1.本发明属于机械领域,设计一种水下作业机器人,具体涉及一种仿生水母的涡环推进式航行器。
背景技术:
2.目前,现有的水下机器人常以螺旋桨推进或喷水推进作为动力源,但往往存在着效率低,噪音大等问题。而随着对水下作业要求的提高亟需一种新型的进行高效推进方式。
3.水母,乌贼等生物,依靠喷水推进这一功能特点在水下移动,喷水推进是一种特殊的推进方式,相较于螺旋桨推进具有噪声小,适应工况能力强,机械结构简单寿命长,抗空泡性能良好,周围流场稳定,高速工况下推进效率较高等优点,在一些领域已得到应用。虽然其相对于螺旋桨推进有诸多优势,但仍存在低速工况下推进效率不足的问题;
4.涡环是一种常见的流体现象,如烟圈或者水中的气泡等,是一片旋转的流体区域在相同或不同的周围流体中运动形成的一种圆环状的涡流。科学家观测到许多水中生物游动时,后面会形成一系列的涡环,这些涡环在它们的推进机理中起着重要的作用。水中生物是将自身能量传递给周围的水引起的反冲作用实现推进的,而为了达到推进的最高效,周围的水都会以涡环结构形式存在,以尽可能多的带走水的质量和冲量。实验表明,涡环对质量和动量的输送能力要大于等量的直流液体。
技术实现要素:
5.本发明的目的在于经过研究水母产生涡环的原理,提出一种仿生的水下推进器,以提高现有喷水推进器的效率,降低能耗。
6.本项目涉及到水母产生涡环的原理
7.研究表明,水母体腔内的水向后喷出时并不是直线喷射,而是在周围流体的作用下形成涡环结构,其形态为漩涡向后翻卷成的一个三维环状结构,当水母的伞体收缩时,会形成一个环状的启动涡环,其周围的流体受到诱导一起运动,带动水母向前推进。而当收缩动作完全发生之后,涡环充分发展,从水母身体边缘脱离。而在舒张的过程中则形成相反方向的停滞涡环。而在下一次收缩开始的时候,停滞涡环诱导水流流入水母腔体内,其中部分于启动涡环合并侧向喷出,从而在反作用下使水母被推动前进。
8.涡流环对质量和动量的输送作用要大于等量的直线射流液体,涡流环形态的不同将会影响其推进效率。当水母在静止流场喷水时,对涡环结构造成影响的是涡环形成数l/d,其中l为喷射流体长度,d为喷口直径。当涡环形成数较大时,会在主涡环后形成一系列二次涡流,而当涡环形成数较少时,会形成单个环量较大的主涡环,此涡环推进效率较高,喷射获得的推进力也较大。
9.本发明是通过以下技术方案实现的:
10.一种仿生水母的涡环推进式航行器,其特征在于:包括
11.航行器本体,为整个航行器的承载构件;
12.喷水推进模块,设于航行器本体尾部,用于提供航行动力;
13.所述喷水推进模块包括固定支撑板、移动喷水板、环形分布设置于固定支撑板和移动喷水板之间的若干弹性片、包裹在所有弹性片外的弹性膜以及用于改变固定支撑板、移动喷水板之间距离的压缩装置,所述弹性膜两端分别与固定支撑板、移动喷水板密封相连以形成可变体积弹性腔,所述固定支撑板中部设有与可变体积弹性腔内连通的喷水口;
14.所述压缩装置启动时用于驱动移动喷水板以轴向线性运动方式靠近固定支撑板,环形分布的弹性片两端受到挤压后中部径向向外挤压弹性膜,使得可变体积弹性腔中部径向向外膨胀,从而增大腔体体积,从喷水口吸水;
15.所述压缩装置停止时,在弹性片和弹性膜的恢复弹力作用下可变体积弹性腔内的水快速挤压,从喷水口喷出,产生涡流环,实现喷水推进。
16.与现有技术相比,本发明有益效果如下:
17.本发明为仿生水母的水下涡环推进式航行器,通过动力机械的方式模拟水母喷水动作,开辟了新的喷水推进器工作模式,大大提高了喷水式推进器的推进效率。相比于传统螺旋桨推进噪音更小,无空泡,能量利用率更低,能够在水下特种作业。
附图说明
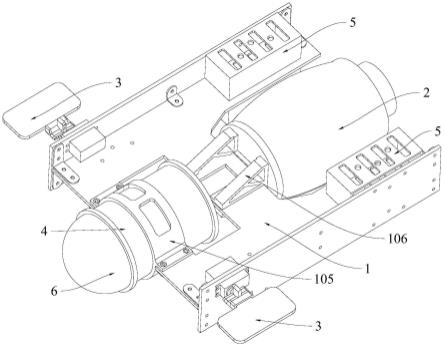
18.图1是本发明仿生水母的涡环推进式航行器总体图。
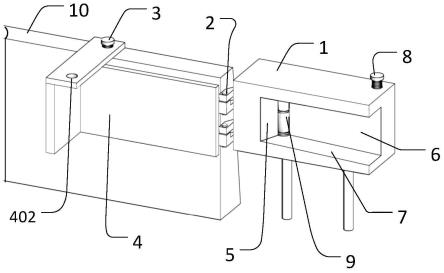
19.图2是去掉部分弹性膜的喷水推进模块示意图。
20.图3是去掉部分弹性膜和弹性片的推进模块示意图。
21.图4是去掉喷水推进模块的涡环推进式航行器示意图。
22.1-航行器本体,101-主承力板,102-侧板,103-缺口,104-角钢连接件,105-防水仓固定件,106-推进模块连接件,2-喷水推进模块,21-固定支撑板,211-支撑悬臂,22-移动喷水板,221-喷水口,222-支撑臂,23-弹性片,24-压缩装置,241-压缩电机,242-齿条,243-齿轮,244-滑槽,245-滑条,246-电机固定套筒,25-弹性膜,3-方向控制模块,301-鱼鳍板,302-舵机,4-主控模块,5-浮力舱,6-防水仓。
具体实施方式
23.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
24.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
25.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
26.如图1所示,一种仿生水母的涡环推进式航行器,包括
27.航行器本体1,为整个航行器的承载构件;
28.喷水推进模块2,设于航行器本体1尾部,用于提供航行动力;
29.所述喷水推进模块2包括固定支撑板21、移动喷水板22、环形分布设置于固定支撑板21和移动喷水板22之间的若干弹性片23、包裹在所有弹性片23外的弹性膜25以及用于改变固定支撑板21、移动喷水板22之间距离的压缩装置24,所述弹性膜25两端分别与固定支撑板21、移动喷水板22密封相连以形成可变体积弹性腔,所述固定支撑板21中部设有与可变体积弹性腔内连通的喷水口221;
30.所述压缩装置24启动时用于驱动移动喷水板22以轴向线性运动方式靠近固定支撑板21,环形分布的弹性片23两端受到挤压后中部径向向外挤压弹性膜25,使得可变体积弹性腔中部径向向外膨胀,从而增大腔体体积,从喷水口221吸水;
31.所述压缩装置24停止时,在弹性片23和弹性膜25的恢复弹力作用下可变体积弹性腔内的水快速挤压,从喷水口221喷出,产生涡流环,实现喷水推进。
32.通过压缩装置24压缩时,移动喷水板22缓慢向固定支撑板21靠拢,使得可变体积弹性腔缓慢膨胀,通过喷水口221缓慢吸水;压缩装置24压缩到极限停止时;由于已经没有动力,弹性片23和弹性膜25快速恢复,所蓄能量用于快速挤压可变体积弹性腔内的水,使得可变体积弹性腔内的水快速从喷水口221喷出,产生反冲力实现推进,并形成涡流环,提高推进效果。
33.作为一种优选实施例,所述可变体积弹性腔中部截面大于两端的截面,使得所述可变体积水腔的初始状态为橄榄型腔,这样可以保证通过压缩装置24相对挤压固定支撑板21和移动喷水板22时,可变体积弹性腔中间是向外膨胀。
34.对涡环结构造成影响的是涡环形成数l/d,其中l为喷射流体长度,d为移动喷水板上喷水口直径。当涡环形成数较大时,会在主涡环后形成一系列二次涡流,而当涡环形成数较少时,会形成单个环量较大的主涡环,此涡环推进效率较高,喷射获得的推进力也较大。
35.实际上,喷射流体长度无法直接确定,因此用喷出水体积除以喷水口面积间接得到,即可得出涡环形成数e的计算公式e=(4v)/(πd3),所述喷水推进模块的涡环形成数e优选范围为2-5,最优为4,在该涡环形成数下推进效率最高;涡环形成数e=(4v)/(πd3),v为喷水推进模块每次收缩动作时喷出水的体积,根据可变体积弹性腔的尺寸和压缩装置24行程计算得到,对于固定设计尺寸来说,v为固定值。
36.作为一种优选实施例,所述弹性片23为弹性钢片或者环氧树脂弹性片。
37.作为一种优选实施例,所述固定支撑板21为圆形板固定板,前端设有用于安装在航行器本体1上的连接件,后端设有用于安装压缩电机241的电机固定套筒246,所述移动喷水板22为与固定支撑板21直径相同的圆形移动板,圆形移动板的中心处设有渐缩型喷水口221。
38.作为一种优选实施例,所述压缩装置24为线性运动机构,为气缸、电动推杆、丝杆螺母机构、齿轮齿条机构中的任意一种。
39.进一步优选,所述压缩装置24为齿轮齿条机构,其包括压缩电机241、齿条242以及分别与固定支撑板21、移动喷水板22固定相连的滑条245、滑槽244,所述滑条245装配在滑槽244内,使得固定支撑板21和移动喷水板22之间形成线性滑动副,所述压缩电机241和齿
条242分别与固定支撑板21、移动喷水板22固定相连,压缩电机241的输出轴上设有与齿条242相啮合的齿轮243;齿条242的方向与线性滑动副相同,从而使得压缩电机241的转动通过齿轮齿条啮合转换为线性滑动副方向的线性运动。
40.进一步优选,所述滑槽244设于移动喷水板22上,且两个滑槽244对称向背的设置在移动喷水板22上,为齿条242预留安装空间,所述齿条242安装在其中一个滑槽244内侧背部,使得结构更加紧凑。
41.进一步优选,所述移动喷水板22上设有一对向内侧轴向延伸且对称设置的支撑臂222,一对滑槽244向背的安装在该对支撑臂222外侧;所述固定支撑板21上设有向内侧延伸并且偏心设置的电机固定套筒246,电机固定套筒246上下两端均设有支撑悬臂211,上述一对支撑臂222设置于该对支撑悬臂211内,两个滑条245相对的固定设置于该对支撑悬臂211内侧。
42.作为一种优选实施例,所述喷水推进模块2设于航行器本体1尾部中间,航行器本体1的两侧前端分别设有一个能够控制转动的鱼鳍板301形成方向控制模块3,所述鱼鳍板301的转动轴心与航行器本体1前进方向垂直,通过改变两个鱼鳍板301的转动角度,从而改变两边阻力大小,实现涡环推进式航行器的转向。所述鱼鳍板301为一块平板,可以采用亚克力材料支持。
43.进一步优选,所述航行器本体1的两侧前端分别设有一个用于转向的舵机302,所述鱼鳍板301安装在舵机302的输出轴上。
44.方向控制模块3的转向原理如下:
45.正常情况下,所述涡环推进式航行器通过喷水推进模块2提供推力,向前直线运动,当涡环推进式航行器需要向左侧转向时,通过舵机302控制左侧的鱼鳍板301旋转与前进方向垂直(此时鱼鳍板301前行阻力最大),右侧的鱼鳍板301旋转与前进方向平行(鱼鳍板301前行阻力最小),这样涡环推进式航行器航行过程中,前端左侧受到较大阻力,前端右侧受到较小阻力,整个涡环推进式航行器在尾部的喷水推进模块2的推进作用下就向左旋转;左侧的鱼鳍板301与前进方向成夹角越大,造成的阻力越大,整体转弯半径就越小。右侧转向原理与上述相同,将左右两侧鱼鳍板301动作方式交换即可。
46.当需要上浮时,同步调整两侧的鱼鳍板301使其前端上扬,这样通过喷水推进模块2提供动力推进时,两个鱼鳍板301与流体作用产生向上的升力,使得涡环推进式航行器在推进过程中逐渐上浮;当需要下沉时,同步反向调整两个鱼鳍板301的姿态,原理相同。
47.作为一种优选实施例,所述航行器本体1前端设有配重模块,所述喷水推进模块2两侧的航行器本体1上设有浮力舱5,通过调整配重模块的配重和浮力舱5的浮力大小,调整整个涡环推进式航行器在水中处于平衡状态。
48.作为一种优选实施例,所述配重模块包括防水仓6和设于防水仓6内的配重,所述涡环推进式航行器还包括主控模块4,所述主控模块4作为配重安装在防水仓6内;所述主控模块4包括电源、控制器、电机驱动器、舵机驱动器和无线模块(图中未画出),所述电源为整个涡环推进式航行器供电,所述控制器用于通过无线模块接收制冷并控制整个涡环推进式航行器;所述电机驱动器分别通过信号线与控制器和压缩电机241相连,所述舵机驱动器分别通过信号线与控制器和舵机302相连。
49.进一步优选,所述浮力舱5为pvc发泡材料制成的浮力块;所述防水仓6为采用亚克
力材料制成的壳体舱。
50.作为一种优选实施例,本发明的航行器本体1包括水平设置的主承力板101和属于主承力板101两侧的侧板102,均采用亚克力材料制成;所述主承力板101和两侧的侧板102之间通过角钢连接件104相连。
51.所述防水仓6通过防水仓固定件105固定在主承力板101前端中部,两个舵机302固定安装在两个侧板102前端,所述浮力舱5安装在侧板102后端,所述主承力板101尾部中间设有缺口103,所述喷水推进模块2安装在该缺口103内,且固定支撑板21通过推进模块连接件106固定在主承力板101上。
52.作为一种优选实施例,所述控制器为单片机,所述压缩电机241为57步进电机、其工作电压为24v,因此采用输出额定电压24v的锂电池作为输出恒压源,连接到步进电机驱动器。该恒压源通过lm2596s可调降压模块稳压至5v给主控单片机供电。另外控制装置上浮下潜和转向的两只舵机302需要7.0v的驱动电压,因此需要再通过另外一个lm2596s可调降压模块稳压至7.0v为舵机302提供电压。经计算,系统最大总电流不超过5.0a。
53.作为一种优选实施例,本发明使用单片机作为装置的嵌入式系统主控,为减小开发周期,提高控制效率,使用stm32f405rgt6派生板-pyboard v1.1为主控单片机。单片机通过gpio模拟输出脉冲至步进电机驱动器,驱动器接收到信号则控制57步进电机进行转动。舵机302的信号线连接至单片机,由定时器产生固定频率的pwm波形,控制舵机302转动到固定角度。wifi模块连接至单片机的uart,单片机可接收到远程操作信号。
54.作为一种优选实施例,本发明采用的57步进电机,其步进角1.8
°
、法兰尺寸57mm,具有低功耗、大力矩、高精密度、高性能的优势。为使电机精度更高,使用闭环步进电机驱动器对步进电机进行驱动控制。驱动器工作在10细分状态时,电机转动0.18
°
。电机驱动型号为tb6600,输入信号共有三路,分别是:步进脉冲信号pul ,pul-;方向电平信号dir ,dir-;脱机信号en ,en-。
55.作为一种优选实施例,本发明采用的舵机302角度范围为0到180度。单片机pwm信号频率为50hz,调节脉冲宽度为0.5-2.5ms,可控制舵机302转动到0-180度的某个角度并维持不动。初始时,脉冲宽度为1.5ms,舵机302保持中位,在接收到上浮下潜和转向的命令后,pwm频率保持不变,脉冲宽度变化,致使舵机302角度改变。
56.作为一种优选实施例,本发明采用的无线模块为esp8266 wifi模块,该模块是一个完整且自成体系的wifi网络解决方案,能够独立运行,也可以作为从机搭载于其他主机运行。模块通过uart与mcu主机进行通信,mcu向其发送at指令,配置无线网络。将模块配置为ap模式,终端设备可搜索到模块发射的wifi信号,连接后可向mcu串口发送消息。mcu根据接收到的消息类型,执行相应程序段。
57.本发明正常使用,通过驱动57步进电机,57步进电机将转动通过齿轮243齿条242结构转换为直线运动,驱动移动喷水板22向固定支撑板21靠拢,挤压弹性片23两端,弹性片23中间径向向外挤压弹性膜25,使得可变体积弹性腔中间径向向外膨胀,体积增大,在内部形成停止涡环,停止涡环带动流体从外部通过喷水口221流进可变体积弹性腔内,完成吸水动作;当通过移动喷水板22对弹性片23挤压到达极限时,停止57步进电机(或者设置57步进电机快速反转,调整好速度,配合弹性片与弹性膜回弹的力),弹性片23和弹性膜25快速恢复,所蓄能量用于快速挤压可变体积弹性腔内的水,使得可变体积弹性腔内的水快速从喷
水口221喷出,并在喷水口221尾部流体区域形成一个起动涡环,这个起动涡环会和周围流体相互作用,使其一起运动;当可变体积弹性腔完全舒张(到达没有蓄力的初始状态)时,起动涡环逐渐充分伸展并脱离喷水口221。再次启动57步进电机上述动作,即可产生持续的反推力。当推进模块作用时,通过手机app向主控板发送推进指令,电控模块控制24v电源驱动步进电机转动,带动电机轴上所连接的齿轮转动,当齿轮顺时针转动时,与其相啮合的齿条也开始朝着电机套筒所在一侧的方向运动。当齿轮逆时针转动时,当齿轮带动齿条运动时,由于滑轨的连接,喷水口也被带动朝着电机套筒一侧运动。由于弹性片两端限制在电机套筒与喷水口的圆周,当两零件做相对运动的时候,弹性片在外力作用下被压弯成一定的弧度,此时,相连接的弹性膜也随之呈球状包裹,水流也随之被吸入弹性膜所包裹的墙体内。这个过程主要模拟水母收缩身体吸水的过程,速度相对缓慢。
58.而当腔体内吸入水流之后,通过对步进电机进行调速,使其停止转动,此时,弹性片失去了外力的作用,由于其自身具有较大的弹性,弹性片恢复成原来的形状,也迫使电机套筒与喷水口向相反的方向运动,弹性膜也随之恢复成为橄榄状。由于选择的材料弹性较大,整个过程较为迅速,在弹性膜形状变化的过程中,其腔体内的水流被加速喷出,而在渐缩喷口的作用下,水流的流通截面进一步被缩小,从而其被旋转加速,最终呈涡环状喷出。由于涡环本身输送能量的能力较强,在涡环喷出的同时,装置被顺利向前推动。
59.如图3所示,本发明的方向控制模块3采用舵机302进行转动控制,当装置需要向左侧转向时,通过wifi模块发送左转指令,控制器收到指令后会驱动装置左侧舵机302旋转90
°
,此时左侧的鱼鳍板301垂直于运动方向,右边的鱼鳍板301平行于运动方向,此时装置左侧受到水的阻力较大,右侧阻力较小,装置在向前方推进时,由于两侧受力不均,导致右侧运动速度快于左侧,装置向左侧旋转,完成以上过程即为一个完整的左向旋转运动过程。当装置需要向右侧转向时,通过wifi模块发送右转指令,主控板收到指令后会驱动装置右侧舵机302旋转90
°
,此时右侧收到阻力较大,装置向右侧旋转,完成右转运动;当航行器转向完成需要直线行驶时,按下复位按钮,会通过wifi模块向主控板发送复位指令,两侧舵机302重新复位,保持两边挡板与运动方向平行,此时阻力较小,装置直线向前行驶。当装置需要上浮时,通过wifi模块发送左转指令,控制器收到指令后会驱动装置左侧舵机302和右侧舵机302同时旋转一定角度(比如30
°
,两个舵机302相对设置,为了保证鱼鳍板301同向转动,舵机302旋转方向相反),使得两个鱼鳍板301前侧上扬,此时流体给鱼鳍板301一个向上的升力,驱动整个装置上浮,下沉刚好相反。
60.以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。