1.本发明属于航天器在轨服务技术领域,特别是涉及一种基于子母航天器的在轨建造系统。
背景技术:
2.随着太空技术的发展,阿尔忒弥斯(artemis)计划、中俄月球基地建设、火星移民等大型空间设施建造任务相继被提出,任务类型更多样、任务周期更长、任务流程更复杂、目标轨道更远,对航天器在轨建造提出了更高的要求。受现有运载能力限制,在现有“专星专用、单独发射”的任务模式下,航天器功能严重受限,无法满足所有在轨建造任务的要求。其次,“专星专用”限制了航天器功能,不支持航天器功能随任务水平提升而进行拓展。
3.现有技术中常规操作方法包括专利[cn206691377u]提出了使用空间机器人的空间桁架在轨装配系统,包括多功能补给舱、设置在在补给舱内的初始轨道和四个空间装配机器人。空间装配机器人在舒适轨道上移动,实现位姿调整;通过空间机器人上安装有驱动槽,用于驱动杆件移动;杆件端部安装有连接器。该专利通过空间机器人移动杆件,通过连接器连接杆件,实现在轨桁架装配。蜘蛛制造(spiderfab)是tui公司在nasa资助下研发的一种太空制造系统。该项目主要通过trusselator桁架制造器使用cf/peek材料在轨制造桁架,通过spiderfab多臂机器人发射碳纤维条并熔接,集成已制造出的部组件。专利[cn202110919759.x]提出了基于多空间机器人系统的超大型太空望远镜组装方法。通过七自由度空间机械臂和可再生多分支超冗余空间机器人组合工作,完成太空望远镜的镜面拼接。专利[cn202110921154.4]采用类似的架构实现了太空望远镜系统的在轨维护。
[0004]
但现有的系统仍然存在以下缺陷:
[0005]
(1)现有技术方案首先在功能上有较大局限性,现有方案仅针对单一简单任务,功能密度低,只能完成如在轨装配、在轨制造等单一任务,无法独立满足未来在轨制造、组装、维护等多元化复杂的任务需求。
[0006]
(2)现有技术方案主要采用单一航天器独立工作,在面对大型空间系统在轨建造这类需要复杂操作的任务时,效率低下。
[0007]
(3)现有技术方案大部分基于专星专用的设计理念,但后期任务变化,需要执行新的任务时,不具备在轨扩展升级能力。
[0008]
(4)现有技术方案采用单一航天器工作模式,如果航天器某一部件失效,不具备在轨自维修的能力。
[0009]
(5)现有技术方案携带原材料相对有限,当原材料消耗完成后,建造航天器寿命即终结。
[0010]
(6)现有技术方案建造任务控制主要依赖地面人员管控,建造大规模设施时自动化程度低,工作难度大。
[0011]
(7)现有技术方案的建造机器人需携带太阳能帆板、大尺寸天线等设备,干扰机械臂工作,限制机械臂工作空间。
技术实现要素:
[0012]
本发明目的是为了解决大型空间设施在轨建造困难、成本高、后期拓展性不足的问题,提出了一种基于子母航天器的在轨建造系统。
[0013]
本发明是通过以下技术方案实现的,本发明提出一种基于子母航天器的在轨建造系统,所述系统包括一个工厂母舰航天器和若干个空间机器人子航天器;在轨建造系统入轨前,子航天器以功能模块为单位装载在母舰航天器内部,与母舰航天器一起由运载火箭发射入轨;入轨后,工厂母舰机械臂按需将功能模块进行装配,组成具体执行各种任务的空间机器人子航天器;在轨建造过程中,工厂母舰接收地面任务指令,对任务进行分工与规划,将分解后的任务下发至各个空间机器人开展工作;任务完成后,子航天器飞回母舰,由母舰进行拆解与收纳,并一起转移至下一任务地点。
[0014]
进一步地,所述工厂母舰航天器的分系统载荷用于装配机械臂和子航天器的各类模块。
[0015]
进一步地,所述工厂母舰航天器发射时帆板和天线处于收拢状态,可展开高增益天线负责母舰对地通信,广角天线负责对空间机器人通信;母舰航天器入轨后高增益天线展开,帆板释放,露出货物舱,所述货物舱用于装载储存空间机器人的各功能模块;在货物舱内部装有母舰机械臂,用于空间机器人的装配与拆解;货物舱下方为仪器舱,内部装有母舰的各分系统单机。
[0016]
进一步地,所述空间机器人子航天器用于执行零部件制造、搬运和组装多种空间建造任务;所述空间机器人采用模块化设计,将空间机器人划分为中心体、末端执行器、机械臂三大模块,模块间可以自由连接,即插即用。
[0017]
进一步地,所述中心体模块内安装有姿控、计算机、电源和测控各分系统单机;所述中心体模块通过母舰收纳状态下母舰对其无线充电实现能源供给。
[0018]
进一步地,所述机械臂模块为7自由度机械臂,可直接对接在中心体模块上,机械臂末端安装不同的末端执行器模块实现不同的子航天器功能。
[0019]
进一步地,子航天器入轨时以功能模块为单位,存放在母舰航天器的货物舱内,入轨后由母舰机械臂按需组装而成。
[0020]
进一步地,所述子母航天器的在轨建造系统具备单体工作模式、子航天器组装、多体协同工作、拆解回收和自维护五种工作模式,具体为:
[0021]
(1)单体工作模式
[0022]
当子母航天器发射入轨后或在不同建造任务间转运时,在轨建造系统处于转运阶段,子母航天器采用单体工作模式;在单体工作模式下,母舰单体工作,子航天器收纳在母舰的货物舱内,此时,母舰的折叠式天线和可展开太阳能帆板均已展开,分别提供远距离对地通信和电源补给能力,母舰依靠自身携带的推力器进行轨道转移,前往预定工作位置,母舰内安装的母舰机械臂处于收拢状态,子航天器以功能模块为单位固定在母舰航天器的货物舱内部;
[0023]
(2)子航天器组装模式
[0024]
当子母航天器变轨结束抵达建造位置后,在轨建造系统处于准备阶段,子母航天器采用子航天器组装模式,在子航天器组装模式下,母舰根据具体在轨建造任务的需求,确定子航天器的功能、类型和数量,利用母舰机械臂夹取子航天器各功能模块进行拼接组装,
得到所需的空间机器人,完成在轨建造准备工作;
[0025]
(3)多体协同工作模式
[0026]
当建造所需的子航天器全部组装完成后,在轨建造系统即可进入建造阶段,开展在轨建造任务,子母航天器采用多体协同工作模式,在此模式下,母舰规划各个空间机器人子航天器的任务,通过大波束角天线与空间机器人通信,子航天器根据母舰的指令协同开展工作,完成零部件的在轨制造、搬运、组装与拆解回收任务,形成任务闭环,高效实现大型航天器在轨建造;
[0027]
(4)拆解回收模式
[0028]
当建造任务完成后,在轨建造系统进入回收阶段,将空间机器人回收至母舰,子母航天器采用拆解回收模式,此时,各个空间机器人回到母舰,母舰机械臂进行空间机器人拆解和模块的回收固定,子母航天器转换为母舰单体工作,子航天器模块收纳的形式,母舰变轨前往下一任务地点,开始新一轮任务流程;
[0029]
(5)自维护模式
[0030]
当子母航天器出现故障时,子母航天器即进入自维护模式,如果故障出现在子航天器上,故障子航天器停止工作并返回母舰航天器,由母舰机械臂更换故障模块,更换完成后子航天器继续参与建造任务,如果故障出现在母舰航天器上,则由子航天器进行检查与维修;在自维护模式下,除参与维护的子航天器外,其他空间机器人子航天器继续进行建造任务,整个过程由母舰航天器动态调控,并向子航天器发送相应指令。
[0031]
本发明的有益效果为:
[0032]
本发明所述在轨建造系统能够胜任多样化的建造任务,包括在轨制造、在轨装配、在轨搬运、在轨维护等。能够提高大规模空间设施建造效率。并具备后期在轨升级拓展的能力。并且在轨可自重构、可维修,而且能够携带大量原材料,原料可补充。所述系统能够自动化自主地完成大规模建造任务,精简建造机器人设计,使空间机器人工作空间最大化。
附图说明
[0033]
图1是母舰航天器示意图;其中,(a)为收拢状态,(b)为展开状态。
[0034]
图2是空间机器人子航天器型谱示意图;其中,(a)为在轨制造机器人型谱,(b)为在轨搬运机器人型谱,(c)为在轨操作机器人型谱。
[0035]
图3是空间机器人子航天器准备状态示意图。
[0036]
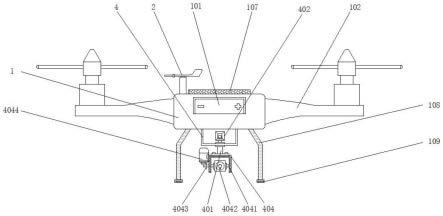
图4是基于子母航天器的在轨建造系统结构图。
具体实施方式
[0037]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
结合图1-图4,本发明提出一种基于子母航天器的在轨建造系统,所述系统包括一个工厂母舰航天器和若干个空间机器人子航天器;在轨建造系统入轨前,子航天器以功能模块为单位装载在母舰航天器内部,与母舰航天器一起由运载火箭发射入轨;入轨后,工厂
母舰机械臂按需将功能模块进行装配,组成具体执行各种任务的空间机器人子航天器;在轨建造过程中,工厂母舰接收地面任务指令,对任务进行分工与规划,将分解后的任务下发至各个空间机器人开展工作;任务完成后,子航天器飞回母舰,由母舰进行拆解与收纳,并一起转移至下一任务地点。
[0039]
具体地,工厂母舰是整个建造系统的核心,是一个能够为子航天器提供能源、通信、收纳、装配拆卸、维护等多种能力的具有完整功能的航天器。母舰航天器具有一般航天器的全部分系统,包括姿轨控、电源、星务、载荷等。其载荷为装配机械臂和子航天器的各类模块。母舰航天器发射时帆板和天线处于收拢状态,如图1(a)所示。其中,可展开高增益天线负责母舰对地通信,广角天线负责对空间机器人通信。母舰航天器入轨后高增益天线展开,帆板释放,露出货物舱,如图1(b)所示。其中,货物舱用于装载储存空间机器人的各功能模块;在货物舱内部装有母舰机械臂,用于空间机器人的装配与拆解;货物舱下方为仪器舱,内部装有母舰的各分系统单机,包括计算机、电源控制器、蓄电池、飞轮、贮箱等。
[0040]
空间机器人子航天器主要用于执行零部件制造、搬运、组装等多种空间建造任务。为满足多样化的任务需求,机器人采用模块化设计,将空间机器人设划分为中心体、末端执行器、机械臂三大模块,模块间可以自由连接,即插即用。中心体模块内安装有姿控、计算机、电源、测控等各分系统单机。为提高作业效率、减小中心体模块体积,中心体模块上取消了太阳能电池片,通过母舰收纳状态下母舰对其无线充电实现能源供给。机械臂模块为7自由度机械臂,可直接对接在中心体模块上。机械臂末端安装不同的末端执行器模块实现不同的子航天器功能,如安装通用工具模块可实现夹持、安装拆解等功能,安装3d打印模块可实现在轨制造功能,安装移动模块可实现空间移动;根据制造、搬运、组装三种任务,设计了三种子航天器型谱,如图2所示。子航天器入轨时以功能模块为单位,存放在母舰航天器的货物舱内,如图3所示;入轨后由母舰机械臂按需组装而成。后续若有其他任务需求,只需发射相应的末端执行器入轨,定义新的子航天器型谱。
[0041]
按照航天器建造的流程,大型航天器在轨建造可分转运、准备、建造、回收四个阶段,相应地,子母航天器系统具备单体工作模式、子航天器组装、多体协同工作、拆解回收、自维护这五种工作模式。
[0042]
(1)单体工作模式
[0043]
当子母航天器发射入轨后或在不同建造任务间转运时,在轨建造系统处于转运阶段,子母航天器采用单体工作模式;在单体工作模式下,母舰单体工作,子航天器收纳在母舰的货物舱内,此时,母舰的折叠式天线和可展开太阳能帆板均已展开,分别提供远距离对地通信和电源补给能力,母舰依靠自身携带的推力器进行轨道转移,前往预定工作位置,母舰内安装的母舰机械臂处于收拢状态,子航天器以功能模块为单位固定在母舰航天器的货物舱内部;
[0044]
(2)子航天器组装模式
[0045]
当子母航天器变轨结束抵达建造位置后,在轨建造系统处于准备阶段,子母航天器采用子航天器组装模式,在子航天器组装模式下,母舰根据具体在轨建造任务的需求,确定子航天器的功能、类型和数量,利用母舰机械臂夹取子航天器各功能模块进行拼接组装,得到所需的空间机器人,完成在轨建造准备工作;
[0046]
(3)多体协同工作模式
[0047]
当建造所需的子航天器全部组装完成后,在轨建造系统即可进入建造阶段,开展在轨建造任务,子母航天器采用多体协同工作模式,在此模式下,母舰规划各个空间机器人子航天器的任务,通过大波束角天线与空间机器人通信,子航天器根据母舰的指令协同开展工作,完成零部件的在轨制造、搬运、组装与拆解回收任务,形成任务闭环,高效实现大型航天器在轨建造;
[0048]
(4)拆解回收模式
[0049]
当建造任务完成后,在轨建造系统进入回收阶段,将空间机器人回收至母舰,子母航天器采用拆解回收模式,此时,各个空间机器人回到母舰,母舰机械臂进行空间机器人拆解和模块的回收固定,子母航天器转换为母舰单体工作,子航天器模块收纳的形式,母舰变轨前往下一任务地点,开始新一轮任务流程;
[0050]
(5)自维护模式
[0051]
当子母航天器出现故障时,子母航天器即进入自维护模式,如果故障出现在子航天器上,故障子航天器停止工作并返回母舰航天器,由母舰机械臂更换故障模块,更换完成后子航天器继续参与建造任务,如果故障出现在母舰航天器上,则由子航天器进行检查与维修;在自维护模式下,除参与维护的子航天器外,其他空间机器人子航天器继续进行建造任务,整个过程由母舰航天器动态调控,并向子航天器发送相应指令。
[0052]
任一在轨建造过程均可被划分为转运、准备、建造、回收四个阶段,在当前建造任务完成后,在轨建造系统转运至下一工作区域,开展下一建造任务,形成“转运-准备-建造-回收-转运”的闭环工作体系。
[0053]
如有新的任务类型需求,只需发射相应末端执行器模块即可,无需重复发射空间机器人,具有良好的拓展性。如任务原料或模块缺少时,只需发射相应原料或模块即可,无需重新发射建造航天器,具有可持续性。
[0054]
本发明所述在轨建造系统具有如下优点:
[0055]
(1)胜任多样化的建造任务,包括在轨制造、在轨装配、在轨搬运、在轨维护等。子航天器具有多种功能,可实现多种在轨建造功能;基于多种航天器功能,设计了在轨制造、在轨搬运、在轨操作三种机器人型谱,可实现在轨制造、在轨装配、在轨搬运、在轨维护等多种任务。
[0056]
(2)提高大规模空间设施建造效率。
[0057]
采用多子航天器分工协作工作模式,相较于传统单航天器串行作业的工作模式,能够大大提高建造效率。
[0058]
(3)具备后期在轨升级拓展的能力。
[0059]
空间机器人子航天器采用模块化设计,末端执行器模块决定了子航天器的功能。通过后期补充并安装新类型的末端执行器模块,可实现空间机器人子航天器能力在轨升级拓展,无需重复发射空间机器人,降低建造成本、提高任务效率。
[0060]
(4)在轨可自重构、可维修。
[0061]
子母航天器系统设计了自维护模式,子航天器和母舰航天器可互相维修,无需其他航天器辅助。
[0062]
(5)携带大量原材料,原料可补充。
[0063]
借助母舰航天器的货物舱,可携带大量在轨建造原材料和空间机器人模块,实现
在轨长期工作;当原材料不足时,无需重复发射建造航天器,只需发射相应原材料即可,实现可持续建造。
[0064]
(6)自动化自主地完成大规模建造任务。
[0065]
建造任务指令由地面发送至母舰,经由母舰规划调度之后将具体任务下发至各子航天器,建造过程无需地面对子航天器进行操作,具有较高的自主性。
[0066]
(7)借助母舰的协同作用,精简子航天器设计,最大化子航天器的工作空间。
[0067]
在收纳阶段,母舰可对子航天器的中心体模块充电,进行能源供应,子航天器无需设计太阳能帆板;母舰接收地面任务指令,经任务规划后转发至子航天器,子航天器无需直接与地面通信,缩小通信天线尺寸。通过上述方法精简子航天器设计,缩小或取消可能影响机械臂工作空间的大尺寸部组件,实现子航天器工作空间最大化。
[0068]
以上对本发明所提出的一种基于子母航天器的在轨建造系统进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。