,气弹簧缸体一端和动子连杆螺纹连接,动子连杆另一端设有用于与双叉臂独立悬架的下控制臂连接的通孔,通孔内部装有橡胶轴套,通孔两侧分别装有安装垫圈。
11.进一步的,定子部分包括直线轴承,装有霍尔传感器的pcb电路板,定子铁芯,三相
绕组和下端盖;
12.三相绕组以分数槽集中式双层绕组的形式固定在定子铁芯的内部安装槽内,直线轴承和pcb电路板装在定子铁芯两侧,上端盖与下端盖通过螺纹与定子铁芯连接,并压紧定子铁芯内部的直线轴承和pcb电路板。
13.进一步的,永磁体充磁方式为halbach充磁。
14.进一步的,动子部分在直线轴承的约束下沿自身轴线在定子部分内滑动,滑动距离由动子上限位限制,动子部分的极限位置分别是动子上限位与上端盖接触时的位置和动子上限位与上端盖一侧的直线轴承接触时的位置。
15.进一步的,所述定子铁芯内部有12个安装槽,24个线圈以分数槽集中式双层绕组的形式固定在安装槽内。
16.进一步的,所述上端盖一端有用于与车身连接的通孔,通孔内部装有橡胶轴套,通孔两侧分别装有安装垫圈。
17.进一步的,所述上端盖内部有用于对气弹簧活塞的限位的环形凸台。
18.一种采用上述的避震器进行避震的方法,具体方法如下:当来自地面的振动传递给双叉臂独立悬架的下控制臂时,下控制臂将振动传递给动子部分,动子部分与定子部分产生相对速度,控制器根据检测到的速度大小,以及pcb板中的霍尔元件检测出来的永磁体位置信号,采用id=0的控制方法给三相绕组一个交流电流,从而在避震器内部产生沿避震器轴向方向波动的正弦行波磁场,而动子铁芯在行波磁场的作用下产生沿振动方向相反的轴向电磁推力,从而达到避震的功能。
19.本发明与现有技术相比,其显著优点在于:
20.(1)本发明的小型电磁式避震器,将作为避震器阻尼元件的电磁式作动器的动子设计为中空结构,并将作为避震器弹性元件的气弹簧放置于这个中空结构中,使避震器尺寸主要由悬架行程与作动器外径决定,大大减小了避震器的整体尺寸,使得电磁式主动控制避震器拥有用在双叉臂独立悬架结构中的可能。
21.(2)本发明的作动器的永磁体采用halbach充磁方式,相较于其它充磁方式能产生更强的磁场,从而可以使作动器在产生相同推力的情况下的使用更少的材料,达到作动器体积更轻更小的目的;halbach的轴向充磁和径向充磁的长度比为3:2,可以使此厚度下的永磁体所产生的磁场正弦性更高,高次谐波达到最小,保证了推力大小达到要求的情况下作动器推力波动减小到最小。
22.(3)本发明的pcb板内固定一个有检测永磁体位置功能的霍尔元件,可以更精确地检测出动子的实时位置,从而更快速、实时地控制避震器输出推力;且相比于传统的检测动子位置的装置,设计装有霍尔传感器的pcb板所占用空间小,将其装备在作动器内部,不需要占用避震器额外空间,可以让避震器的整体体积更小。
23.(4)本发明通过使用气弹簧代替螺旋弹簧作为避震器的弹性元件,在电磁作动器动子部分采用中空的圆柱状设计,并将气弹簧放置在动子中央的空腔内,在保证电磁作动器推力的同时大大减小了避震器整体尺寸,让主动控制避震器得以应用在双叉臂独立悬架这样紧凑的悬架布置方式中。
24.(5)本发明的避震器,在保证基本功能的前提下,整体尺寸小巧,使其可以装配在采用双叉臂独立悬架的线控底盘上;可以通过对小型直线电磁作动器推力的控制,来改变
避震器的阻尼特性,来匹配线控底盘的不同工况;可以在线控底盘在颠簸路面行驶时,吸收路面带来的振动进行发电,并储存在线控底盘的蓄电池中,来增加线控底盘的续航;另外,取消了传统减震器中的液压阻尼器,没有液压油,所以不会出现液压油渗漏的情况,也没有油封等配件,使用寿命长,且免维护。
附图说明
25.图1为本发明的小型电磁式避震器三维示意图。
26.图2为本发明动子部分剖面示意图。
27.图3为本发明定子部分和上端盖装配剖面示意图。
28.图4为本发明上端盖,定子部分和动子部分装配剖面示意图。
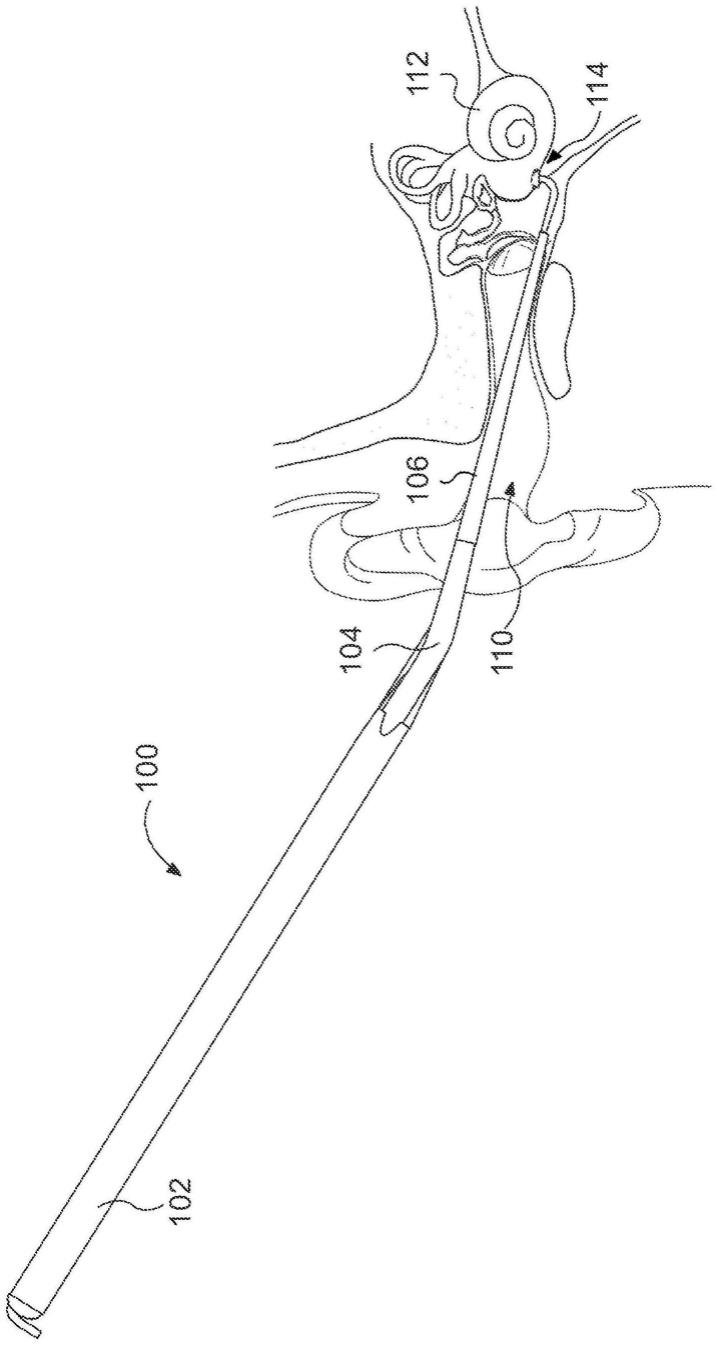
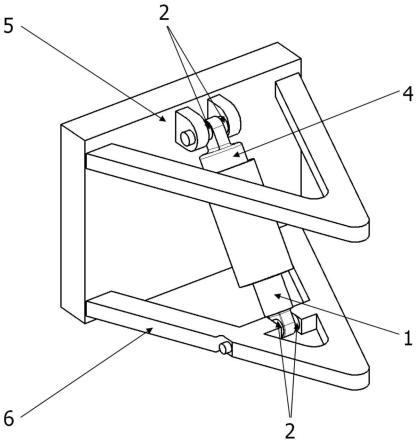
29.图5为本发明小型电磁式避震器装配示意图。
30.附图标记说明:
31.1-作动器动子部分,2-安装垫圈,3-作动器定子部分,4-上端盖,5-车身,6-双叉臂独立悬架下控制臂,1-1-动子连杆,1-2-动子螺纹柱,1-3-动子铁芯,1-4-永磁体,1-5-气弹簧缸体,1-6-气弹簧活塞,1-7-动子上限位,3-1-直线轴承,3-2-pcb电路板,3-3-定子铁芯,3-4-三相绕组,3-5-下端盖。
具体实施方式
32.下面结合附图对本发明作进一步详细描述。
33.结合图1,一种基于线控底盘双叉臂独立悬架的可主动控制的小型电磁式避震器,包括作动器动子部分1,安装垫圈2,作动器定子部分3与上端盖4。作动器动子部分1从作动器定子部分3的一端放入后用上端盖4通过螺纹与作动器定子部分3连接,并对作动器动子部分1达到限位的作用。
34.结合图2,作动器动子部分1包括动子连杆1-1,动子螺纹柱1-2,动子铁芯1-3,永磁体1-4,气弹簧缸体1-5,气弹簧活塞1-6,动子上限位1-7。若干环状的永磁体1-4套在空心柱状动子铁芯1-3上,动子螺纹柱1-2与动子铁芯1-3焊接用于对永磁体1-4的固定。气弹簧包括气弹簧缸体1-5和气弹簧活塞1-6两个部分,气弹簧活塞1-6与气弹簧缸体1-5构成移动副,气弹簧活塞1-6和气弹簧缸体1-5能做同轴直线运动,为避震器提供弹性支撑力。气弹簧放置在空心柱状动子铁芯1-3内部,动子连杆1-1与气弹簧缸体1-5通过螺纹连接,并通过螺纹与动子铁芯1-3一端的动子螺纹柱1-2连接固定。动子上限位1-7通过螺纹与动子铁芯1-3另一端的动子螺纹柱1-2连接固定。
35.结合图3,上端盖4通过螺纹与作动器定子部分3连接的同时,将放在作动器定子部分3内部定子铁芯3-3一端的凸台上的装有霍尔传感器的pcb电路板3-2和直线轴承3-1压紧固定。三相绕组3-4以分数槽集中式双层绕组的形式固定在定子铁芯3-3内部槽内。另外的霍尔传感器的pcb电路板3-2和直线轴承3-1装在作动器定子部分3的内部定子铁芯3-3另一端的凸台上,并用下端盖3-5进行压紧固定。
36.结合图4,小型电磁作动器的三相绕组3-4以分数槽集中式双层绕组的形式固定在定子铁芯3-3内部槽内,两个装有霍尔传感器的pcb电路板3-2和直线轴承3-1分别放在定子铁芯3-3两端的凸台上。由动子连杆1-1,动子螺纹柱1-2,动子铁芯1-3,永磁体1-4,气弹簧
缸体1-5,气弹簧活塞1-6,动子上限位1-7组成的作动器动子部分1从作动器定子部分3的一端放入作动器定子部分3后用上端盖4通过螺纹与作动器定子部分3连接,压紧定子铁芯3-3一端的装有霍尔传感器的pcb电路板3-2和直线轴承3-1的同时对作动器动子部分1达到限位的作用,并通过上端盖4内部环形凸台对气弹簧一端进行固定。定子铁芯3-3另一端和下端盖3-5使用螺纹连接,下端盖3-5对定子铁芯3-3内部的装有霍尔传感器的pcb电路板3-2和直线轴承3-1压紧固定。
37.结合图4与图5,上端盖4一端的孔两侧装有安装垫圈2,通过螺栓与线控底盘的车身进行连接,避震器可以绕螺栓轴线方向进行转动。作动器动子部分1一端的孔两侧装有安装垫圈2,通过螺栓与线控底盘双叉臂独立悬架的下控制臂进行连接,避震器可以绕螺栓轴线方向进行转动。当下控制臂运动时,由于气弹簧的一端被上端盖4限位,所以作动器动子部分1运动会压缩气弹簧,此时作动器动子部分1相对作动器定子部分3和上端盖4向上运动。
38.工作原理阐述如下:
39.当来自地面的振动传递给双叉臂独立悬架下控制臂6时,双叉臂独立悬架下控制臂6将振动传递给动子1,动子1就与定子3有一个相对速度,控制器根据检测到的速度大小,以及pcb电路3-2板中的霍尔元件检测出来的动子1的实时位置,采用id=0的控制方法给三相绕组3-4一个特定相位的交流电流,从而在作动器内部产生沿作动器轴向方向波动的与永磁体1-4的磁场相斥的正弦行波磁场,动子1就在行波磁场的作用下产生沿振动方向相反的轴向电磁推力,从而达到避震的功能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。